一种高可靠分布式无人机集群管理系统与方法与流程
- 国知局
- 2024-07-31 23:53:24
本发明涉及无人机,具体为一种高可靠分布式无人机集群管理系统与方法。
背景技术:
1、随着智能物联网技术的发展,无人机作为一种新兴技术已广泛应用于各类应急场景,如森林火灾监测、紧急救援、应急通信等。由于无人机具有灵活、小型化的特点,可携带多种小型传感设备,在危险区域执行环境数据搜集任务,并通过本地或者边缘设备进行计算处理,为决策方提供决策依据。然而,由于单个无人机的感知范围和感知精度有限,无法在有效时间内对感知目标形成多角度、高精度数据搜集,使得单个无人机搜集到的数据存在较大误差。同时,由于环境复杂性和任务多样性,单无人机通常难以满足很多实际任务需求,比如复杂恶劣的战场环境,遮蔽物众多的城市环境等,单无人机由于机载设备数量、感知视点及范围受限等缺陷,通常难以执行持续目标跟踪、全方位饱和攻击等任务。故而,集群协同执行任务逐渐成为趋势。
2、现有技术中,公开的一些无人机集群管理系统通常采用web页面进行信息展示,但传统的web应用和页面在使用时,用户每次点击页面上的某个部分时,浏览器都会向服务器发出一个请求,服务器再做出响应,返回一个完整的新页面,这就造成了浏览器和服务器之间存在着大量的通信,从而导致页面刷新延时较长等问题;无人机集群管理系统在使用过程中,会实时接收无人机传递的数据信息,但为了满足无人机的远距离通信需求,无人机的通信带宽是处于受限的状态,无人机直接把数据传输给无人机集群管理系统时,会影响无人机集群管理系统通信的高效性;且无人机集群管理系统在使用过程中,需要对集群无人机进行路径规划,传统的无人机路径规划方法主要包括基于已知环境信息规划初始航路,在运行过程中,遇到突发障碍时局部调整运行路径,绕过障碍后,继续沿规划航路运行,或者是在遇到突发障碍时,完全规划出一条新航路,沿着新航路继续运行,但这两种方法在使用时,无人机路径规划时效性较低,无法满足实时性要求;基于此,本发明提供一种高可靠分布式无人机集群管理系统与方法。
技术实现思路
1、本发明提供了一种高可靠分布式无人机集群管理系统与方法,解决了上述背景技术中提出的无人机集群管理系统采用web页面进行信息展示时,web页面应用和页面需要刷新整个页面,造成了浏览器和服务器之间存在着大量的通信,从而导致页面刷新延时较长;无人机直接把数据传输给无人机集群管理系统时,影响无人机集群管理系统通信的高效性和采用传统无人机路径规划方法时,无人机路径规划时效性较低,无法满足实时性要求的问题。
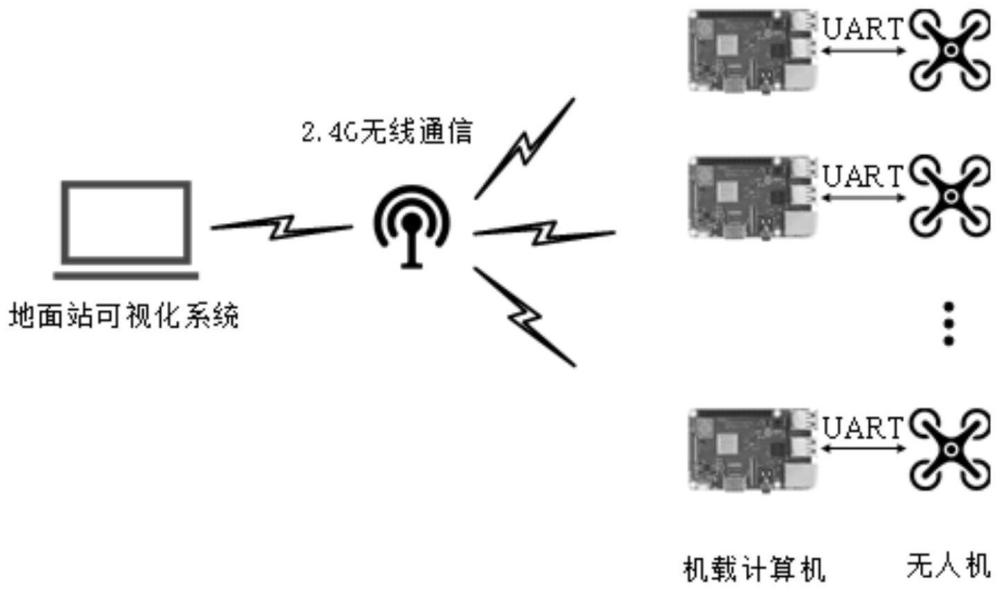
2、本发明提供如下技术方案:一种高可靠分布式无人机集群管理系统,包括硬件模块和软件模块,所述硬件模块包括无人机、机载计算机和地面站系统,所述无人机与记载计算机通过uart通信,所述地面站系统通过无线通信与记载计算机建立通信链路;
3、所述软件模块包括无人机无线通信系统、无人机集群控制系统和地面站可视化软件系统;所述无人机无线通信系统用于实现地面站系统与无人机之间及无人机与无人机之间的无线通信,所述无人机无线通信系统基于grpc远程过程调用,所述grpc采用protocolbuffer作为idl(interface description lanage)接口描述语言;
4、所述无人机集群控制系统是用户任务与无人机控制指令转化的中介,所述无人机集群控制系统的mavlink协议采用基于消息的通信模型,通过定义一系列消息类型来传输数据和命令,并且每个消息类型都有一个唯一的标识符,用于标识消息的类型和用途,所述mavlink协议使用基于请求-响应的通信模式;所述无人机集群控制系统采用基于碰撞预测的无人机集群路径规划算法,通过构建无人机集群碰撞预测模型,预测所有可能发生碰撞的无人机路径,在无人机集群路径规划时提前考虑无人机碰撞,能够在无人机不发生碰撞的前提下,实现无人机与集群的最短路径规划;所述无人机集群控制系统采用向下屏蔽mavlink细粒度的指令结构,向上为用户提供无人机集群状态监控和控制的接口;
5、所述地面站可视化软件系统为用户提供清晰、简单的无人机集群控制软件,用户只需在基于web的可视化页面上提交预期的控制任务,即可实现无人机集群的控制;所述地面站可视化软件系统基于ajax的异步刷新技术实现web页面的局部更新;所述ajax页面局部刷新运行机制为:用户点击页面的某一部分,浏览器将请求发送到页面代码,页面代码创建一个特殊的请求对象,并由浏览器发送给服务器,服务器更新这个请求对象后发送给页面代码,页面代码告诉浏览器只更新页面中已经改变的部分。
6、优选的,所述地面站系统基于x86计算机开发,并通过2.4g无线通信与机载计算建立通信链路。
7、优选的,所述地面站系统与无人机进行通信的第一步是建立连接,地面站系统与无人机建立连接后,会发送一个心跳消息,用于告知无人机地面站系统的存在和状态,无人机接收到心跳消息后,会返回一个心跳响应消息,并且在通信过程中,地面站系统作为主动方,向无人机发送请求信息,无人机作为被动方,接收请求并发送响应信息。
8、优选的,所述mavlink协议中定义了些常用的消息类型,如心跳消息、姿态消息、位置消息等,同时也允许用户自定义消息类型。
9、优选的,所述地面站可视化软件系统实时反馈各个无人机的详细状态信息及显示整个系统内的无人机集群的位置信息,并利用不同的颜色区分处于健康状态的无人机和处于故障状态的无人机。
10、优选的,用户无需手动点击刷新页面,无人机集群的位置信息每隔1秒异步刷新一次,用户可以清晰观察无人机在地图上的运动变化。
11、优选的,所述地面站可视化软件系统提供三大类无人机控制任务,分别为一键起降、单机控制和编队控制;其中,一键起降用于实现单架无人机或编队的起飞、降落、返航功能;单机控制提供了单架无人机的飞行控制;编队控制提供组织不同类型编队及编队飞行的功能,并且用户可进行自定义编队。
12、一种高可靠分布式无人机集群管理系统的管理方法,包括以下步骤:
13、步骤一、地面站系统与无人机建立连接,地面站系统在与无人机建立连接后,会发送一个心跳消息,用于告知无人机地面站的存在和状态,无人机接收到心跳消息后,会返回一个心跳响应消息;
14、步骤二、无人机基于grpc的无人机集群无线通信系统实现与地面站系统的无线通信;
15、步骤三、工作人员通过地面站可视化软件系统的可视化页面提交预期的控制任务,无人机集群控制系统把用户任务转换为无人机控制指令,并采用基于碰撞预测的无人机集群路径规划算法和使用基于请求-响应的通信模式实现对无人机集群的控制,并实时反馈各个无人机的详细状态信息和健康状态,方便用户对无人机集群的监控。
16、与现有技术对比,本发明具备以下有益效果:
17、1、该高可靠分布式无人机集群管理系统与方法,通过利用protocol buffer序列化工具将数据文件压缩为二进制文件,使得数据文件大小降低至常见通信协议的1/3到1/10,能够在通信带宽受限情况下,实现无人机的分布式高效通信。
18、2、该高可靠分布式无人机集群管理系统与方法,通过构建无人机集群碰撞预测模型,预测所有可能发生碰撞的无人机路径,在无人机集群路径规划时提前考虑无人机碰撞,能够在无人机不发生碰撞的前提下,实现无人机与集群的最短路径规划,提高无人机路径规划的时效性,满足实时性需求。
19、3、该高可靠分布式无人机集群管理系统与方法,基于ajax的异步刷新技术,ajax通过在后台与服务器进行少量数据交换,使网页实现异步更新,减少了页面刷新的通信量,有效的减少用户等待页面刷新的时间,为用户提供良好的可视化效果。
20、4、该高可靠分布式无人机集群管理系统与方法,实现了面向无人机集群的高效监控与管理平台,具备高稳定性、高经济可承受性等特点,可提升任务执行能力,完成单机完成不好或者不能完成的任务,具有更高的经济可承受性;通过合理的布局和协同控制,能够使用分散式的低成本无人机集群系统代替成本高昂的单个复杂系统,实现更多的经济效益。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199006.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表