一种基于纯跟踪的自动泊车纵向控制方法与流程
- 国知局
- 2024-08-01 00:21:06
本发明属于自动泊车的,特别涉及一种基于纯跟踪的自动泊车纵向控制方法。
背景技术:
1、自动泊车系统在车辆接近目标位置或障碍物时,应进行极低车速的控制(<1km/h),以消除人类的恐慌;但由于路面状态多样(坡路、砖草车位等)且未知,而且通信及执行器(驱动系统/电液制动系统)存在延迟,因此控制车辆实现平顺的减速(无超调)并维持在该速度具有较大难度。经典pid控制依赖d项处理延迟,但微分器抗扰及其自身延迟问题无法有效解决。
2、如专利申请202110093165.8公开了一种车辆自动泊车的低速控制方法、系统、车辆及存储介质,包括:响应于收到泊车激活信号后,获取行驶过程中的车位信息,并在确定车位后规划出泊车路径;设定实时目标车速并作为控制目标;获取车辆的实际车速;根据目标车速查目标车速与车速差阈值的对应关系表,得到当前目标车速下的对应车速差阈值,当目标车速和实际车速的差值小于等于该车速差阈值时,即使pid控制算法计算出esp制动力,此时也不采取制动动作;当目标车速和实际车速的差值大于该车速差阈值时,通过pid控制算法计算出esp制动力,对整车进行制动调节。本发明能够控制车辆在较低车速时保证车速稳定,并且能够减少esp制动过程中频繁制动带来的顿挫。
3、又如专利申请202110509744.6公开的一种自动驾驶汽车低速自动泊车横向控制方法,包括:规划层规划出泊车轨迹并发送到控制层;定位层对车辆的当前位置实时定位获得定位信息并发送到控制层;底层接收控制层发出的控制指令并实时反馈车辆的当前状态信息;控制层根据车辆运动学模型得出车辆运动的状态空间方程,并建立lqr控制模型,进行求解得出泊车过程中的反馈车辆前轮转角;利用lqr控制模型计算得到实际的反馈前轮转角deltaf_feedback,并结合求得的前馈输出转角deltaf_feedforward得到最终的总输出转角,根据总输出转角控制车辆泊车过程中前向行驶和后向行驶的过程。
4、然而,现代控制中的lqr控制器等,若需处理系统延迟则需对其精确建模,难度较大,并且不利于在算力有限的控制器上实时运行。
技术实现思路
1、基于此,因此本发明的首要目地是提供一种基于纯跟踪的自动泊车纵向控制方法,该方法借鉴被自动驾驶横向控制所广泛应用的纯跟踪算法思想,提出基于纯跟踪的纵向控制方法。
2、本发明的另一个目地在于提供一种基于纯跟踪的自动泊车纵向控制方法,该方法通过纵向控制中产生目标加速度所应用的算法来实现对控制量的计算,能够对未来需求提前做出响应,削弱延迟影响的同时,提升抗扰能力。
3、为实现上述目的,本发明的技术方案为:
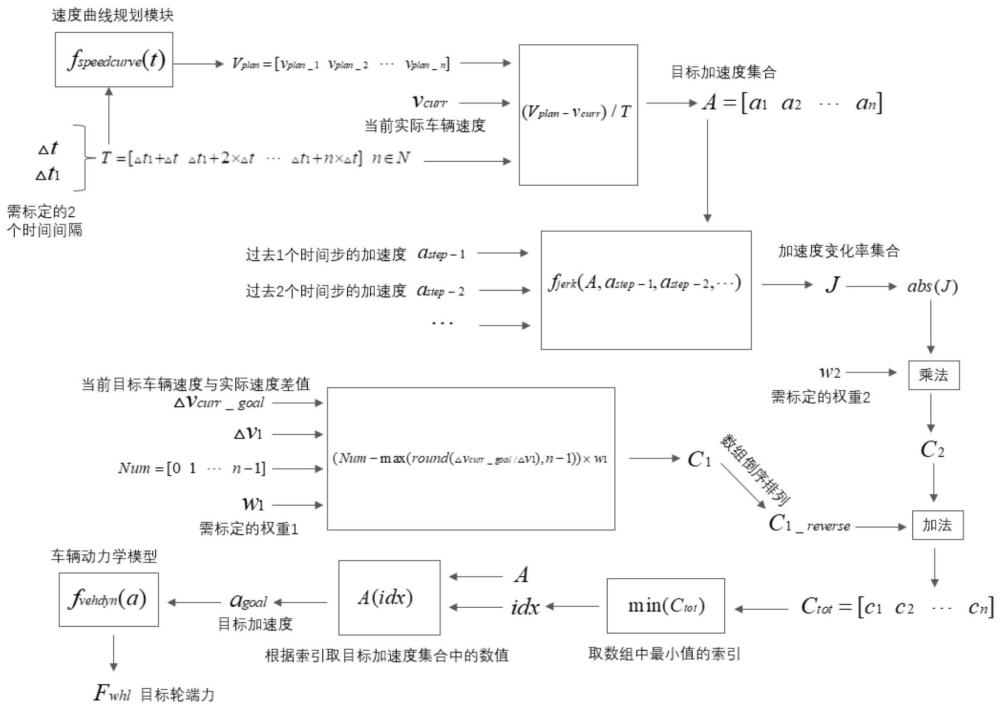
4、一种基于纯跟踪的自动泊车纵向控制方法,其中,泊车系统具有速度规划模块并且可获得未来一定时间内所规划的速度曲线;
5、设速度曲线为:vplan=fspeedcurve(t),其中t为时间;
6、泊车系统具有车辆动力学模型,可将目标加速度转变为轮端力,轮端力表示为:
7、fwhl=fvehdyn(a),其中a表示加速度;
8、步骤1,设当前时间为tcurr,车辆速度为vcurr,并有时间间隔δt、δt1,则有集合:
9、t=[δt1+δt δt1+2×δt…δt1+n×δt]n∈n
10、t即等间隔的预瞄时间集合,将t带入到fspeedcurve(t)中,获得目标速度集合:
11、vplan=[vplan_1 vplan_2…vplan_n],
12、依照如下方式,并获得目标加速度集合:
13、a=(vplan-vcurr)/t=[a1 a2…an]
14、步骤2,建立一个自然数集合num=[0 1…n-1],并设有速度差δv1,当前时刻车辆实际速度(vcurr)与目标速度差值为δvcurr_goal,作如下运算获得第一部分cost(代价)集合:
15、c1=(num-max(round(δvcurr_goal/δv1),n-1))×w1,其中,w1表示权重,round()表示四舍五入,max()表示取最大值;
16、车辆实际速度与本时刻目标速度差值较大时,应选取较短的预瞄时间,此时更注重时间上较近控制目标的达成。
17、当车辆实际速度与本时刻目标速度差值较小时,应选取较长的预瞄时间,此时更注重考虑时间上较远目标的变化。
18、因此,将c1倒叙排列获得c1_reverse
19、步骤3,计算目标加速度集合中各个加速度对应的jerk(加速度变化率),获得集合:
20、j=fjerk(a,astep-1,astep-2,…)
21、其中astep-1表示过去1个时间步的加速度,astep-2表示过去2个时间步的加速度,可根据需求使用更多的历史数据计算jerk。
22、此处历史加速度数据应选择控制系统输出的目标值。
23、获得考虑jerk的第二部分cost(代价)集合:
24、c2=abs(j)×w2,abs()表示取绝对值,w2表示权重
25、合并两部分cost集合:
26、ctot=c1_reverse+c2=[c1 c2…cn]
27、选取cost最小的加速度作为最终目标加速度:
28、[idx]=min(ctot)其中min()表示获得集合中数值最小的元素的位置
29、agoal=a(idx)
30、其中,以上步骤中δt、δt1、n、w1、w2的具体数值需实车标定确定,获得的agoal通过车辆动力学模型转为轮端力需求。
31、与现有技术相比,本发明的有益效果为:
32、1)综合当前控制偏差和未来控制目标获得控制量,因此可对未来需求提前做出响应,削弱系统延迟的影响。
33、2)当控制偏差较大时,控制量的大小主要取决于当前偏差,当控制偏差较小时,控制量大小取决于未来控制目标,在削弱延迟影响的同时,提升抗扰能力。
34、3)在上述基础上,考虑本时刻控制量和上一时刻状态偏差,选择优化控制量,限制jerk,提升平顺性。
技术特征:1.一种基于纯跟踪的自动泊车纵向控制方法,泊车系统具有速度规划模块并且可获得未来一定时间内所规划的速度曲线;
2.如权利要求1所述的基于纯跟踪的自动泊车纵向控制方法,其特征在于步骤1中,依照如下方式,并获得目标加速度集合:
3.如权利要求2所述的基于纯跟踪的自动泊车纵向控制方法,其特征在于步骤2中,车辆实际速度与本时刻目标速度差值较大时,应选取较短的预瞄时间,此时更注重时间上较近控制目标的达成;
4.如权利要求3所述的基于纯跟踪的自动泊车纵向控制方法,其特征在于步骤2中,因此,将c1倒叙排列获得c1_reverse。
5.如权利要求1所述的基于纯跟踪的自动泊车纵向控制方法,其特征在于步骤3中,历史加速度数据应选择控制系统输出的目标值。
6.如权利要求1所述的基于纯跟踪的自动泊车纵向控制方法,其特征在于以上步骤中δt、δt1、n、w1、w2的具体数值需实车标定确定,获得的agoal通过车辆动力学模型转为轮端力需求。
技术总结本发明公开了一种基于纯跟踪的自动泊车纵向控制方法,包括如下步骤:步骤1,通过T集合,获得目标速度集合:步骤2,建立一个自然数集合,获得第一部分cost集合:步骤3,计算目标加速度集合中各个加速度对应的加速度变化率,获得加速度变化率及jerk的第二部分cost集合,任何合并两部分cost集合,选取cost最小的加速度作为最终目标加速度。本发明通过纵向控制中产生目标加速度所应用的算法来实现对控制量的计算,能够对未来需求提前做出响应,削弱延迟影响的同时,提升抗扰能力。技术研发人员:白晨旴,文武,李强,余淼受保护的技术使用者:轻橙时代(深圳)科技有限责任公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240730/200720.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表