隧道智慧交通管控系统及方法与流程
- 国知局
- 2024-07-31 20:19:15
本技术涉及车辆交通控制,具体涉及隧道智慧交通管控系统及方法。
背景技术:
1、现阶段由于隧道施工的主要工序是爆破开挖、出渣、初期支护、仰拱及二次衬砌等作业,出于隧道施工进度因素的影响,洞内空间通常较为狭小,存在交通拥堵和车辆、人员错位而导致的安全风险,不利于大规模车辆调度运输。
2、并且,目前对于施工期的隧道洞内车辆的状态检测和交通管控主要包括车辆定位、数据采集、车辆调度、信息展示、报警处理等步骤,对隧道内车辆进行交通管控时,由于环境的复杂性和信息的多元化,难以做到实时收集洞内车辆交通状况信息及相关数据分析,无法实现对洞内行驶车辆进行远程智能调度,遇到突发状况,洞内交通秩序将被打乱,甚至造成交通瘫痪,致使施工进度减慢,各作业面施工相互干扰,耽误工期。
技术实现思路
1、本技术提供隧道智慧交通管控系统及方法,以解决隧道内车辆运动状态实时检测误差大导致的交通管控效率低的问题,所采用的技术方案具体如下:
2、第一方面,本技术一个实施例提供隧道智慧交通管控方法,该方法包括以下步骤:
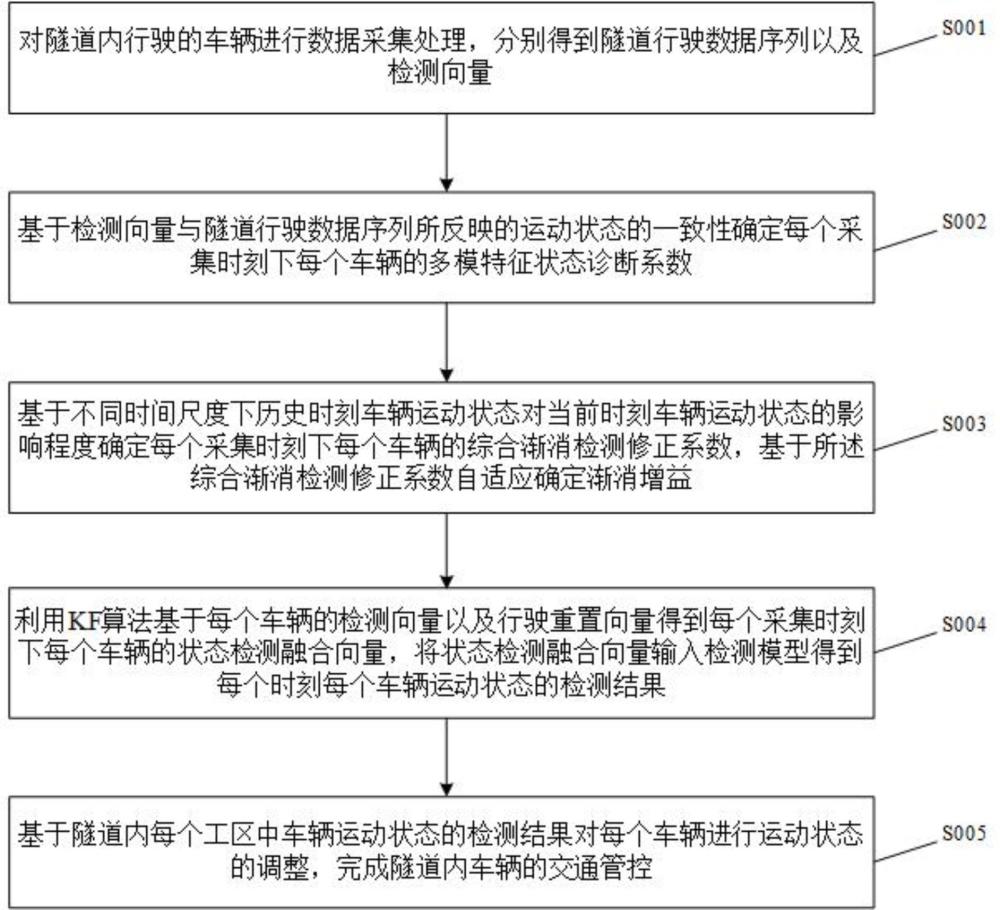
3、(1)利用车辆每个采集时刻下的行驶数据组成每个采集时刻下每辆车的隧道行驶数据序列;利用驾驶状态检测模型基于驾驶状态图像得到每个采集时刻下驾驶状态图像的检测向量;
4、(2)基于检测向量与隧道行驶数据序列所反映的运动状态的一致性确定每个采集时刻下每个车辆的多模特征状态诊断系数,所述多模特征状态诊断系数的确定方法为:
5、(2.1)基于每个采集时刻下每个车辆的隧道行驶数据序列中每种元素的时序曲线上极值变化量的分布特征确定所述每种元素的运动行为异常贡献度;
6、(2.2)基于每个采集时刻下每个车辆的隧道行驶数据序列中每种元素的运动行为异常贡献度以及每个采集时刻与其历史时刻下检测向量的相似性确定每个采集时刻下每个车辆的多模特征状态诊断系数;
7、(3)基于每个时刻下两种模态数据反映的车辆运动状态在不同时间尺度下受到历史时刻车辆运动状态的影响确定每个采集时刻每个车辆的渐消增益,所述渐消增益的确定方法为:
8、(3.1)基于每种模态数据在不同时间尺度下状态转移概率矩阵的标签稳定序列内元素的离散程度确定每个采集时刻每个车辆每种模态数据的数据凝滞系数;
9、(3.2)基于每个车辆多模特征状态诊断系数的异常得分确定每个采集时刻每个车辆的两端拖曳影响系数;
10、(3.3)基于每个采集时刻每个车辆的两端拖曳影响系数、两种模态数据的数据凝滞系数自适应确定kf算法中每个采集时刻每个车辆的渐消增益;
11、(4)采用kf算法基于每个时刻及其历史时刻的检测向量、行驶重置向量以及每个时刻下每个车辆的渐消增益确定每个采集时刻每个车辆的状态检测融合向量;利用svm模型基于所述状态检测融合向量确定隧道内每个时刻下每个车辆运动状态的检测结果;
12、(5)基于隧道内每个工区内每个时刻下每个车辆运动状态的检测结果完成对隧道内车辆的交通管控。
13、优选的,所述基于每个采集时刻下每个车辆的隧道行驶数据序列中每种元素的时序曲线上极值变化量的分布特征确定所述每种元素的运动行为异常贡献度的方法为:
14、将所有隧道行驶数据序列内同一种元素的值以及对应的采集时刻作为输入,将采用曲线拟合算法获取的拟合曲线作为每种元素的时序曲线,将所述时序曲线上任意两个相邻峰值点纵坐标之间差值的绝对值与任意两个相邻峰值点横坐标之间差值的绝对值的比值作为任意两个相邻峰值点之间的极值变化量;
15、将每个车辆的隧道行驶数据序列内每种元素的时序曲线上起始时刻到每个采集时刻之间所有极值变化量中最大值与最小值的比值作为第一变化量;
16、计算所述每种元素的时序曲线上每个采集时刻与其时间间隔的两个峰值点的纵坐标之间差值绝对值之和,将以自然常数为底数,以所述绝对值之和的相反数为指数的计算结果作为分子;
17、将每个车辆的隧道行驶数据序列内每种元素的时序曲线上起始时刻到每个采集时刻之间所有极值变化量组成序列的赫斯特指数与0.01的和作为分母;
18、将分子与分母的比值与第一变化量的乘积作为每个采集时刻下每个车辆的隧道行驶数据序列中每种元素的运动行为异常贡献度。
19、优选的,所述基于每个采集时刻下每个车辆的隧道行驶数据序列中每种元素的运动行为异常贡献度以及每个采集时刻与其历史时刻下检测向量的相似性确定每个采集时刻下每个车辆的多模特征状态诊断系数的方法为:
20、将每个采集时刻下每个车辆的隧道行驶数据序列内所有元素的运动行为异常贡献度的累加和作为第一乘积因子;
21、将每个采集时刻、每个采集时刻的一个历史时刻下每个车辆对应的检测向量之间的皮尔逊相关系数在每个采集时刻的所有历史时刻上的累加结果作为分母;
22、将每个采集时刻下每个车辆对应检测向量中第一个元素与分母的比值作为第二乘积因子;
23、每个采集时刻下每个车辆的多模特征状态诊断系数由第一乘积因子、第二乘积因子两部分组成,其中,所述多模特征状态诊断系数分别与第一乘积因子、第二乘积因子成正比关系。
24、优选的,所述基于每种模态数据在不同时间尺度下状态转移概率矩阵的标签稳定序列内元素的离散程度确定每个采集时刻每个车辆每种模态数据的数据凝滞系数的方法为:
25、将每个车辆在所有采集时刻下驾驶状态图像的检测向量中同一种标签的值作为输入,将利用非线性最小二乘法获取的拟合曲线作为每种标签的时序曲线;
26、s1:将每种标签的时序曲线作为输入,采用差分算法获取所述时序曲线上的波峰点、波谷点,将任意两个相邻波峰点对应采集时刻之间的时间间隔作为一个时间窗口,将每种大小相等的时间窗口的宽度作为一个时间尺度,将所有时间尺度按照降序顺序排列得到的序列作为时间尺度序列;
27、s2:将每种标签在每个时间尺度内采集时刻数量与1的差值作为分母,将每种标签在每个时间尺度内两种取值之间的转换次数与分母的比值作为每种标签在每个时间尺度内两种取值之间转换的概率,将由每种标签在每个时间尺度内所有种取值之间转换的概率组成的矩阵作为每种标签在每个时间尺度上的状态转移矩阵;
28、s3:将每种标签在每个时间尺度上的状态转移矩阵作为输入,将采用svd算法得到的所有奇异值组成的序列作为所述状态转移矩阵的标签稳定序列;
29、s4:将每个采集时刻每个车辆对应检测向量中每种标签在时间尺度序列中前一个元素与后一个元素上的标签稳定序列的变异系数之间的差值在所述检测向量上的累加结果作为每个采集时刻每个车辆的驾驶状态图像的数据凝滞系数;
30、s5:将隧道行驶数据序列内每种元素的时序曲线代替每种标签的时序曲线,重复s1-s4,得到每个采集时刻每个车辆的隧道行驶数据序列的数据凝滞系数。
31、优选的,所述基于每个车辆多模特征状态诊断系数的异常得分确定每个采集时刻每个车辆的两端拖曳影响系数的方法为:
32、将所有采集时刻下每个车辆的多模特征状态诊断系数作为输入,采用rrcf算法获取每个多模特征状态诊断系数的异常得分,其次统计所有异常得分中的极值点,分别将位于每个多模特征状态诊断系数的异常得分左侧、右侧最近的一个极值点对应的采集时刻作为每个多模特征状态诊断系数对应采集时刻的左端时刻、右端时刻;
33、计算每个车辆在每个采集时刻的左端时刻、右端时刻所取预设数量个采集时刻的多模特征状态诊断系数的累加结果,将以自然常数为底数,以所述累加结果为真数的计算结果与每个采集时刻下每个车辆的多模特征状态诊断系数的乘积作为每个采集时刻下每个车辆的两端拖曳影响系数。
34、优选的,所述基于每个采集时刻每个车辆的两端拖曳影响系数、两种模态数据的数据凝滞系数自适应确定kf算法中每个采集时刻每个车辆的渐消增益的方法为:
35、将每个采集时刻每个车辆的隧道行驶数据序列、驾驶状态图像的数据凝滞系数之和与每个采集时刻下每个车辆的两端拖曳影响系数的乘积作为每个采集时刻每个车辆的渐消检测修正系数;
36、将以所述渐消检测修正系数为底数,以每个采集时刻与每个车辆在隧道内开始运动的初始时刻之间时间间隔为指数的计算结果与kf算法中每个采集时刻的卡尔曼增益的乘积作为每个采集时刻每个车辆的渐消增益。
37、优选的,所述采用kf算法基于每个时刻及其历史时刻的检测向量、行驶重置向量以及每个时刻下每个车辆的渐消增益确定每个采集时刻每个车辆的状态检测融合向量的方法为:
38、基于每个采集时刻下每个车辆的隧道行驶数据序列确定每个采集时刻下每个车辆内隧道行驶数据序列内每种元素的决策权重;
39、将每个隧道行驶数据序列内每种元素的决策权重与每种元素的乘积作为每种元素的重置值,将每个隧道行驶数据序列内所有元素的重置值组成的向量作为每个隧道行驶数据序列对应的行驶重置向量;
40、将第一个采集时刻至每个采集时刻之间所有采集时刻下每个车辆的检测向量、行驶重置向量作为输入,将每个采集时刻的渐消增益代替传统kf算法中对应时间步的卡尔曼增益,利用kf算法输出每个采集时刻下每个车辆的状态检测融合向量。
41、优选的,所述基于每个采集时刻下每个车辆的隧道行驶数据序列确定每个采集时刻下每个车辆内隧道行驶数据序列内每种元素的决策权重的方法为:
42、将每个车辆的所有采集时刻的隧道行驶数据序列作为输入,采用k-shape聚类算法将所述隧道行驶数据序列划分到预设数量个聚类簇中;统计每个聚类簇中每个车辆所有采集时刻下的隧道行驶数据序列内同种元素的运动行为异常贡献度的概率分布直方图;
43、将每个聚类簇内隧道行驶数据序列内每种元素与其余任意一种元素的运动行为异常贡献度的概率分布直方图之间的巴氏距离在隧道行驶数据序列上的累加作为第一累加值;
44、将每个聚类簇内隧道行驶数据序列内每种元素与其余任意一个聚类簇内隧道行驶数据序列内同种元素的运动行为异常贡献度的概率分布直方图之间的巴氏距离在其余所有聚类簇上的累加结果作为第二累加值;
45、将第一累加值与第二累加值的和作为每个聚类簇中隧道行驶数据序列内每种元素的类内外区分系数;
46、计算每个聚类簇中隧道行驶数据序列内每种元素的类内外区分系数与所有聚类簇中隧道行驶数据序列内每种元素的类内外区分系数累加和的比值,将所述比值与每个采集时刻下每个车辆的隧道行驶数据序列中每种元素的运动行为异常贡献度的乘积作为每个采集时刻下每个车辆内隧道行驶数据序列内每种元素的决策权重。
47、优选的,所述基于隧道内每个工区内每个时刻下每个车辆运动状态的检测结果完成对隧道内车辆的交通管控的方法为:
48、当隧道内车辆运动状态的实时检测模型检测到车辆运动状态异常时,将当前时刻下车辆运动状态的检测结果发送至智慧交通管控系统内报警处理模块,其被配置为处理告警信息;智慧交通管控系统内的报警模块内出现告警信息后,管理者立即根据车辆信息以及车辆驾驶员信息向该车辆发出警示信号,通知车辆所在工区内的监工人员前往该车辆进行辅助,完成对该车辆运动状态的实施调整,实现对隧道工区内车辆交通的管控。
49、第二方面,本技术实施例还提供了隧道智慧交通管控系统,包括存储器、处理器以及存储在所述存储器中并在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任意一项所述隧道智慧交通管控方法的步骤。
50、本技术的有益效果是:本技术通过分析驾驶状态图像、隧道行驶数据序列在车辆运动状态特征的一致性构建多模特征状态诊断系数,多模特征状态诊断系数考虑了运动状态异常时两种模态反映车辆、驾驶员特征的一致性,能够降低单一模态数据判断的误差概率;其次根据不同时间尺度下历史时刻车辆运动状态对当前时刻车辆运动状态的影响程度确定每个采集时刻下每个车辆的渐消检测修正系数,渐消检测修正系数考虑了每种模态数据在不同时间尺度下受到历史车辆运动状态影响的短期持续性特征,其有益效果在于能够避免隧道内的干扰因素对采集数据造成的瞬时异常对运动状态检测结果的影响。并基于渐消检测修正系数自适应确定车辆运动状态估计时的渐消增益,实现对kf算法的优化,提高车辆运动状态检测的准确性,从而提高隧道内车辆交通管控的效果。
本文地址:https://www.jishuxx.com/zhuanli/20240731/185846.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。