一种星载反射面天线调节控制系统的制作方法
- 国知局
- 2024-07-31 18:22:57
本技术涉及星载反射面安装调节,特别是涉及一种星载反射面天线调节控制系统。
背景技术:
1、随着科技的进步和人类对太空的探索,对航天器的要求会越来越高。天线作为航天器信号接收和发射的器件,所有人都不会陌生,但星载反射面天线对于大多数人而言是陌生的。星载反射面天线主要是由馈源、主反射面、副反射面以及相关结构支撑共同组成,针对主反射面、副反射面以及馈源三者之间相对空间位置精度,因馈源和副反射面是通过金属加刚性固定,所以只要考虑主反射面与副反射面之间的空间位置精度。主反射面比副反射面要小得多,主要是通过多根支撑杆及其辅助件固定在主反射面的上方。
2、由于支撑杆的材料、强度、尺寸等一系列原因,导致上方的主反射面在正常装配后其空间精度会比较差,误差最大可以达到1毫米级,与精度要求相差甚远。但实际的情况又是主反射面如果要满足空间精度要求,就需要保证支撑件的精度在±2微米,或者直接碳纤维复材整体成型,花费的代价巨大且无法调节,必须一次成功。否则,主、副反射面在装配时,只能通过不断对支撑件进行修搓返修来调整主反射面的空间精度,耗时耗力的同时也不一定能保证质量。为了降低星载反射面天线中主反射面的装调难度,节省生产制造成本。
技术实现思路
1、本技术的目的是:为解决上述技术问题,本技术提供了一种星载反射面天线调节控制系统,旨在提高星载反射面天线中主反射面的装调效率。
2、本技术的一些实施例中,通过增设x向调节部,y向调节部和在上支撑杆和下支撑杆之间增加伸缩杆,实现对于主反射板的空间位置调节,将主反射面的位置调整至满足其空间精度要求的位置,相较于固定结构的主反射面安装,误差达到1毫米级的缺陷,能够将主反射面的安装控制在±0.03毫米的精度要求。
3、本技术的一些实施例中,通过增设驱动部,在主反射板完成初始安装后连接驱动部,并根据预设的工作参数,对x向调节部和y向调节部的移动量进行精准控制,提高对于主反射板的安装调节效率。节约制造成本,保证装配精度。
4、本技术的一些实施例中,提供了一种星载反射面天线调节控制系统,包括:
5、主固定座;
6、支撑部,用于连接所述主固定座和副反射面;
7、y向调节部,所述y向调节座沿y轴方向滑动安装在所述主固定座的地面;
8、x向调节部,所述x向调节部沿x轴方向滑动安装在y向调节座的底面,所述x向调节座用于安装主反射面;
9、第一推力台,沿y轴设置于所述y向调节座的顶面;
10、第二推力台,沿x轴设置于所述y向调节座的底面;
11、第一调节杆,沿y轴穿设于所述主固定座内,所述第一调节杆用于连接并驱动所述第一推力台;
12、第二调节杆,沿x轴穿设于所述x向调节座内,所述第二调节杆用于连接并驱动所述第二推力台;
13、驱动部,与所述第一调节杆和所述第二调节杆连接,所述驱动部根据副反射面的位置参数和主反射板的位置参数生成一级调节计划,并根据一级调节计划设定所述第一调节杆和第二调节杆的工作参数。
14、本技术的一些实施例中,所述驱动部包括:
15、第一处理模块,用于根据副反射面的位置参数生成主反射面的期望位置;
16、第二处理模块,用于获取主反射面的实时位置参数,并根据所述主反射面的实时位置参数和期望位置,生成一级初始差值和二级初始差值;
17、所述第二处理模块还用于根据设定调节参数;
18、第一驱动模块,与所述第一调节杆连接,所述第一驱动模块用于控制所述第一调节杆的旋转速度;
19、第二驱动模块,与所述第二调节杆连接,所述第二驱动模块用于控制所述第二调节杆的旋转速度。
20、本技术的一些实施例中,所述设定调节参数,包括:
21、获取一级初始差值和二级初始差值;
22、根据一级初始差值设定调节顺序;
23、根据一级差值设定第一调节杆的旋转速度v1;
24、根据二级差值设定第二调节杆的旋转速度v2;
25、根据一级初始差值和二级初始差值生成调节评价值c,根据调节评价值c设定补偿系数m;
26、根据补偿系数m修正第一调节杆的旋转速度v1和第二调节杆的旋转速度v2。
27、本技术的一些实施例中,根据一级初始差值设定调节顺序时,包括:
28、预设一级差值阈值;
29、若一级初始差值大于预设一级差值阈值时,设定调节顺序为第一调节顺序;
30、若一级初始差值小于预设一级初始差值阈值时,设定调节顺序为第二调节顺序。
31、本技术的一些实施例中,根据一级差值设定第一调节杆的旋转速度v1时,包括:
32、预设第一一级差值区间(a1,a2),第二一级差值区间(a2,a3)和第三一级差值区间(a3,a4);
33、获取实时一级差值a;
34、当实时一级差值a处于预设第一一级差值区间时,设定第一调节杆的旋转速度v1为第一旋转速度v1,即v1=v1;
35、当实时一级差值a处于预设第二一级差值区间时,设定第一调节杆的旋转速度v1为第二旋转速度v1,即v1=v2;
36、当实时一级差值a处于预设第三一级差值区间时,设定第一调节杆的旋转速度v1为第三旋转速度v3,即v1=v3;且v1<v2<v3;
37、当实时一级差值a为零时,所述第一调节杆停止旋转。
38、本技术的一些实施例中,根据二级差值设定第二调节杆的旋转速度v2时,包括:
39、预设第一二级差值区间(b1,b2),第二二级差值区间(b2,b3)和第三二级差值区间(b3,b4);
40、当第一调节杆停止旋转后,获取实二级差值b;
41、若实时二级差值b处于预设第一二级差值区间时,设定第二调节杆的旋转速度v2为第一旋转速度v1,即v2=v1;
42、若实时二级差值b处于预设第二二级差值区间时,设定第二调节杆的旋转速度v2为第二旋转速度v2,即v2=v2;
43、若实时二级差值b处于预设第三二级差值区间时,设定第二调节杆的旋转速度v2为第三旋转速度v3,即v2=v3,且v1<v2<v3;
44、当实时二级差值a为零时,所述第二调节杆停止旋转。
45、本技术的一些实施例中,根据一级初始差值和二级初始差值生成调节评价值c时,包括:
46、根据一级初始差值生成第一参考评价值h1;
47、根据第二初始差值生成第二参考评价值h2;
48、根据第一参考评价值h1和第二参考评价值h2生成调节评价值c;
49、c=e1*h1+e2*h2,其中,e1为预设第一权重系数,e2为预设第二权重系数,且e1+e2=1。
50、本技术的一些实施例中,根据调节评价值c设定补偿系数m时,包括:
51、预设第一调节评价值区间(c1,c2),第二参考评价值区间(c2,c3)和第三参考评价值区间(c3,c4);
52、若运行评价值c处于预设第一调节评价值区间时,设定补偿系数m为预设第一补偿系数m1,即m=m1;
53、若运行评价值c处于预设第二调节评价值区间时,设定补偿系数m为预设第二补偿系数m2,即m=m2;
54、若运行评价值c处于预设第三调节评价值区间时,设定补偿系数m为预设第三补偿系数m3,即m=m3;且1<m1<m2<m3;
55、修正后第一调节杆的旋转速度v1=m*vi,(i=1,2,3);
56、第二调节杆的旋转速度v2=m*vi,(i=1,2,3)。
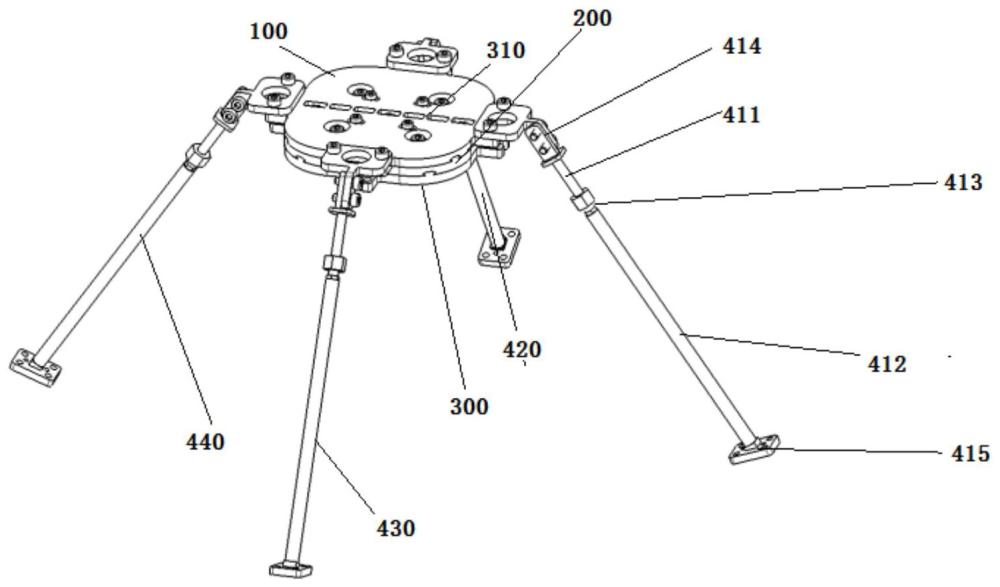
57、本技术的一些实施例中,所述支撑部包括:
58、第一支撑件,第二支撑件,第三支撑件和第四支撑件;
59、所述第一支撑件包括:
60、支撑座,用于连接副反射面;
61、下支撑杆,一端与所述支撑座连接;
62、伸缩杆,所述下支撑杆的另一端与所述伸缩杆连接,所述伸缩杆的顶端转动连接有上支撑杆;
63、连接固定块,用于连接所述上支撑杆和所述主固定座。
64、本技术实施例一种星载反射面天线调节控制系统与现有技术相比,其有益效果在于:
65、通过增设x向调节部,y向调节部和在上支撑杆和下支撑杆之间增加伸缩杆,实现对于主反射板的空间位置调节,将主反射面的位置调整至满足其空间精度要求的位置,相较于固定结构的主反射面安装,误差达到1毫米级的缺陷,能够将主反射面的安装控制在±0.03毫米的精度要求。
66、通过增设驱动部,在主反射板完成初始安装后连接驱动部,并根据预设的工作参数,对x向调节部和y向调节部的移动量进行精准控制,提高对于主反射板的安装调节效率。节约制造成本,保证装配精度。
本文地址:https://www.jishuxx.com/zhuanli/20240731/178938.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
温控保护开关的制作方法
下一篇
返回列表