无人机投放控制方法、装置、设备、存储介质及程序产品与流程
- 国知局
- 2024-08-01 00:17:57
本发明涉及无人机,特别涉及一种无人机投放控制方法、装置、设备、存储介质及程序产品。
背景技术:
1、无人机空中从载机上高速投放后,为保护机体结构不受高速气流冲击,通常将无人机置于投放舱内,载机将投放舱投放后,使用阻力伞对投放舱进行减速,当减速到一定速度时,无人机出舱。
2、但由于现有技术对阻力伞的使用,导致无人机的投放成本较高。
技术实现思路
1、本发明的主要目的是提供一种无人机投放控制方法,旨在解决现有技术中采用现有的方法,无人机空中投放需要使用阻力伞,导致无人机的投放成本较高的技术问题。
2、为实现上述目的,本发明提出一种无人机投放控制方法,用于飞行计算机设备;所述方法包括以下步骤:
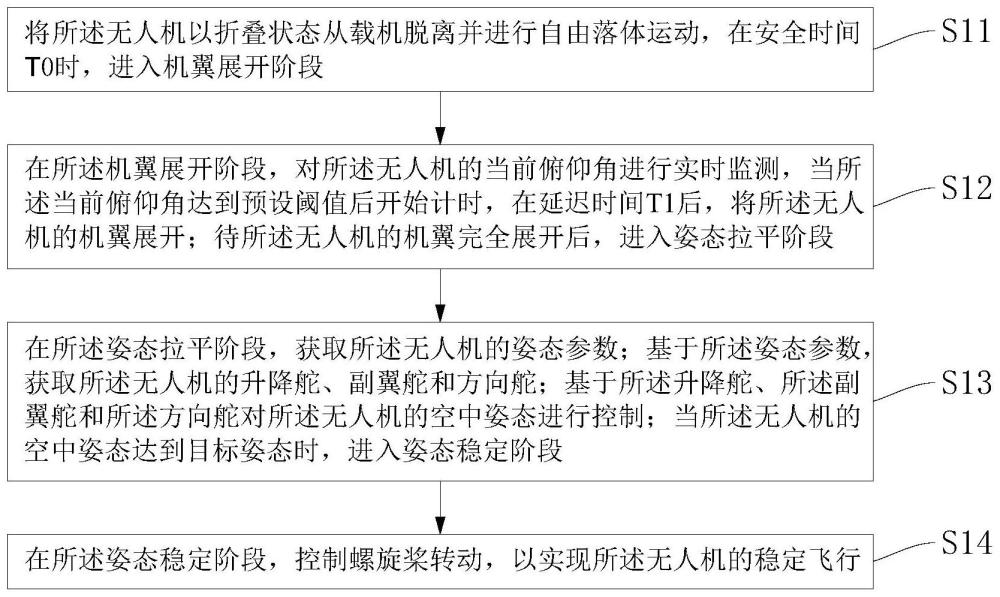
3、将所述无人机以折叠状态从载机脱离并进行自由落体运动,在安全时间t0时,进入机翼展开阶段;
4、在所述机翼展开阶段,对所述无人机的当前俯仰角进行实时监测,当所述当前俯仰角达到预设阈值后开始计时,在延迟时间t1后,将所述无人机的机翼展开;待所述无人机的机翼完全展开后,进入姿态拉平阶段;
5、在所述姿态拉平阶段,获取所述无人机的姿态参数;基于所述姿态参数,获取所述无人机的升降舵、副翼舵和方向舵;基于所述升降舵、所述副翼舵和所述方向舵对所述无人机的空中姿态进行控制;当所述无人机的空中姿态达到目标姿态时,进入姿态稳定阶段;
6、在所述姿态稳定阶段,控制螺旋桨转动,以实现所述无人机的稳定飞行。
7、可选的,所述当所述当前俯仰角达到预设阈值后开始计时,在延迟时间t1后,将所述无人机的机翼展开,包括:
8、将所述无人机的垂直尾翼展开并保持时间t2,再将所述无人机的后机翼展开并保持时间t3后,然后将所述无人机的前机翼展开并保持时间t4。
9、可选的,所述基于所述姿态参数对所述无人机的空中姿态进行控制,包括:
10、基于第一控制参数、第二控制参数、俯仰角速率指令值和俯仰角速率,获取所述升降舵;基于所述升降舵对所述无人机的俯仰姿态进行控制;
11、基于第三控制参数、第四控制参数、滚转角指令值、滚转角和滚转角速率,获取所述副翼舵;基于所述副翼舵对所述无人机的滚转进行控制;
12、基于第五控制参数和航向角速率,获取所述方向舵;基于所述方向舵对所述无人机的航向进行控制。
13、可选的,所述俯仰角速率指令值是基于第六控制参数、第七控制参数、第八控制参数、俯仰角指令值和俯仰角获取的。
14、可选的,所述基于所述姿态参数对所述无人机的空中姿态进行控制,包括:
15、基于第一控制参数、第六控制参数、第七控制参数、第八控制参数、俯仰角指令值和俯仰角,获取所述升降舵;基于所述升降舵对所述无人机的俯仰姿态进行控制。
16、可选的,所述基于所述姿态参数对所述无人机的空中姿态进行控制,包括:
17、基于第三控制参数、第四控制参数、第九控制参数、第十控制参数、滚转角速率、滚转角指令值和滚转角,获取所述副翼舵;基于所述副翼舵对所述无人机的滚转进行控制。
18、可选的,所述基于所述姿态参数对所述无人机的空中姿态进行控制,包括:
19、基于第三控制参数、第十一控制参数、滚转角速率和滚转角速率指令值,获取所述副翼舵;基于所述副翼舵对所述无人机的滚转进行控制;其中,
20、所述滚转角速率指令值是基于第四控制参数、第九控制参数、第十控制参数、滚转角指令值和滚转角获取的。
21、此外,为实现上述目的,本发明还提出了一种无人机投放控制装置,包括:
22、投放模块,用于将所述无人机以折叠状态从载机脱离并进行自由落体运动,在安全时间t0时,进入机翼展开阶段;
23、机翼展开模块,用于在所述机翼展开阶段,对所述无人机的当前俯仰角进行实时监测,当所述当前俯仰角达到预设阈值后开始计时,在延迟时间t1时,将所述无人机的机翼展开;待所述无人机的机翼完全展开后,进入姿态拉平阶段;
24、姿态拉平模块,用于在所述姿态拉平阶段,获取所述无人机的姿态参数;基于所述姿态参数获取所述无人机的升降舵、副翼舵和方向舵,基于所述升降舵、所述副翼舵和所述方向舵对所述无人机的空中姿态进行控制;当所述无人机的空中姿态达到目标姿态时,进入姿态稳定阶段;
25、姿态稳定模块,用于在所述姿态稳定阶段,控制螺旋桨转动,以实现所述无人机的稳定飞行。
26、可选的,所述姿态拉平模块包括用于获取所述姿态参数的信号传感器,所述信号传感器为陀螺仪。
27、此外,为实现上述目的,本发明还提出了一种计算机设备,该计算机设备包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序,实现如上述任一项所述无人机投放控制方法的步骤。
28、此外,为实现上述目的,本发明还提出了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,处理器执行所述计算机程序,实现如上述一项所述无人机投放控制方法的步骤。
29、此外,为实现上述目的,本发明还提出了一种计算机程序产品,所述计算机程序产品在被处理器运行时,实现如上述一项所述无人机投放控制方法的步骤。
30、本发明技术方案提出了一种无人机投放控制方法,用于计算机设备;所述方法包括以下步骤:将所述无人机以折叠状态从载机脱离并进行自由落体运动,在安全时间t0时,进入机翼展开阶段;在所述机翼展开阶段,对所述无人机的当前俯仰角进行实时监测,当所述当前俯仰角达到预设阈值后开始计时,在延迟时间t1后,将所述无人机的机翼展开;待所述无人机的机翼完全展开后,进入姿态拉平阶段;在所述姿态拉平阶段,获取所述无人机的姿态参数;基于所述姿态参数,获取所述无人机的升降舵、副翼舵和方向舵;基于所述升降舵、所述副翼舵和所述方向舵对所述无人机的空中姿态进行控制;当所述无人机的空中姿态达到目标姿态时,进入姿态稳定阶段;在所述姿态稳定阶段,控制螺旋桨转动,以实现所述无人机的稳定飞行。
31、现有方法中,需要在无人机的投放舱安装阻力伞,阻力伞的使用导致无人机投放成本较高。而利用本发明的方法,无人机在展开阶段,仅需利用无人机机翼展开时的气动阻力,即可实现对无人机的减速控制,以达到不适用阻力伞的目的,从而削减无人机空中投放的制造成本。此外,无人机在姿态拉平阶段,本申请利用姿态参数获取无人机的升降舵、副翼舵和方向舵,并基于升降舵、副翼舵和方向舵来调整无人机的空中姿态,便于控制无人机的飞行模态,降低无人机投放时飞行模态衔接的安全风险。无人机在姿态稳定阶段,本申请利用螺旋桨带动无人机稳定飞行。
技术特征:1.一种无人机投放控制方法,其特征在于,用于计算机设备;所述方法包括以下步骤:
2.如权利要求1所述的无人机投放控制方法,其特征在于,所述当所述当前俯仰角达到预设阈值后开始计时,在延迟时间t1后,将所述无人机的机翼展开,包括:
3.如权利要求1所述的无人机投放控制方法,其特征在于,所述基于所述姿态参数对所述无人机的空中姿态进行控制,包括:
4.如权利要求3所述的无人机投放控制方法,其特征在于,所述俯仰角速率指令值是基于第六控制参数、第七控制参数、第八控制参数、俯仰角指令值和俯仰角获取的。
5.如权利要求1所述的无人机投放控制方法,其特征在于,所述基于所述姿态参数对所述无人机的空中姿态进行控制,包括:
6.如权利要求1所述的无人机投放控制方法,其特征在于,所述基于所述姿态参数对所述无人机的空中姿态进行控制,包括:
7.如权利要求1所述的无人机投放控制方法,其特征在于,所述基于所述姿态参数对所述无人机的空中姿态进行控制,包括:
8.一种无人机空中投放起飞控制装置,其特征在于,包括:
9.如权利要求8所述的无人机空中投放起飞控制装置,其特征在于,所述姿态拉平模块包括用于获取所述姿态参数的信号传感器,所述信号传感器为陀螺仪。
10.一种计算机设备,其特征在于,该计算机设备包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序,实现如权利要求1-7中任一项所述的方法。
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,处理器执行所述计算机程序,实现如权利要求1-7中任一项所述的方法。
12.一种计算机程序产品,其特征在于,所述计算机程序产品在被处理器运行时,实现如权利要求1-7中任一项所述的方法。
技术总结本发明公开一种无人机投放控制方法、装置、设备、存储介质及程序产品,涉及无人机技术领域。所述方法包括以下步骤:将无人机从载机脱离并进行自由落体运动,在当前俯仰角达到预设阈值后开始计时,在延迟时间T1后,将无人机的机翼展开;待无人机的机翼完全展开后,获取无人机的姿态参数;基于姿态参数,获取无人机的升降舵、副翼舵和方向舵,并对无人机的空中姿态进行控制;当无人机的空中姿态达到目标姿态时,控制螺旋桨转动,以实现无人机的稳定飞行。上述方法利用无人机机翼展开时的气动阻力,即可实现对无人机的减速控制,以达到不适用阻力伞的目的,从而削减无人机空中投放的制造成本。技术研发人员:王庆琥,王振东,杜津铭,王毅,金涛,韩婵,普应金,金禹彤,刘明辉,尹钧受保护的技术使用者:成都飞机工业(集团)有限责任公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200498.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。