一种基于投影的局部路径规划方法与流程
- 国知局
- 2024-08-01 00:22:32
本发明涉及机器人路径规划,具体为一种基于投影的局部路径规划方法。
背景技术:
1、agv(地面自主移动机器人)利用多种传感器获取自身及周边环境信息,实现定位、跟踪、避障及路径规划等智能行为,是智能机器人领域的一个重要研究方向。它涵盖了智能控制、模式识别、机器学习等多种学科前沿领域。设计一种安全、可靠、鲁棒控制方法用于未知复杂环境下agv的自主导航(如茂密的森林、拥挤的办公室、走廊、仓库等)一直是一个巨大的挑战。这样的导航任务要求agv在向目标运动的同时避免陷入局部极小值和与障碍物的碰撞,并尊重各种系统约束,以完全自主的方式安全导航。为此,机器人应具有感知周围环境的能力,并能根据环境信息做出正确规划的能力,因此研究未知环境下的机器人路径规划具有重要意义。
2、一般来说,a*算法连同它的扩展jump point search(jsp)和hybrid a*,由于其在解决寻路问题时能够提供完备性和最优性而成为路径规划的热门选择。然而,在处理连续环境时,往往需要将其离散化为占用网格或路线图。这一过程可能需要大量的记忆和处理能力,并且严重依赖于环境信息。此外,机器人的路径规划与机器人定位、地图构建和机器人控制同步,在不确定环境中高效运行。
3、为了提高模型预测路径积分(mppi)中考虑系统约束的轨迹可行性,提出了一种新的采样策略,即log-mppi。此外,通过与二维栅格地图相结合,它在先前未知的环境中表现出良好的性能,并通过实验证据和严格的数学分析进行了验证。然而,由于问题的非凸性,基于采样的mppi模型的解本质上是近似的。二维占用栅格地图的构建带来了巨大的计算开销,也给规划算法带来了复杂性。基于梯度的轨迹规划方法被提出,通常由前端路径搜索和后端轨迹优化两个步骤组成。这些步骤确保符合运动学和动力学约束,从而产生鲁棒的路径规划结果。基于梯度法的前端搜索算法a*需要离散的栅格地图,而后端优化过程采用梯度法求解非凸优化问题。因此,得到的解是局部最优解,而不是全局最优解。这一结论可以根据a*算法的性质和基于梯度的优化方法在求解复杂问题时的局限性得出。
4、voronoi图是路径规划中的重要工具,基于voronoi图的投影方法最早在文献中提出。投影法是一种利用计算几何和凸优化理论进行机器人路径规划的框架。该方法综合了传感器检测和实时控制的优点,实现了机器人的实时路径规划。该方法包括三个步骤:第一步,利用自适应权重的voronoi图构建局部工作空间;第二种是求解凸优化问题来确定局部导航目标;三是实时地控制机器人朝向其局部导航目标。文献采用时变凸优化方法求解局部导航目标,在路径规划方面也取得了较好的效果。投影法由于其良好的理论基础、实时处理能力和稳健的可扩展性,优于其他路径规划算法。然而,仍然存在几个显著的挑战,包括:区域投影容易收敛到局部极小值,障碍物适应范围(例如,仅针对圆形障碍物)有限,以及缺乏实际应用仅限于理论阶段。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种基于投影的局部路径规划方法。能够有效的对机器人的路径和速度进行规划。
2、本发明所要解决的技术问题采用以下技术方案来实现:
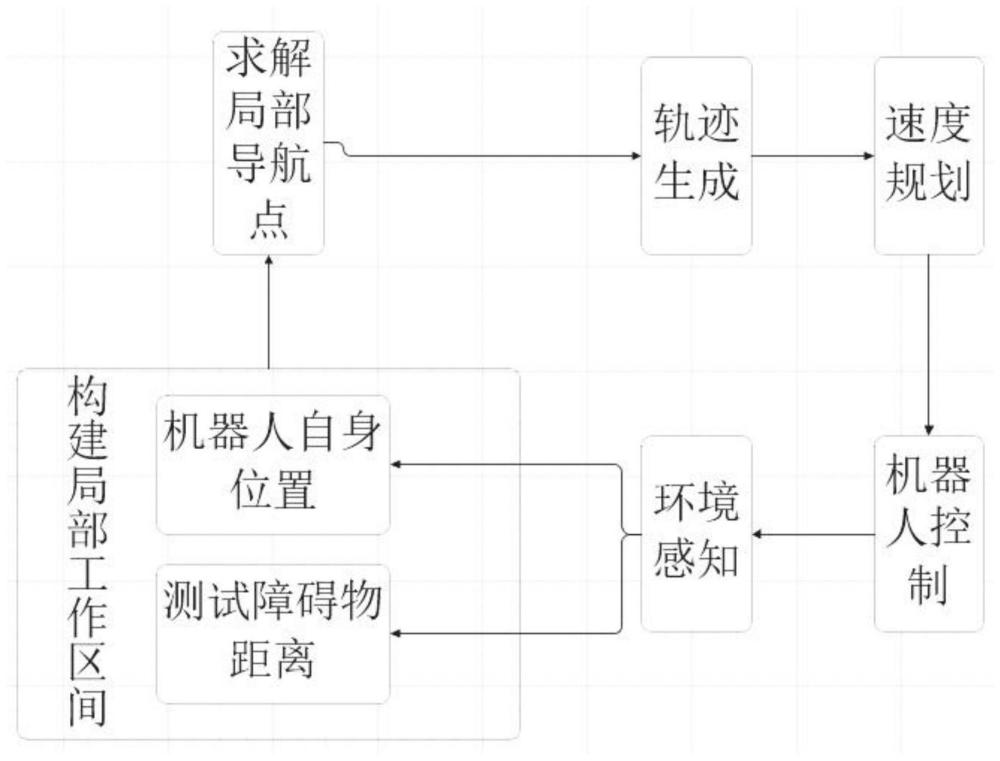
3、一种基于投影的局部路径规划方法,其特征在于:包括以下步骤:
4、步骤一、构建含有不等式约束的凸优化问题,求解该问题得到局部导航点的信息;
5、步骤二、构造加速度最小化的含有始末状态约束的最优化问题,利用庞特里亚金极小值原理进行求解,得到一条连接机器人自身和局部导航点的光滑轨迹;
6、步骤三、利用地面机器人系统的微分平坦特性,求解得到机器人实时控制所需要的线速度和角速度。
7、优选地,步骤一中所述的凸优化问题描述如下:
8、min||q-xg||2
9、subtoq∈lw(xc)
10、其中,lw(xc)表示不等式约束,其意义为局部的工作区间,具体的表达式为:
11、
12、其中,
13、
14、bi(xc)=(ci-xc)t(θici+(1-θi)xc+r(xc-ci)/(||xc-ci||));
15、其中,xc代表机器人的位置,r代表机器人的半径,ri代表障碍物的半径,ci代表障碍物的位置,xg代表机器人的目标位置。
16、优选地,局部工作区域的构建方式如下:
17、
18、
19、
20、其中,sf为机器人与障碍物之间的安全距离,和分别为障碍物与机器人之间距离最小值点。
21、优选地,步骤二中所述的加速度最小化的含有始末状态约束的最优化问题描述如下:
22、
23、
24、
25、其中,pk代表两个坐标轴的轨迹,代表其速度和加速度,分别代表初始坐标、终止坐标、初始速度、终止的速度,t为终止时间。
26、优选地,再结合庞特里亚金极小值原理,求解可得:
27、
28、
29、优选地,步骤三中微分平坦特性描述如下:
30、由差速轮小车的模型的动力学方程:
31、
32、结合可以得到轨线的参考轨迹:
33、
34、选取平坦变量:z=(zx,zy),可以得到:
35、
36、其中x、y代表机器人的位置,θ代表机器人的朝向角,v和w代表机器人的线速度和角速度。
37、本发明的有益效果是:
38、本发明利用模型的微分平坦性,考虑机器人位姿满足动力学和运动学约束,提出了一种轨迹和速度规划方法,给出了一种不依赖于局部地图构建的局部路径规划方法,其将轨迹最优化和速度规划结合在一起,在实时控制和传感器扫描方面具有优势。
技术特征:1.一种基于投影的局部路径规划方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种基于投影的局部路径规划方法,其特征在于:步骤一中所述的凸优化问题描述如下:
3.根据权利要求2所述的一种基于投影的局部路径规划方法,其特征在于:局部工作区域的构建方式如下:
4.根据权利要求1所述的一种基于投影的局部路径规划方法,其特征在于:步骤二中所述的加速度最小化的含有始末状态约束的最优化问题描述如下:
5.根据权利要求4所述的一种基于投影的局部路径规划方法,其特征在于:再结合庞特里亚金极小值原理,求解可得:
6.根据权利要求1所述的一种基于投影的局部路径规划方法,其特征在于:步骤三中微分平坦特性描述如下:
技术总结本发明涉及机器人路径规划技术领域,具体为一种基于投影的局部路径规划方法,包括步骤一、构建含有不等式约束的凸优化问题,求解该问题得到局部导航点的信息;步骤二、构造加速度最小化的含有始末状态约束的最优化问题,利用庞特里亚金极小值原理进行求解,得到一条连接机器人自身和局部导航点的光滑轨迹;步骤三、利用地面机器人系统的微分平坦特性,求解得到机器人实时控制所需要的线速度和角速度。本发明利用模型的微分平坦性,考虑机器人位姿满足动力学和运动学约束,提出了一种轨迹和速度规划方法,给出了一种不依赖于局部地图构建的局部路径规划方法,其将轨迹最优化和速度规划结合在一起,在实时控制和传感器扫描方面具有优势。技术研发人员:张子明,刘庆山,赵子隆,许劭晟,王纬国受保护的技术使用者:国营芜湖机械厂技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/200823.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表