一种应用于扑动飞行装置的控制和侦测系统的优化方法
- 国知局
- 2024-08-01 00:14:44
本发明涉及扑翼飞行装置控制技术、低功耗蓝牙传输技术、信息采集技术和图像处理相关领域,具体为一种应用于扑动飞行装置的控制和侦测系统的优化方法。
背景技术:
1、自然界中的昆虫和蜂鸟飞行能力极其出色,它们大小从几公分到几十公分不等,隐蔽性强,噪音小。能够完成垂直起降、低速飞行和空中悬停等固定翼飞行装置难以实现的飞行动作。这些飞行特性对于一些领域至关重要。因此一种基于新概念、新技术、新材料的微型扑翼飞行器研究被提出,这种技术旨在模拟昆虫与蜂鸟的飞行原理,复现这些生物优良的飞行特性来完成低空与室内侦察、目标精确打击、环境监测、自然灾害预警、野外作业勘探等工作。
2、与传统飞行装置相比,微型扑翼飞行装置具有更好的机动性和隐蔽性,因此能够在一些特定领域发挥不可或缺的作用。但是微型扑翼飞行装置升力与操控力矩的产生方式与固定翼飞行装置不同,因此不能使用传统的飞行控制理论,控制方法只能提出新型控制方案,而且由于微型扑翼飞行装置本身一直在高频扑动,飞行器在采集视频信息的时候图像也会模糊,因此需要特定的视频处理技术对采集到的图像信息进行处理。
技术实现思路
1、为解决上述问题,本发明公开了一种应用于扑动飞行装置的控制和侦测系统的优化方法,该系统包含三部分,分别为飞行装置机载板、动作捕捉系统以及上位机。本发明的优点在于:采用了模糊pid算法,弥补了飞行装置运动学建模的误差;增加了动作捕捉系统使得飞行装置实时定位操控性能得到提升;机载板实现对环境信息的采集,拓展了其实用性与功能性;图像处理时采用图像去抖算法,解决了图像模糊问题。
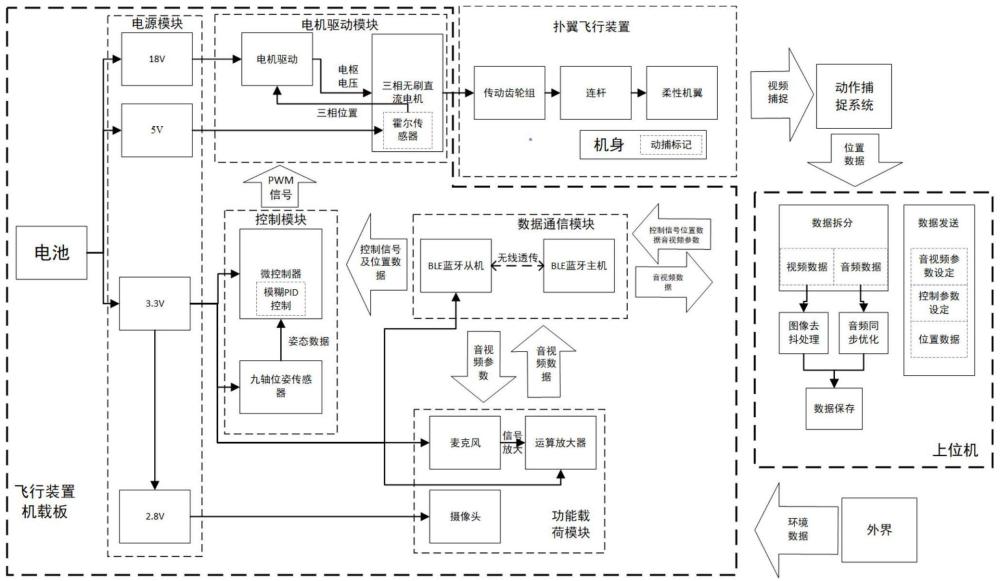
2、所述侦测和控制系统包含三部分,分别为飞行装置机载板、动作捕捉系统以及上位机。飞行装置机载板主要接收来自上位机的控制信号、音视频参数以及位置数据并借由内部的功能载荷模块接收飞行装置周边环境数据,向飞行装置输出稳定的动力;动作捕捉系统主要接收来自飞行装置机身上动捕标记反馈的位置数据并将这一数据向上位机发送;上位机主要接收来自机载板上的音视频数据并向机载板发送控制信号、音视频参数以及位置数据。该系统主要完成对飞行装置的控制以及对周围环境的侦测。飞行装置机载板上主要由电源模块、电机驱动模块、控制模块、数据通信模块、以及功能载荷模块组成。电源模块外部连接电池,向控制模块,电机驱动模块,数据通信模块以及功能载荷模块提供电源,控制模块向电机驱动模块提供pwm信号,电机驱动模块向扑翼飞行装置提供电机转动的动力,数据通信模块向控制模块提供位置数据以及位置数据,向功能载荷模块提供音视频参数,向上位机提供音视频数据并接收来自上位机的控制信号位置数据以及音视频参数,功能载荷模块向数据通信模块提供音视频数据。飞行装置机载板主要负责完成对飞行装置的控制,对外界环境数据的采集以及上位机的通信。飞行机载板上的核心模块为控制模块,控制模块由微控制器和九轴位姿传感器组成。九轴位姿传感器将飞行装置的偏航角,滚转角和俯仰角的姿态数据传输给微控制器,微控制器根据接收到的控制信号更改飞行装置的期望位置与姿态,然后根据位置数据与姿态数据,结合模糊pid算法,向电机驱动模块输出占空比可调的pwm信号。控制模块的主要功能为接收控制信号控制飞行装置完成期望控制。电源模块内部由功耗直流升压转换器以及不同型号的低功耗降压稳压器组成,电池供电经过这些低功耗直流升压转换器以及不同型号的低功耗降压稳压器后为电机驱动模块、控制模块、数据通信模块以及功能载荷模块提供所需电源。电源模块的主要功能即为机载板上的不同功能部分提供稳定的电源。电机驱动模块内部由电机驱动电路和高性能微型电机组成。接收到的电源分别为高性能微型电机内部的霍尔传感器与电机驱动电路供电。霍尔传感器感知电机内部线圈位置变化将信息传给电机驱动电路。综合来自控制模块的pwm信号,使得电机驱动电路向高性能微型电机提供可控的能源。电机之后将动力经由齿轮组与传动杆传输给柔性机翼。电机驱动模块的主要功能为飞行装置提供动力。数据通信模块内部主要包含两块ble蓝牙芯片,其中ble蓝牙从机集成在机载板上,由板上电源模块供电,ble蓝牙主机作为接受机载板信号的基站与上位机连接,由上位机供电。机载板上的两块ble蓝牙芯片之间通过无线透传的方式完成位置数据,控制信号,音视频数据,音视频参数等在机载板与上位机之间的交换。其中位置数据与轨迹控制信号传输给控制模块,音视频参数传输给功能载荷模块并接收功能载荷模块传输回来的音视频数据。数据通信模块主要负责机载板与上位机之间的数据交换。功能载荷模块内部由微型麦克风,运算放大器以及微型摄像头组成。麦克风、运算放大器与摄像头均均由板上电源模块供电。麦克风采集音频信号后传输给运算放大器将信号直接传输到通信模块,摄像头采集视频数据后传给数据通信模块进行处理。功能载荷模块的主要用来采集外界环境数据。动作捕捉系统通过视频识别飞行装置机身上的标定点将位置数据传输给上位机。上位机外部连接机载板上的数据通信模块与动作捕捉系统,内部主要功能包含数据拆分,数据发送,音视频数据处理以及数据保存,数据拆分是上位机接收到机载板数据后将接收到的数据拆分为视频数据和音频数据。数据发送是上位机将位置数据与控制设定参数,音视频设定参数打包后经过ble蓝牙主机发送给ble蓝牙从机。音视频处理是在接收到拆分好的数据后,音频数据经过归一化滤波去除指定频段后播放,视频数据经过图像去抖算法后同步音频信号输出到图像控件显示。数据保存是指选择是否将这些数据保存到指定文件夹。上位机的主要功能是将飞行装置的环境实时可视化的传递到操作者面前,并根据记录的信息实时调整飞行装置控制参数与音视频参数。
3、所述飞行装置机载板上软件处理流程在stm32微控制器,九轴位姿传感器以及ble蓝牙芯片完成,stm32微控制器接收九轴位姿传感器的三轴角度信号以及来自ble蓝牙芯片的期望轨迹和置数据,向机械结构输出可控的动力;九轴位姿传感器向stm32微控制器发送三轴角度信号,测量来自飞行装置的姿态信号;ble蓝牙芯片接收来自音频模块,图像模块的音视频数据,完成与上位机的数据交换。该流程展示了飞行装置机载板上姿态控制流程以及数据交换。九轴位姿传感器和stm32微控制器中主要负责飞行装置的控制,其主要流程为:首先stm32微控制器通过uart接口接收来自ble蓝牙芯片位置数据和控制信号,控制信号更新飞行装置的期望值,之后直接与得到的实时位置数据作比较经过位置控制器输出到下一级。期望轨迹与位置数据的误差用作模糊控制器1的输入更新位置控制器的比例微分积分系数。姿态数据通过i2c接口接收来自九轴位姿传感器传输的姿态数据并与上一级输出的参数作比较后传入姿态控制器。上级信号与姿态数据的误差用作模糊控制器2的输入并更新姿态控制器的比例微分积分系数。姿态控制器的输出为力矩信号经过电机转速逆变换即转速-力矩方程以及转速-电压方程将输出的力矩信号转换为所需要的电压信号,根据电压信号计算所需要的pwm参数之后触发定时器中断并修改pwm参数进而输出期望的电压控制信号。在九轴位姿传感器当中,其在机载板重心位置通过内置的加速度计、磁力计以及陀螺仪测得数据后经过数字滤波得到三轴角速度,之后将三轴角速度输入到dmp运动处理器经过四元数算法输出三轴欧拉角并通过i2c接口传递给stm32微控制器。这个流程主要完成对飞行装置的姿态控制。ble蓝牙芯片主要负责音视频数据的处理以及指令信号的拆分。音频模块通过adc接口将音频数据传入,图像模块通过spi接口传入图像,为了区分图像数据与音频数据需要在数据包中加入校验码,之后ble蓝牙芯片以校验码,图像数据,校验码,音频数据的顺序将音视频数据整体打包为蓝牙发送的一个数据包,之后以无线透传的方式传输给蓝牙主机。ble蓝牙芯片还会处理来自上位机的数据包,以不同的校验码拆分后将期望轨迹与位置数据通过uart接口传输给stm32微控制器,将视频参数通过i2c接口传输给视频模块设定对应寄存器的值,音频参数通过定时器修改adc接口的采样参数以此改变音频数据形式。这里主要完成了与上位机的数据交换。
4、所述上位机主要实现了数据包的拆分,数据包发送,音频优化同步与图像去抖处理。软件运行时首先配置visa资源建立usb传输通道,发送数据时以动捕系统通过hdmi端口传输的位置数据,输入的期望轨迹,音频参数,视频参数组合为一个数据包通过usb端口传输给ble蓝牙主机发送给机载板上的ble蓝牙从机。对于通过usb端口接收到的数据,首先进行数据拆分,在传输回来的数据包当中查询校验码,找到之后标志位置1并继续查找第二个相同的校验码,找到第二个效验码后,若标志位同时为1则将两个效验码之间的数据传入待处理队列,在队列中的数据继续查找音频校验码,音频校验码之前为图像数据,之后为音频数据。分别将两部分数据传输到音频优化同步部分和图像去抖处理部分。音频数据进入处理队列后回首先判断音频数据量是否达标,若没有达标则继续接收数据,此处是为了将音频与视频同步。当数据量达标之后对数据幅值进行归一化处理,使得音频数据由原先在3.3v/2上下波动转换为范围在1与-1之间围绕0来回变动的数据,之后经过butterworth滤波器,将指定范围的高低频信号过滤即可得到经过同步优化的音频数据信号,最后配置声音输出设备后播放声音。拆分后的图像数据经过图像处理显示,最后将播放完毕的数据保存在本地文件中并监听停止采集按钮,若停止采集按钮按下则结束程序,若停止采集按钮没有按下,则重复上述流程。上位机主要完成了对数据的处理显示以及和飞行装置机载板进行数据交换。
5、所述图像去抖处理流程可以大致分为帧数判断,角点检测,光流计算,混合滤波,图像显示。具体流程为拆分后的图像数据进入图像缓存队列首先判定在缓存的数据是否大于2帧,因为后续处理所需数据量至少为两帧图像的数据量。基于队列特性,我们将先进入队列的图像称为原始帧,在原始帧后进入队列的图像称为连续帧,同时对原始帧与连续帧进行shi-tomasi角点检测,用这种方式将两帧图像中的即使图像抖动仍能保持其原有属性的点标记出来,再用lucas-kanade光流算法以每帧图像中的角点估算两帧图像的象素点移动,之后利用这个估计与连续帧,对原始帧中的角点进行优化,剔除错误角点。之后可利用优化后的两帧参数代入放射变换模型可以计算出运动参数,利用卡尔曼滤波器与低通滤波器去除参数中的高斯白噪声和高斯色噪声得到平滑的运动参数,之后用平滑运动参数对原始帧的做仿射变换得到稳定的平滑帧,之后将这一帧释放到imaq图像处理控件中做图像显示。最后图像数据进入数据缓存等待保存。该模块主要完成对图像数据的操作,实现了视频播放的去抖化处理。
6、本发明的有益效果:
7、1、飞行装置的控制算法采用了模糊pid算法,针对扑翼飞行装置本身运动学与动力学模型不够精确的问题做出了适应,同时利用定常空气学模型对扑翼飞行装置所受力与力矩做出定量计算,使得扑翼飞行装置能够实现更好的控制。
8、2、系统增加了动作捕捉系统对飞行装置位置进行实时定位,增加了位置环控制器,使得飞行装置的操控性能得到了提升。
9、3、机载板集成了通信与音视频模块,能够实现对环境信息的采集。增加了扑翼飞行装置的应用场景,拓展了其实用性与功能性。
10、4、图像处理时采用图像去抖算法,并结合混合滤波的方式,解决了扑翼飞行装置在采集图象时,由于翅膀扑动导致的图像模糊问题,调整滤波参数还可以增加其使用范围。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200213.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。