控制装置、车辆、多面体控制器及其控制方法与流程
- 国知局
- 2024-08-01 00:15:45
本技术涉及智能控制,尤其涉及一种控制装置、车辆、多面体控制器及其控制方法。
背景技术:
1、作为一种简单易控的控制器,魔方控制器等多面体控制器逐渐被应用在越来越多的智能控制场景中,以实现对场景中设备的控制。多面体控制器能够对自身位置和姿态情况进行检测,根据自身位置和姿态的变化确定移动轨迹,据此确定用户的操作轨迹,进而确定用户的操作意图,发出控制指令。
2、然而,在实际应用过程中,多面体控制器状态的变化可能是由应用场景本身不稳定引起的,例如多面体控制器设置于行驶的交通工具内,交通工具本身行驶状态发生改变;也有可能是用户不慎移动造成的。在这些情况下,多面体控制器状态的变化实际上并不能体现出用户实际的控制意图,导致误触发多面体控制器。
技术实现思路
1、本技术提供一种多面体控制器的控制方法和多面体控制器,以降低误触发多面体控制器的风险。
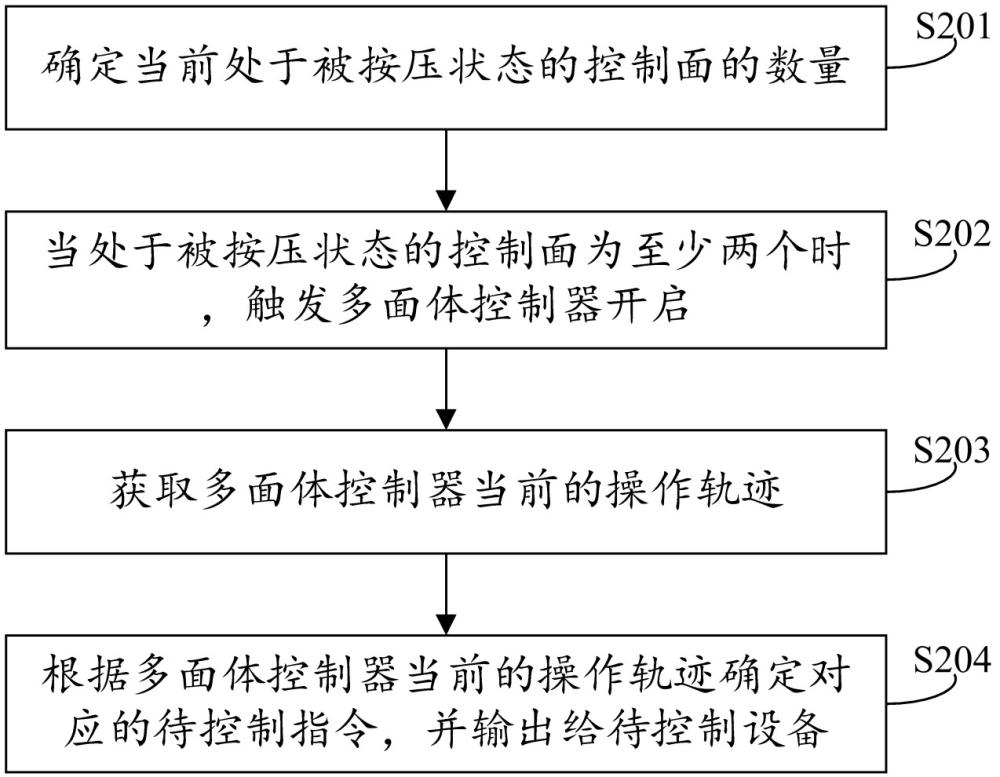
2、本技术提供一种多面体控制器的控制方法,多面体控制器包括多个控制面;控制方法包括:确定当前处于被按压状态的控制面的数量;当处于被按压状态的控制面为至少两个时,触发多面体控制器开启;获取多面体控制器当前的操作轨迹;根据多面体控制器当前的操作轨迹确定对应的待控制指令,并输出给待控制设备。
3、在一些实施例中,确定当前处于被按压状态的控制面的数量,包括:获取处于被按压状态的控制面的指纹信息;根据指纹信息确定当前处于被按压状态的控制面的数量。
4、在一些实施例中,获取处于被按压状态的控制面的指纹信息之后,还包括:根据指纹信息确定与指纹信息对应的控制权限信息;根据多面体控制器当前的操作轨迹确定对应的待控制指令,包括:根据控制权限信息和当前的操作轨迹确定待控制指令。
5、在一些实施例中,根据指纹信息确定与指纹信息对应的控制权限信息,包括:根据指纹信息确定用户身份信息;确定与用户身份信息对应的控制权限信息。
6、在一些实施例中,控制权限信息包括当前用户的可控设备信息、与可控设备对应的可执行指令和操作轨迹的匹配规则信息;根据控制权限信息和当前的操作轨迹确定待控制指令,包括:根据匹配规则信息,确定多面体控制器当前的操作轨迹对应的可执行指令,作为待控制指令。
7、在一些实施例中,控制权限信息包括当前用户的可控设备信息和与可控设备对应的可执行指令;根据控制权限信息和当前的操作轨迹确定待控制指令,包括:获取操作轨迹与控制指令之间的匹配规则;根据操作轨迹与控制指令之间的匹配规则,确定与当前的操作轨迹对应的控制指令;判断控制指令是否属于可执行指令;若控制指令属于可执行指令,则确定控制指令为待控制指令。
8、在一些实施例中,确定当前处于被按压状态的控制面的数量,包括:获取各控制面的压力信息,并根据压力信息确定当前处于被按压状态的控制面的数量。
9、在一些实施例中,根据压力信息确定当前处于被按压状态的控制面的数量,包括:当压力信息大于或等于设定的压力阈值时,确定对应的控制面当前处于被按压状态。
10、在一些实施例中,获取多面体控制器当前的操作轨迹,包括:获取处于被按压状态的控制面的用户指纹信息;根据用户指纹信息,确定当前用户是否具有控制多面体控制器的控制权限;在当前用户具有控制多面体控制器的控制权限的情况下,获取多面体控制器当前的操作轨迹。
11、在一些实施例中,多个体控制面包括响应控制面和非响应控制面;当处于被按压状态的控制面为至少两个时,获得多面体控制器的操作轨迹,包括:确定处于被按压状态的控制面是否包括响应控制面;在处于被按压状态的控制面为至少两个且包括响应控制面的情况下,触发多面体控制器开启。
12、在一些实施例中,多个控制面分别用于控制不同的可控设备;触发多面体控制器开启之后,控制方法还包括:将当前符合设定朝向的控制面所对应的可控设备作为待控制设备。
13、在一些实施例中,将当前符合设定朝向的控制面所对应的可控设备作为待控制设备之后,还包括:当处于被按压状态的控制面的数量由至少两个转变为小于两个时,触发多面体控制器关闭,以解除对待控制设备控制;或,当设定时长内未能获取到多面体控制器的操作轨迹时,触发多面体控制器关闭,以解除对待控制设备的控制。
14、在一些实施例中,获取多面体控制器当前的操作轨迹,包括:获得多面体控制器的第一运动轨迹数据,和,与多面体控制器电连接的车辆的第二运动轨迹数据;根据第一运动轨迹数据和第二运动轨迹数据,确定多面体控制器的操作轨迹。
15、在一些实施例中,根据第一运动轨迹数据和第二运动轨迹数据,确定多面体控制器的操作轨迹,包括:对第一运动轨迹数据和第二运动轨迹数据进行时间同步,并将完成时间同步的第一运动轨迹数据记为第一同步轨迹数据,将完成时间同步的第二运动数据记为第二同步轨迹数据;根据第一同步轨迹数据和第二同步轨迹数据,确定多面体控制器的操作轨迹。
16、在一些实施例中,对第一运动轨迹数据和第二运动轨迹数据进行时间同步,包括:对第一运动轨迹数据和第二运动轨迹数据进行降噪处理,并将经过降噪处理的第一运动轨迹数据记为第一中间轨迹数据,将经过预处理的第二运动轨迹数据记为第二中间轨迹数据;通过设定算法计算得到第一中间轨迹数据和第二中间轨迹数据之间的延迟时长;根据延迟时长校准第一中间轨迹数据和第二中间轨迹数据,以使第一中间轨迹数据和第二中间轨迹数据同步。
17、在一些实施例中,通过设定算法计算得到第一中间轨迹数据和第二中间轨迹数据之间的延迟时长,包括:通过第一设定算法和第二设定算法中的至少一者得到第一中间轨迹数据和第二中间轨迹数据的延迟时长;其中,第一设定算法为线性算法,第二设定算法为非线性算法。
18、在一些实施例中,通过第一设定算法和第二设定算法得到第一中间轨迹数据和第二中间轨迹数据之间的延迟时长,包括:通过第一设定算法得到第一中间轨迹数据和第二中间轨迹数据的延迟时长,记为第一延迟时长;判断第一延迟时长是否满足稳定性要求;若第一延迟时长满足稳定性要求,则确定第一延迟时长为第一中间轨迹数据和第二中间轨迹数据的延迟时长;若第一延迟时长不满足稳定性要求,则通过第二设定算法得到第一中间轨迹数据和第二中间轨迹数据之间的延迟时长。
19、在一些实施例中,判断第一延迟时长是否满足稳定性要求,包括:将第一延迟时长录入延迟时长记录表,延迟时长记录表中记录有多个历史延迟时长;确定延迟时长记录表中第一延迟时长和所有历史延迟时长的方差;若方差小于或等于方差阈值,则确定第一延迟时长满足稳定性要求;若方差大于方差阈值,则确定第一延迟时长不满足稳定性要求。
20、在一些实施例中,第一设定算法包括互相关函数算法;通过第一设定算法确定第一中间轨迹数据和第二中间轨迹数据的延迟时长,包括:计算第一中间轨迹数据和第二中间轨迹数据的互相关函数,其中互相关函数的因变量为时长;确定使互相关函数的函数值最大的时长为延迟时长。
21、在一些实施例中,确定使互相关函数的函数值最大的时长为延迟时长,包括:向互相关函数多次赋值,并比较多次赋值对应的互相关函数的函数值,以确定使互相关函数的函数值最大的时长,记为校准时长;若校准时长为多次赋值中的边界值,则扩大赋值范围,直至得到使互相关函数的函数值最大、且为非边界值的时长,确定为延迟时长。
22、在一些实施例中,第二设定算法包括动态时间规整算法;通过第二设定算法计算第一中间轨迹数据和第二中间轨迹数据的延迟时长,包括:构造第一中间轨迹数据和第二中间轨迹数据的累积距离矩阵;寻找累积距离矩阵中起始点数据与终点数据之间的最佳路径,以使沿最佳路径的累积距离最小;根据累积距离矩阵的最佳路径确定延迟时长。
23、在一些实施例中,对第一运动轨迹数据和第二运动轨迹数据进行降噪处理,包括:对第一运动轨迹数据和第二运动轨迹数据分别进行滤波处理、幅度归一化处理和差分计算。
24、在一些实施例中,根据延迟时长校准第一中间轨迹数据和第二中间轨迹数据之后,还包括:对第一中间轨迹数据和第二中间轨迹数据进行滤波处理。
25、在一些实施例中,根据第一同步轨迹数据和第二同步轨迹数据确定多面体控制器的操作轨迹,包括:计算第一同步轨迹数据和第二同步轨迹数据的矢量差,作为多面体控制器的操作轨迹。
26、本技术提供一种控制装置,包括一个或多个处理器,用于实现上述的多面体控制器的控制方法。
27、本技术提供一种车辆,包括上述的控制装置。
28、本技术提供一种多面体控制器,多面体控制器包括多个控制面,且至少部分控制面设置有指纹识别模块,指纹识别模块用以获取指纹识别模块所在控制面的用户身份信息。
29、本技术的提供的多面体控制器的控制方法,先确定当前处于被按压状态的控制面的数量,在处于被按压状态的控制面为两个以上的情况下,再触发多面体控制器开启,以进行获取操作轨迹、根据操作轨迹确定待控制指令并输出给待控制设备的过程。这样,增加对开启多面体控制器的条件限制,能够有效降低误触发多面体控制器的风险。同时,以处于被按压状态的控制面的数量作为开启多面体控制器的条件,不会给正常的使用过程增加任何多余的步骤,在降低误触风险的同时保证用户使用的便捷性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200308.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表