升降运动装置以及智能设备的制作方法
- 国知局
- 2024-08-01 00:15:39
本申请涉及割草机器人的,尤其涉及一种升降运动装置以及智能设备。
背景技术:
1、割草机器人是一种用于自动修剪草坪的智能设备,能够代替用户执行割草工作,解放了用户的劳动力。割草机器人的底部设置有能够旋转的刀盘,在割草时,割草机器人控制刀盘高速旋转,从而能够实现割草的目的。
2、目前,在相关技术中,割草机器人的刀盘仅能自动旋转,针对不同的草坪或者不同的割草需求,需要用户手动调整刀盘的高度,从而达到不同的割草效果,例如在草坪上割出花纹,或者调整割草的深浅。
3、然而,在割草机器人执行割草工作的过程中,如需对刀盘的高度进行调整,需要暂时停止割草机器人的工作,等待用户手动调整完毕后,才能继续割草,降低了割草机器人的工作效率。
技术实现思路
1、本申请提供一种升降运动装置以及智能设备,以解决需要等待用户手动调整完毕后,才能继续割草,降低了割草机器人的工作效率的问题,实现了提高智能设备的工作效率的目的。
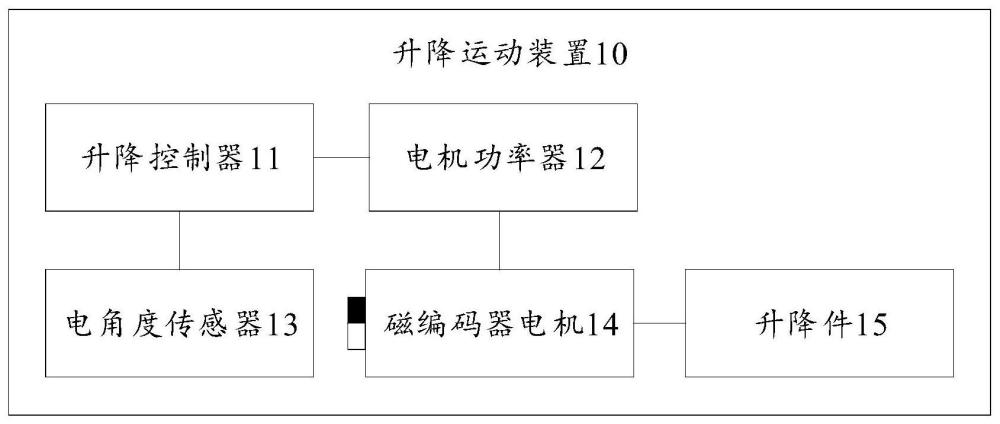
2、第一方面,本申请提供一种升降运动装置,包括:升降控制器、电机功率器、电角度传感器、磁编码器电机以及升降件。
3、其中,所述升降控制器的输出端与所述电机功率器的输入端电连接,所述电机功率器的输出端与所述磁编码器电机的控制端电连接,所述电角度传感器与所述磁编码器电机中的磁铁平行设置,所述磁编码器电机还与所述升降件机械连接。
4、所述升降控制器,用于接收升降指令,所述升降指令用于指示调整所述升降件的升降高度和升降方向,且响应于所述升降指令,确定所述磁编码器电机的第一转动角度和第一转动方向,并向所述电机功率器发送第一指令,所述第一指令用于指示所述第一转动角度和所述第一转动方向。
5、所述电机功率器,用于根据所述第一指令,控制所述磁编码器电机沿着所述第一转动方向转动,以带动所述升降件沿所述升降方向运动。
6、所述电角度传感器,用于在所述磁编码器电机的转动过程中,根据所述磁铁引起的磁场变化情况,确定所述磁编码器电机的第二转动角度和第二转动方向,并向所述升降控制器发送所述第二转动角度和所述第二转动方向。
7、所述升降控制器,还用于在所述第二转动角度与所述第一转动角度相等,且所述第二转动方向与所述第一转动方向相同时,向所述电机功率器发送第二指令,所述第二指令用于指示所述磁编码器电机停止转动。
8、所述电机功率器,还用于根据所述第二指令,控制所述磁编码器电机停止转动至所述第一转动角度,以带动所述升降件运动至所述升降高度。
9、通过第一方面提供的升降运动装置,升降控制器响应于升降指令,确定磁编码器电机的第一转动角度和第一转动方向,从而向电机功率器发送第一指令,使得电机功率器获知第一转动角度和第一转动方向,电机功率器根据第一转动角度和第一转动方向控制磁编码器电机转动,从而带动与磁编码器电机机械连接的升降件运动,电角度传感器通过检测磁编码器电机上的磁铁,实时监测磁编码器电机的第二转动角度,并向磁编码器电机发送第二转动角度和第二转动方向,从而使得升降控制器获知磁编码器电机已经转动的角度,在第二转动角度等于第一转动角度时,升降件已经到达所需的高度,升降控制器向电机功率器发送第二指令,电机功率器根据第二指令控制磁编码器电机停止转动,从而实现自动控制升降件的升降,自动调整升降件的高度,无需人工介入手动控制升降件的高度,节省了调节升降件高度的时间,提高了智能设备的工作效率。
10、在一种可能的设计中,所述升降件为割草机器人中的刀盘。或者,所述升降件为机械臂。
11、在一种可能的设计中,所述第一转动角度小于180°。
12、在一种可能的设计中,所述磁编码器电机转动的角度与所述升降件升降的高度之间的对应关系满足如下公式:
13、
14、其中,k·a为所述磁编码器电机转动的角度,k为磁编码器的计数值,a为角度分辨率,h为每角度分辨率对应的高度,h为所述升降件升降的高度。
15、第二方面,本申请提供一种智能设备,包括:主控制器以及至少一个如上述第一方面及第一方面中任一种可能的设计中的升降运动装置。
16、其中,所述主控制器与所述升降运动装置中的升降控制器电连接。
17、所述主控制器,用于向所述升降控制器发送升降指令。
18、在一种可能的设计中,在所述智能设备为割草机器人,所述升降运动装置中的升降件为割草机器人中的刀盘时,所述主控制器,具体用于根据所述割草机器人在割草区域中的位置与所述刀盘的高度之间的关联关系,确定所述升降指令。
19、在一种可能的设计中,所述割草机器人还包括:定位传感器。
20、所述主控制器,用于通过所述定位传感器,确定所述割草机器人在割草区域中的位置。
21、在一种可能的设计中,在所述智能设备为割草机器人,所述升降运动装置中的升降件为割草机器人中的刀盘时,所述主控制器,具体用于接收用户传输的所述升降指令。
22、在一种可能的设计中,在所述升降运动装置中的升降件为机械臂时,所述主控制器,具体用于接收用户传输的所述升降指令。
23、在一种可能的设计中,所述主控制器,还用于在确定所述智能设备碰到避障物之前,确定所述升降指令。
24、在一种可能的设计中,所述升降运动装置,用于向所述主控制器发送第一信息,所述第一信息用于指示所述升降件运动至所述升降高度。
25、上述第二方面以及上述第二方面的各可能的设计中所提供的,其有益效果可以参见上述第一方面和第一方面的各可能的实施方式所带来的有益效果,在此不再赘述。
技术特征:1.一种升降运动装置,其特征在于,所述升降运动装置包括:升降控制器、电机功率器、电角度传感器、磁编码器电机以及升降件;
2.根据权利要求1所述的升降运动装置,其特征在于,所述升降件为割草机器人中的刀盘;或者,所述升降件为机械臂。
3.根据权利要求1或2所述的升降运动装置,其特征在于,所述第一转动角度小于180°。
4.根据权利要求1或2所述的升降运动装置,其特征在于,所述磁编码器电机的转动角度与所述升降件的升降高度之间的对应关系满足如下公式:
5.一种智能设备,其特征在于,所述智能设备包括:主控制器以及至少一个如权利要求1-4任一项所述的升降运动装置;
6.根据权利要求5所述的智能设备,其特征在于,在所述智能设备为割草机器人,所述升降运动装置中的升降件为割草机器人中的刀盘时,所述主控制器,具体用于根据所述割草机器人在割草区域中的位置与所述刀盘的高度之间的关联关系,确定所述升降指令。
7.根据权利要求5所述的智能设备,其特征在于,在所述智能设备为割草机器人,所述升降运动装置中的升降件为割草机器人中的刀盘时,所述主控制器,具体用于接收用户传输的所述升降指令。
8.根据权利要求5所述的智能设备,其特征在于,在所述升降运动装置中的升降件为机械臂时,所述主控制器,具体用于接收用户传输的所述升降指令。
9.根据权利要求5-8任一项所述的智能设备,其特征在于,所述主控制器,还用于在确定所述智能设备碰到避障物之前,确定所述升降指令。
10.根据权利要求5-8任一项所述的智能设备,其特征在于,所述升降运动装置,用于向所述主控制器发送第一信息,所述第一信息用于指示所述升降件运动至所述升降高度。
技术总结本申请提供一种升降运动装置以及智能设备。该装置包括:升降控制器、电机功率器、电角度传感器、磁编码器电机以及升降件。升降控制器响应于升降指令,确定磁编码器电机的第一转动角度和第一转动方向;电机功率器控制磁编码器电机沿着第一转动方向转动,以带动升降件沿升降方向运动,电角度传感器在磁编码器电机的转动过程中,根据磁铁引起的磁场变化情况,确定磁编码器电机的第二转动角度和第二转动方向,升降控制器在第二转动角度与第一转动角度相等时,向电机功率器发送第二指令,电机功率器控制磁编码器电机停止转动至第一转动角度,以带动升降件运动至升降高度。从而实现自动控制升降件的升降,提高智能设备的工作效率。技术研发人员:陶世焰,李建勇受保护的技术使用者:优思美地(上海)机器人科技有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200301.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。