一种基于MEMS陀螺仪的伺服稳定控制方法
- 国知局
- 2024-08-01 00:18:55
本发明属于工业机器人,具体提供一种基于mems陀螺仪的伺服稳定控制方法。
背景技术:
1、现有伺服稳定控制方法中,除传统的pid控制外,还有各种高级智能算法,如鲁棒控制、神经网络控制、自适应控制等等;而在实际系统中发生的振动与机械装置、负载惯量等因素都有很大的联系,选择何种稳定控制方法能够达到更好效果并不清楚。此外,在现有的振动抑制策略中,大多数只能够在特定频率下有效抑制振动;例如,陷波器能够对高频振动具有很好的抑制效果,但前提是对振动频率进行准确探测,否则会导致振动抑制失败;又如,观测器反馈策略能够有效抑的低频振动,但如何选择合适的控制器参数并不明确;再如,被动控制中的输入整形控制运用广泛,但仅适合小惯量比的振动抑制。进一步的,电机往往需要通过减速机连接各种负载,而减速机及负载往往具有柔性环节,此时电机侧的转速波动情况并不能真实的反应负载侧的转速波动情况,导致负载侧存在转速波动大的问题。基于此,本发明提出一种基于mems陀螺仪的伺服稳定控制方法。
技术实现思路
1、本发明的目的在于提供一种基于mems陀螺仪的伺服稳定控制方法,用以实现伺服电机负载侧转速稳定控制,解决电机负载侧转速波动大等问题;本发明引入mems陀螺仪,通过采样mems陀螺仪传感数据以实现伺服稳定控制,能够针对所有频率段实现稳定控制。
2、为实现上述目的,本发明采用的技术方案为:
3、一种基于mems陀螺仪的伺服稳定控制方法,包括以下步骤:
4、步骤1. 设置陀螺仪于伺服电机的负载侧,通过陀螺仪测量负载侧的角速度;
5、步骤2. 伺服微控制单元采集陀螺仪数据、编码器数据与电机电流数据,并分别对采集数据完成数据预处理;其中,陀螺仪数据为负载侧角速度ωbe,经过数据预处理后转换为负载侧转速ω2;编码器数据为电机位置θ;电机电流数据为电机三相交流电,经数据处理后转换为直流电iq;
6、步骤3. 将数据预处理后陀螺仪数据、编码器数据与电机电流数据引入电机控制系统,完成电机控制。
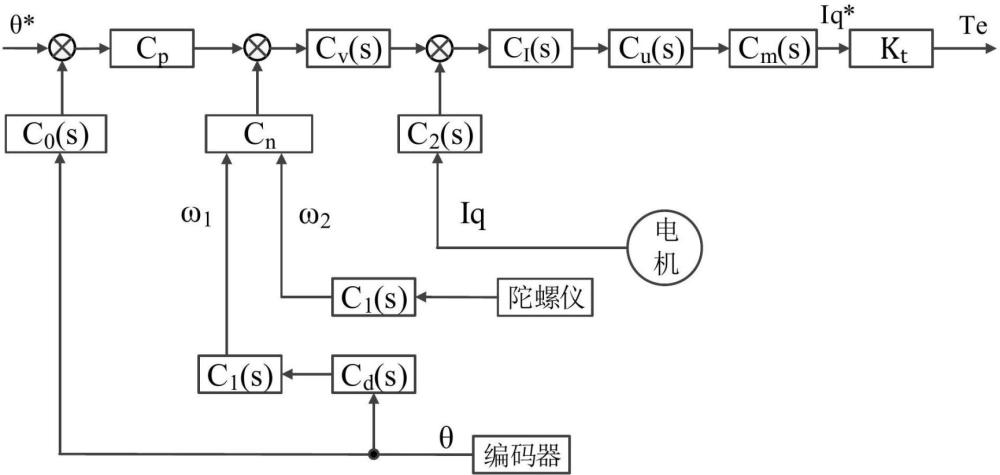
7、进一步的,步骤3中,电机控制流程为:
8、步骤3-1. 主控制器发送期望位置θ*,期望位置θ*与位置采样传递函数c0(s)的输出进行求差运算,得出偏差并输入至位置调节器cp;其中,位置采样传递函数c0(s)的输入为电机位置θ;
9、步骤3-2. 位置调节器cp的输出与转速采样比例函数cn的输出进行求差运算,得出偏差并输入至速度调节器cv(s);其中,转速采样比例函数cn(s)的输入为电机侧转速与负载侧转速;
10、步骤3-3. 速度调节器cv(s)的输出与电流采样传递函数c2(s)的输出进行求差运算,得出偏差并输入至电流调节器ci(s);其中,电流采样传递函数c2(s)的输入为直流电iq;
11、步骤3-4. 电流调节器ci(s)的输出依次经过逆变器单元cu(s)、伺服电机单元cm(s)进行运算,得到电机力矩电流iq*;
12、步骤3-5. 电机力矩电流iq*输入至电机转矩传递函数kt,得到电机电磁转矩te;
13、步骤3-6. 电机电磁转矩te驱动电机运行,电机带动负载运动。
14、更进一步的,步骤3-1中,位置采样传递函数c0(s)表示为:
15、,
16、其中,s表示复频域变量符号,tsp为位置采样延迟时间,qp为位置采样增益系数,tfp为位置滤波处理系数;
17、位置调节器cp表示为:,其中,kpp为位置调节器的比例系数。
18、更进一步的,步骤3-2中,转速采样比例函数cn表示为:
19、,
20、其中,k1为电机侧转速采样权重,k2为负载侧转速采样权重;ω1为电机侧转速,ω2为负载侧转速,由转速采样传递函数c1(s)得到;
21、转速采样传递函数c1(s)表示为:
22、,
23、其中,tsv为转速采样延迟时间,qv为转速采样增益系数,tfv为转速滤波处理系数;
24、电机侧转速由微分函数cd(s)得到,电机位置θ经过微分函数cd(s)进行微分运算,得到电机侧转速;
25、速度调节器cv(s)表示为:
26、,
27、其中,kvp为速度调节器的比例系数,tvi为速度调节器的积分时间常数。
28、再进一步的,步骤3-2中,电机侧转速采样权重k1与负载侧转速采样权重k2通过自动寻优设置,将最优权重固定设置于电机控制程序中;自动寻优的具体过程为:
29、以电机侧转速采样权重k1与负载侧转速采样权重k2为优化目标,设置电机侧转速采样权重k1与负载侧转速采样权重k2,k1的取值范围为[0.5~1];k2的取值范围为[0~0.5],设置电机侧转速采样权重k1的调节步长为0.1,设置负载侧转速采样权重k2的调节步长为0.05,对电机侧转速采样权重k1与负载侧转速采样权重k2进行参数扫描;记录每一个参数对下的负载侧角速度的绝对值|ωbe|,搜索|ωbe|的最小值,将最小值对应的参数对作为最优权重。
30、更进一步的,步骤3-3中,电流采样传递函数c2(s)表示为:
31、,
32、其中,s表示复频域变量符号,tsi为电流采样延迟时间,qi为电流采样增益系数,tfi为电流滤波处理系数;
33、电流调节器ci(s)表示为:
34、,
35、其中,kip为电流调节器的比例系数,tii为电流调节器的积分时间常数。
36、更进一步的,步骤3-4中,逆变器单元cu(s)表示为:
37、,
38、其中,tpwm为开关周期,kpwm为功率器件增益系数,tdt为死区时间;
39、伺服电机单元cm(s)表示为:
40、,
41、其中,rs为绕组电阻,lq为交轴电感。
42、更进一步的,步骤3-5中,电机转矩传递函数kt表示为:
43、,
44、其中,np为电机极对数,为永磁体磁链。
45、基于上述技术方案,本发明的有益效果在于:
46、本发明提供一种基于mems陀螺仪的伺服稳定控制方法,在伺服电机的负载侧引入陀螺仪,通过陀螺仪测量负载侧的角速度,进而采集得到负载侧转速,进一步与编码器数据(电机位置与电机侧转速)、电机电流数据共同实现伺服电机负载侧转速稳定控制,解决电机负载侧转速波动大等问题;并且,本发明能够解决全频率段稳定控制问题;同时,陀螺仪数据权重相关的控制参数通过自动寻优设置,达到稳定控制,无需人为干预。
技术特征:1.一种基于mems陀螺仪的伺服稳定控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述基于mems陀螺仪的伺服稳定控制方法,其特征在于,步骤3中,电机控制流程为:
3.根据权利要求2所述基于mems陀螺仪的伺服稳定控制方法,其特征在于,步骤3-1中,位置采样传递函数c0(s)表示为:
4.根据权利要求2所述基于mems陀螺仪的伺服稳定控制方法,其特征在于,步骤3-2中,转速采样比例函数cn表示为:
5.根据权利要求4所述基于mems陀螺仪的伺服稳定控制方法,其特征在于,步骤3-2中,电机侧转速采样权重k1与负载侧转速采样权重k2通过自动寻优设置,将最优权重固定设置于电机控制程序中;自动寻优的具体过程为:
6.根据权利要求2所述基于mems陀螺仪的伺服稳定控制方法,其特征在于,步骤3-3中,电流采样传递函数c2(s)表示为:
7.根据权利要求2所述基于mems陀螺仪的伺服稳定控制方法,其特征在于,步骤3-4中,逆变器单元cu(s)表示为:
8.根据权利要求2所述基于mems陀螺仪的伺服稳定控制方法,其特征在于,步骤3-5中,电机转矩传递函数kt表示为:
技术总结本发明属于工业机器人技术领域,具体提供一种基于MEMS陀螺仪的伺服稳定控制方法,用以实现伺服电机负载侧转速稳定控制,解决电机负载侧转速波动大等问题;首先,引入MEMS陀螺仪,设置陀螺仪于伺服电机的负载侧,通过陀螺仪测量负载侧的角速度;然后,伺服微控制单元采集上一时刻的陀螺仪数据、编码器数据与电机电流数据,并分别对采集数据完成数据预处理;最后,将数据预处理后陀螺仪数据、编码器数据与电机电流数据引入电机控制系统,完成当前时刻电机控制。综上,本发明引入MEMS陀螺仪,结合陀螺仪数据、编码器数据与电机电流数据实现伺服稳定控制,能够针对所有频率段实现稳定控制。技术研发人员:项勤建,蒋亚东,陈超受保护的技术使用者:电子科技大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240730/200558.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。