一种基于人工水母搜索算法的车间多AGV路径规划方法
- 国知局
- 2024-08-01 00:02:31
本发明涉及基于智能优化算法的路径规划,尤其是涉及一种基于人工水母搜索算法的车间多agv路径规划方法。
背景技术:
1、随着信息技术的飞速发展和制造型企业自身需求水平的不断提升,车间货物周转任务通过自动化设备来完成是越来越多制造型企业的重要发展趋势之一。agv作为生产车间中关键的物流设备,在控制系统的指示下,它们可以高效地完成车间内物料运输任务。然而,车间生产过程中涉及到的工位较多、物料种类较多,且车间内的路径网络纵横交错,使得多agv路径规划问题具有很高的复杂性。
2、因此,有必要提供一种基于人工水母搜索算法的车间多agv路径规划方法,来解决上述问题。
技术实现思路
1、本发明的目的是提供一种基于人工水母搜索算法的车间多agv路径规划方法,为自动化生产车间提供高效的多agv路径规划方案,从而提高车间内物料搬运效率。
2、为实现上述目的,本发明提供了一种基于人工水母搜索算法的车间多agv路径规划方法,包括以下步骤:
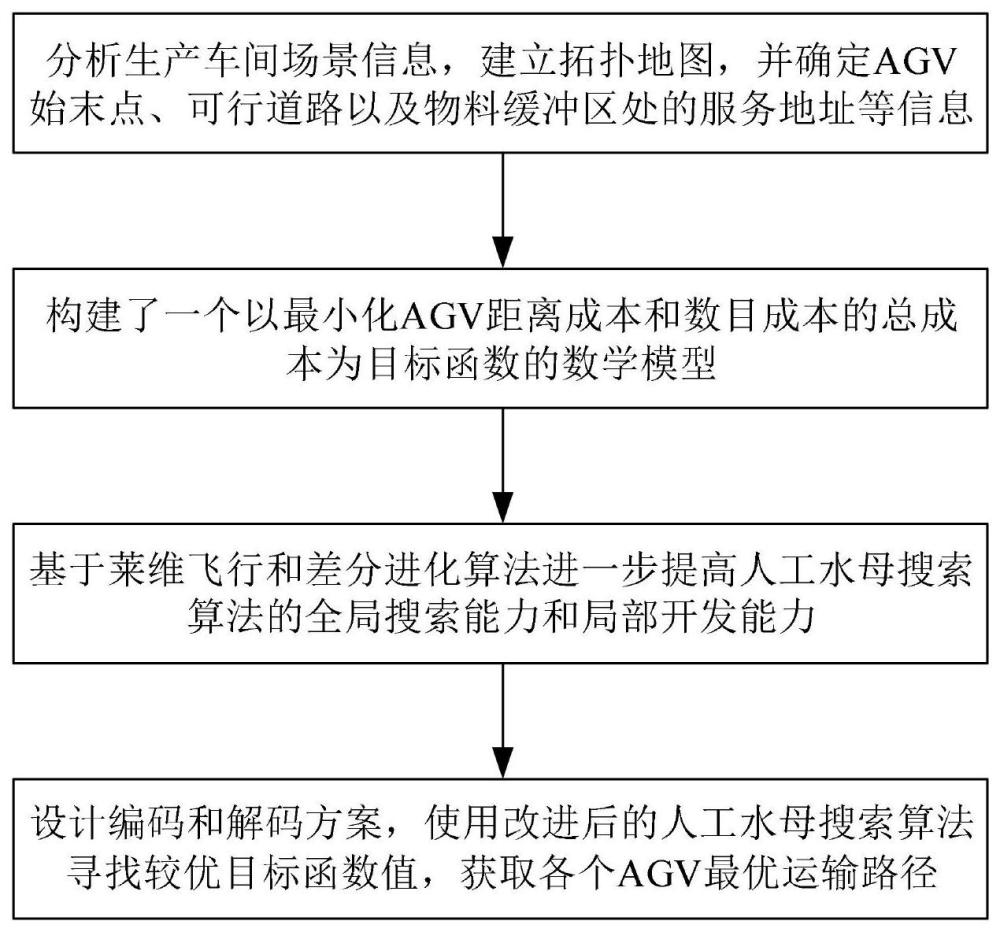
3、s1:分析生产车间场景信息,建立拓扑地图,确定agv始末点、可行道路以及物料缓冲区处的服务地址;
4、s2:构建了一个以最小化agv距离成本和数目成本的总成本为目标函数的数学模型;
5、s3:基于莱维飞行和差分进化算法进一步提高人工水母搜索算法的全局搜索能力和局部开发能力;
6、s4:设计编码和解码方案,使用改进后的人工水母搜索算法寻找较优目标函数值,获取各个agv最优运输路径。
7、优选的,在步骤s2中,数学模型如下:
8、
9、
10、
11、
12、
13、
14、
15、
16、di≥0,pi≥0,f≥0,i∈v (9)
17、用一个无向图g=(v,e)来表示agv的路径网,其中v={0}∪{1,2,...,n}代表节点的集合,{0}表示仓库,{1,2,...,n}表示生产单元,e={(i,j)|i,j∈v,i≠j}是节点之间边的集合,相邻任务间的路线使用(i,j)来表示,每条边(i,j)与从任务i到任务j的距离相关联。
18、其中,t代表任务节点的集合,满足t={1,2,...,n};c代表agv的集合,满足c={1,2,...,m};f表示agv的最大载重量;rij表示任务i到任务j的行驶距离;k表示agv索引;ca代表单位距离的运输成本,cb代表每台agv的启用成本;di表示任务i需要送的物料重量,pi表示任务i需要取的物料重量;ω表示权重系数;xijk:若agvk执行任务i之后执行任务j,则xijk=1,反之xijk=0。
19、优选的,在步骤s3中,设置种群规模npop和最大迭代次数maxiter,通过logistic混沌映射初始化种群xi(i=1,2,...,npop),将目标函数值作为适应度函数,计算水母个体适应度值f(xi),寻找个体最优位置x*=xbest;
20、通过lévyflight随机性跳动的扰动策略来满足水母跟随洋流运动或在种群内被动运动过程中扩大搜索空间的需求;
21、水母跟随洋流运动或者在种群内被动运动的位置更新如下:
22、
23、
24、其中,xi(t)和xi(t+1)分别代表第i只水母个体在第t和第t+1代的位置,代表洋流方向;α∈[0,1]代表步长参数,为逐项乘;
25、由mantegna提供的lévy分布的步长s如下所示:
26、
27、其中,代表水母移动的方向;
28、
29、其中,τ=1.5;u和v服从正态分布;
30、时间控制机制实现水母跟从洋流和水母在种群内运动之间的转换,如下所示:
31、
32、其中maxiter为迭代次数的最大值;
33、基于de/rand/1的变异方式,从每一次迭代的种群中选出三个水母个体xr1,g、xr2,g和xr3,g,通过下式得到变异个体vi,g;
34、
35、式中,r1≠r2≠r3≠i且i=1,2,...,np;g为进化代数;f为缩放因子;
36、将变异操作生成的个体与当前个体进行交叉操作,产生成测试向量ui,而后将所生成的测试向量ui与目标向量xi所对应的个体适应度值大小进行比较,选出更优个体。
37、优选的,在步骤s4中,为建立待求解的离散问题与该算法之间的耦合关系,重新设计一种实数编码方式:
38、为每一个agv和所有任务之间设置一个对应的实数编码x,x={xij|0<xij<1,i=1,2,...,n,j=1,2,...,m},其中xij代表agv与任务之间匹配的优先级,n为agv编号,m为任务编号,按照实数从小到大的顺序,依次将任务分配给对应的agv,已被分配的任务所在列设置为无穷大。
39、设计如下解码方案:
40、s41:初始化agv的位置、agv抵达任务的时间、agv完成所分配任务的时间、agv累计载重、整个行驶空间的时空标记和任务分配标记;
41、s42:获取未被分配的任务列表;
42、s43:根据agv与任务之间匹配的优先级,将未被分配的任务与满足约束条件的agv进行匹配,为每个agv生成初始任务列表;
43、s44:获取各个agv初始任务列表,根据任务已设置的优先级,在满足约束的前提下,以优先级高优先被服务为原则,生成并返回新的任务列表;
44、s45:获取当前agv所在位置和任务列表中任务的位置,依据曼哈顿距离计算最短路径,更新步骤s41的值;
45、s46:检查所有任务是否已被分配给agv,分配完成,执行步骤s47,若未完全分配,执行步骤s42;
46、s47:根据agv与任务分配结果和路径规划结果,计算目标函数值。
47、因此,本发明采用上述一种基于人工水母搜索算法的车间多agv路径规划方法,可以解决多品种小批量生产车间中多agv路径规划问题,在满足高优先级任务被优先执行的前提下最小化agv的运输成本,有效提高物料运输效率。
48、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:1.一种基于人工水母搜索算法的车间多agv路径规划方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种基于人工水母搜索算法的车间多agv路径规划方法,其特征在于:在步骤s2中,数学模型如下:
3.根据权利要求1所述的一种基于人工水母搜索算法的车间多agv路径规划方法,其特征在于:在步骤s3中,设置种群规模npop和最大迭代次数maxiter,通过logistic混沌映射初始化种群xi(i=1,2,...,npop),将目标函数值作为适应度函数,计算水母个体适应度值f(xi),寻找个体最优位置x*=xbest;
4.根据权利要求1所述的一种基于人工水母搜索算法的车间多agv路径规划方法,其特征在于:在步骤s4中,为建立待求解的离散问题与该算法之间的耦合关系,重新设计一种实数编码方式:
技术总结本发明公开了一种基于人工水母搜索算法的车间多AGV路径规划方法,涉及基于智能优化算法的路径规划技术领域,包括以下步骤:S1:分析生产车间场景信息,建立拓扑地图,确定AGV始末点、可行道路以及物料缓冲区处的服务地址;S2:构建了一个以最小化AGV距离成本和数目成本的总成本为目标函数的数学模型;S3:基于莱维飞行和差分进化算法进一步提高人工水母搜索算法的全局搜索能力和局部开发能力;S4:设计编码和解码方案,使用改进后的人工水母搜索算法寻找较优目标函数值,获取各个AGV最优运输路径。本发明采用上述的一种基于人工水母搜索算法的车间多AGV路径规划方法,为自动化生产车间提供高效的多AGV路径规划方案,提高车间内物料搬运效率。技术研发人员:吴庆涛,陈小洁,张明川,郑瑞娟,赵旭辉,朱军龙,冀治航,刘牧华,冯嘉美,王琳受保护的技术使用者:河南科技大学技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240730/199509.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表