一种适用于恶劣地形环境的自适应光伏清洁机器人
- 国知局
- 2024-07-31 17:54:47
本技术涉及光伏清洁设备,具体涉及一种适用于恶劣地形环境的自适应光伏清洁机器人。
背景技术:
1、随着人们对清洁能源的重视程度逐渐提高,光伏行业得到了快速的发展,光伏发电的装机容量呈逐年快速增长的趋势。
2、目前,光伏板多采用裸露安装,长时间使用后,其表面存在灰尘和细小颗粒物堆积的问题,不仅严重影响光电转换效率,而且细小颗粒物甚至可能对光伏系统造成损坏。而光伏系统多安装在环境恶劣的沙漠戈壁地区,人工清扫不仅困难度极大,而且安全风险非常高。因此,市面上应运而生了一种光伏板自动清灰机器人,能够有效清理光伏板表面的灰尘和细小颗粒物。
3、请参见中国专利一种光伏板自动清灰机器人(申请号:202223143368.2),现有的光伏板自动清灰机器人只能清扫固定式光伏支架上的光伏板或者倾斜方向一致(可能存在小角度差或者高差)的可调角光伏板。而为了最大程度地吸收太阳光来提高光电转换效率,越来越多的光伏电站开始普及平单轴跟踪式光伏板,平单轴跟踪式光伏板是一种将光伏板安装在平单轴光伏支架上的光伏系统。平单轴光伏支架相比于传统的固定式光伏支架,平单轴光伏支架采用了一种可以通过单轴追踪系统大大范围调整光伏板角度的支架,实现光伏板对太阳的实时跟踪,大幅提升了光伏板的发电能力。但现有的光伏板自动清灰机器人由于结构设计的问题,滚刷的姿态调节范围非常小,并不适用于能够大角度转动调节的平单轴跟踪式光伏板。
4、因此,本案申请人设计出了一种适用于平单轴跟踪式光伏板的自适应光伏清洁机器人,请参见申请号为202311088309.6的中国专利申请。通过将两个升降驱动机构分别设置在龙门架的两个直立部上,使伸缩组件配合两侧的升降驱动机构大范围调节电动滚刷的姿态,不仅能够快速升降调整电动滚刷的高度,而且能够快速调整电动滚刷的倾斜朝向,同时电动滚刷的倾斜角度也能够大范围自由调节,既适用于平单轴跟踪式光伏板的清洁,又适用于固定式等常规光伏板的清洁,通用性好。
5、本案申请人在应用上述自适应光伏清洁机器人的过程中发现,以驱动轮为形式的行走机构虽然能够实现原地90°或任意角度转向,能够在狭窄空间快速换行,对新的一行平单轴跟踪式光伏板进行清洁,但是,驱动轮为形式的行走机构难以适应于沙漠、戈壁、泥滩和冰雪等恶劣地形环境,不仅常常出现打滑问题,而且容易出现驱动轮深陷而完全失去行动能力的问题。若改用现有的履带式行走机构,虽然能够适应于沙漠、戈壁、泥滩和冰雪等恶劣地形环境,但并不能原地90°或任意角度转向,从而不能够在狭窄空间快速换行。
6、解决以上问题成为当务之急。
技术实现思路
1、为解决以上的技术问题,本实用新型提供了一种适用于恶劣地形环境的自适应光伏清洁机器人。
2、其技术方案如下:
3、一种适用于恶劣地形环境的自适应光伏清洁机器人,包括龙门架以及安装在龙门架上的自适应清洁组件,所述龙门架包括横向延伸的横梁部以及竖向向下延伸地设置在横梁部两端的两个直立部,所述横梁部和两个直立部共同构成“门”形结构,两个直立部的下端均安装有一套行走机构,其要点在于:所述行走机构均包括沿前后方向横向安装在对应直立部下端的行走架主梁、分别能够沿水平方向转动地安装在行走架主梁两端的两根行走架侧梁以及分别用于带动对应行走架侧梁转动的两个侧梁转动驱动组件,所述行走架侧梁既能够在对应侧梁转动驱动组件带动下转动至与行走架主梁连成一条直线,又能够在对应侧梁转动驱动组件带动下朝远离龙门架的方向转动至与行走架主梁垂直,所述行走架主梁的底部通过主梁履带支架安装有中间电动行走履带,所述行走架侧梁的底部通过侧梁履带支架安装有侧部电动行走履带,所述主梁履带支架和侧梁履带支架中,至少其中一种能够在支架伸缩组件的带动下升降,以使中间电动行走履带的高度能够低于或等于或高于侧部电动行走履带的高度。
4、与现有技术相比,本实用新型的有益效果:
5、采用以上技术方案的一种适用于恶劣地形环境的自适应光伏清洁机器人,当对一行平单轴跟踪式光伏板进行清洁时,各行走机构的中间电动行走履带与两个侧部电动行走履带处于同一直线,且高度相同,能够适应于沙漠、戈壁、泥滩和冰雪等恶劣地形环境;当需要换行清洁平单轴跟踪式光伏板时,各行走机构先使两个侧部电动行走履带的高度高于中间电动行走履带的高度,再将两个侧部电动行走履带转动90°,然后使两个侧部电动行走履带的高度低于中间电动行走履带的高度,两个侧部电动行走履带启动,进行换行移动,换行完成后,再将两个侧部电动行走履带转动至与中间电动行走履带连成一条直线,然后使两个侧部电动行走履带的高度等于中间电动行走履带的高度,从而能够对该行平单轴跟踪式光伏板进行清洁,实现了基于履带式的行走机构的原地90°或任意角度转向。
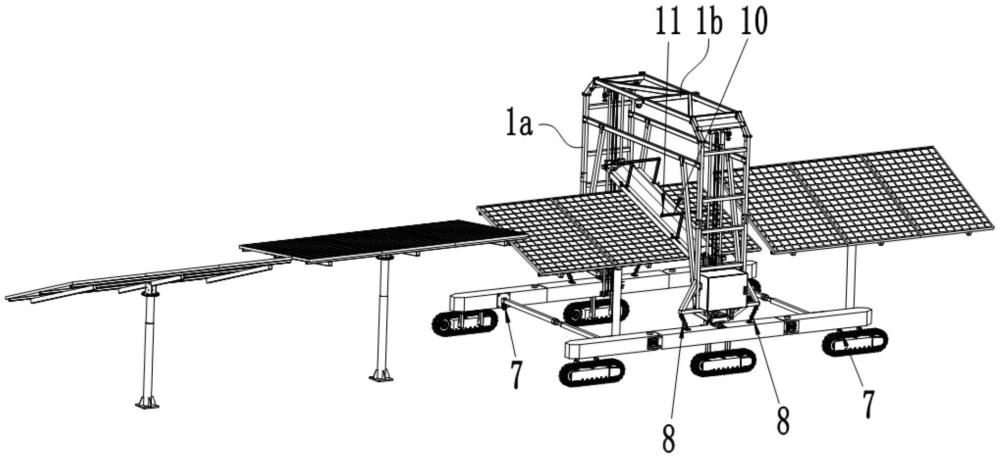
技术特征:1.一种适用于恶劣地形环境的自适应光伏清洁机器人,包括龙门架(1)以及安装在龙门架(1)上的自适应清洁组件,所述龙门架(1)包括横向延伸的横梁部(1b)以及竖向向下延伸地设置在横梁部(1b)两端的两个直立部(1a),所述横梁部(1b)和两个直立部(1a)共同构成“门”形结构,两个直立部(1a)的下端均安装有一套行走机构(7),其特征在于:所述行走机构(7)均包括沿前后方向横向安装在对应直立部(1a)下端的行走架主梁(7a)、分别能够沿水平方向转动地安装在行走架主梁(7a)两端的两根行走架侧梁(7b)以及分别用于带动对应行走架侧梁(7b)转动的两个侧梁转动驱动组件,所述行走架侧梁(7b)既能够在对应侧梁转动驱动组件带动下转动至与行走架主梁(7a)连成一条直线,又能够在对应侧梁转动驱动组件带动下朝远离龙门架(1)的方向转动至与行走架主梁(7a)垂直,所述行走架主梁(7a)的底部通过主梁履带支架(7c)安装有中间电动行走履带(7d),所述行走架侧梁(7b)的底部通过侧梁履带支架(7e)安装有侧部电动行走履带(7f),所述主梁履带支架(7c)和侧梁履带支架(7e)中,至少其中一种能够在支架伸缩组件的带动下升降,以使中间电动行走履带(7d)的高度能够低于或等于或高于侧部电动行走履带(7f)的高度。
2.根据权利要求1所述的一种适用于恶劣地形环境的自适应光伏清洁机器人,其特征在于:所述侧梁转动驱动组件均包括安装在对应行走架侧梁(7b)中的侧梁转动驱动电机(7g)以及安装在对应行走架侧梁(7b)与行走架主梁(7a)转动连接处的蜗轮蜗杆减速器(7h),所述侧梁转动驱动电机(7g)能够通过蜗轮蜗杆减速器(7h)带动对应的行走架侧梁(7b)相对行走架主梁(7a)转动。
3.根据权利要求1所述的一种适用于恶劣地形环境的自适应光伏清洁机器人,其特征在于:所述支架伸缩组件均包括伸缩支架(7i)以及安装在伸缩支架(7i)中的伸缩驱动气缸(7j);
4.根据权利要求1所述的一种适用于恶劣地形环境的自适应光伏清洁机器人,其特征在于:所述行走架侧梁(7b)靠近龙门架(1)的一侧均安装有连杆安装座(13)、可转动地安装在连杆安装座(13)上的加强连杆(14)以及用于带动加强连杆(14)沿水平方向转动的连杆驱动电机(15),位于龙门架(1)前侧的其中一根所述加强连杆(14)的外端和位于龙门架(1)后侧的其中一根所述加强连杆(14)的外端均安装有第一磁体(16),位于龙门架(1)前侧的另外一根所述加强连杆(14)的外端和位于龙门架(1)后侧的另外一根所述加强连杆(14)的外端均通过磁体伸缩模组(17)安装有能够与第一磁体(16)相互吸附的第二磁体(18),各加强连杆(14)既能够在对应连杆驱动电机(15)的带动下转动至与相邻行走架侧梁(7b)平行,又能够在对应连杆驱动电机(15)的带动下转动至与相邻行走架侧梁(7b)垂直,以通过各磁体伸缩模组(17)调节对应的第二磁体(18)位置,使其与相邻的第一磁体(16)贴合并吸附。
5.根据权利要求4所述的一种适用于恶劣地形环境的自适应光伏清洁机器人,其特征在于:所述磁体伸缩模组(17)包括固定安装在对应加强连杆(14)外端的伸缩基座(17a)、伸缩配合地安装在伸缩基座(17a)远离加强连杆(14)一端的磁铁伸缩杆(17b)以及滑动配合地安装在加强连杆(14)中的磁铁位置调节电机(17c),所述伸缩基座(17a)靠近磁铁位置调节电机(17c)的一端开设有内螺纹孔(17a1),所述磁铁位置调节电机(17c)的电机轴通过联轴器(17d)连接有与其同步转动的磁铁位置调节丝杆(17e),该磁铁位置调节丝杆(17e)与内螺纹孔(17a1)共同构成丝杆螺母运动副,所述磁铁伸缩杆(17b)远离磁铁位置调节电机(17c)的一端安装有第二磁体(18),该第二磁体(18)与磁铁位置调节丝杆(17e)远离联轴器(17d)的一端固定连接。
6.根据权利要求4所述的一种适用于恶劣地形环境的自适应光伏清洁机器人,其特征在于:所述第一磁体(16)和第二磁体(18)中,其中一个为永磁体,另外一个为电磁铁。
7.根据权利要求4所述的一种适用于恶劣地形环境的自适应光伏清洁机器人,其特征在于:位于龙门架(1)前侧的其中一根所述行走架侧梁(7b)的内侧和位于龙门架(1)后侧的其中一根所述行走架侧梁(7b)的内侧均安装有两个漫反射光电开关(19),位于同一行走架侧梁(7b)上的两个所述漫反射光电开关(19)分别位于对应加强连杆(14)的前后两侧。
8.根据权利要求1所述的一种适用于恶劣地形环境的自适应光伏清洁机器人,其特征在于:所述自适应清洁组件包括电动滚刷(2)和两个升降驱动机构(3),两个升降驱动机构(3)分别竖向安装在两个直立部(1a)上,并分别能够带动对应的伸缩杆连接座(4)升降,所述电动滚刷(2)的壳体总成(2a)中安装有至少一套伸缩组件(5),各伸缩组件(5)均沿电动滚刷(2)的长度方向穿出电动滚刷(2)的两端后分别铰接在两个伸缩杆连接座(4)上。
9.根据权利要求8所述的一种适用于恶劣地形环境的自适应光伏清洁机器人,其特征在于:所述伸缩组件(5)包括两根沿壳体总成(2a)长度方向延伸的滑动杆(5a)、两根沿壳体总成(2a)长度方向延伸的同步齿条(5b)以及能够相对壳体总成(2a)转动的随动齿轮(5c),两根滑动杆(5a)能够沿壳体总成(2a)的长度方向滑动,两根滑动杆(5a)的外端分别从壳体总成(2a)的对应端穿出后铰接在对应的伸缩杆连接座(4)上,两根滑动杆(5a)的内端分别与对应的同步齿条(5b)固定连接,所述随动齿轮(5c)同时与两根同步齿条(5b)啮合;
10.根据权利要求9所述的一种适用于恶劣地形环境的自适应光伏清洁机器人,其特征在于:所述伸缩组件壳体(2a4)远离滚刷壳体(2a3)的一侧均安装有多个第一超声波距离传感器(9),各第一超声波距离传感器(9)的探测方向均平行于滚刷(2b)的凸出方向,所述伸缩组件壳体(2a4)上安装有多根向前延伸的超声波传感器支架(10),各超声波传感器支架(10)的外端均安装有探测方向与滚刷(2b)的凸出方向平行的第二超声波距离传感器(11),所述龙门架(1)的前后两侧均安装有摄像头(12)。
技术总结本技术公开了一种适用于恶劣地形环境的自适应光伏清洁机器人,包括龙门架以及均安装在龙门架上的自适应清洁组件和两套行走机构,行走机构均包括沿前后方向横向安装在对应直立部下端的行走架主梁、分别能够沿水平方向转动地安装在行走架主梁两端的两根行走架侧梁以及分别用于带动对应行走架侧梁转动的两个侧梁转动驱动组件,行走架主梁的底部通过主梁履带支架安装有中间电动行走履带,所述行走架侧梁的底部通过侧梁履带支架安装有侧部电动行走履带。采用以上技术方案的一种适用于恶劣地形环境的自适应光伏清洁机器人,既能够适应于沙漠、戈壁、泥滩和冰雪等恶劣地形环境,又实现了基于履带式的行走机构的原地90°或任意角度转向。技术研发人员:阳洋,罗洋,罗远新,陈福双,马澳康,李心萍,祝烽云,朱涛,张雷,赵山雨,汪鑫,李月江受保护的技术使用者:重庆大学技术研发日:20231031技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240731/177257.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表