一种面向巡警事故追捕的地空子母机系统
- 国知局
- 2024-07-31 20:27:47
本发明属于城市执法与无人机无人车的应用领域,特别是涉及一种面向巡警事故追捕的地空子母机系统。
背景技术:
1、城市突发事件的信息采集存在时间、空间、规模等方面的诸多不确定性,实现复杂,现有信息采集手段的有效性方面存在不足。警用无人机可以弥补上述不足,发挥不可替代的作用。然而目前的警用无人机一方面,专业培训滞后,飞行训练缺失,飞行人员和无人机维护人员奇缺,经常出现有无人机配备却无专业驾驶人员,“买了不会用,想用不敢用,用了不管用”的现象普遍存在;另一方面,由于没有事先规划好任务规划和航线规划行动预案,导致当出现突发事件时无人机无法及时安装预案及时进行巡查布控。
技术实现思路
1、本发明的目的是提供一种面向巡警事故追捕的地空子母机系统,以解决上述现有技术存在的问题。本发明将母机放置在街道上进行7*24h的巡逻,通过深度相机和无线通讯模块,将巡逻画面实时上传至云端,由警务人员通过云端读取视频数据进行监控。如果发现行人闯红灯、快递外卖电动车横冲直撞、违规停车等交通违法问题则利用母机的扬声器进行远程劝阻教育,并且对不听劝阻的违法者进行记录并派出警务人员对其进行登记和处罚。以此来达到治理行人闯红灯、违规停车等交通违法行为的目的。同时接到报警时子机将出动前往现场进行布控,当发现违法目标时将会进行目标追踪,协助抓捕违法人员。
2、为实现上述目的,本发明提供了一种面向巡警事故追捕的地空子母机系统,包括:
3、母机,所述的母机由母机感知系统、母机的执行系统、子机收放与充电系统,母机控制系统组成;子机,所述的子机由子机感知系统、子机控制系统组成;子机与母机的通信系统。
4、进一步的,所述的母机感知系统包括三维激光雷达一、深度相机一和报警按钮;所述的三维激光雷达一安装在机体的顶端,用于避障和建图导航,所述的深度相机一安装在机体前方,用于观察是否有违法行为发生,所述的报警按钮安装在机体的侧面,长按三秒报警按钮一键报警。
5、进一步的,所述的母机执行系统包括扬声器、储物空间;所述扬声器位于机体右前侧方,用于警告和传话;所述的储物空间位于机体内部中下方位置,在储物空间侧面开设小门;
6、进一步的,所述的子机收放与充电系统包括电池箱及充电接口:所述电池箱及充电接口于机体后部下方,电池箱内部安装有电池组以及电机运动单元,用于推动机体移动,充电接口采用无线线圈对子机实现无接触充电。
7、进一步的,所述的子机感知系统包括三维激光雷达二、深度相机二;所述的三维激光雷达二位于机体中部,用于获取子机周围的障碍信息,实现避障和导航的功能;所述的深度相机二位于子机底部,用于获取地面图像,回传给母机进行处理,同时可以对目标进行识别与追踪。
8、进一步的,所述的母机控制系统包括母机的决策流程;所述的母机的程序流程为:首先,地空子母机预设巡航路径,利用三维激光雷达一进行自主避障,并按照预设路径巡检;系统有两种方式来接收群众报警,一是判断是否有群众按下报警按钮,二是警务人员通过母机的深度相机一判断有无违法行为发生;
9、其次,在接到群众报警,或发现违法行为且无法口头制止时,则母机接到任务出警,此时,释放子机前往现场,目标跟踪罪犯并抓捕罪犯。
10、进一步的,所述的子机控制系统包括子机的决策流程;所述的子机的程序流程为:子机接到出警任务后,子机执行的功能包括,三维激光雷达二获取周围信息、接收母机操控信号前往现场、子机深度相机二拍摄图片上传、子机识别罪犯进行目标追踪,并且使用扬声器警告违法人员不要继续违法,尝试制止违法行为的进一步进行。
11、进一步的,所述的子机与母机的通信系统,包括有移动网络和wifi网络接受发射装置,确保能实时将深度相机拍摄到的画面实时传回云端由警务人员查看,同时可以将子机深度相机拍摄的地面照片传回母机,然后母机对图片进行处理并控制子机进行目标追踪。
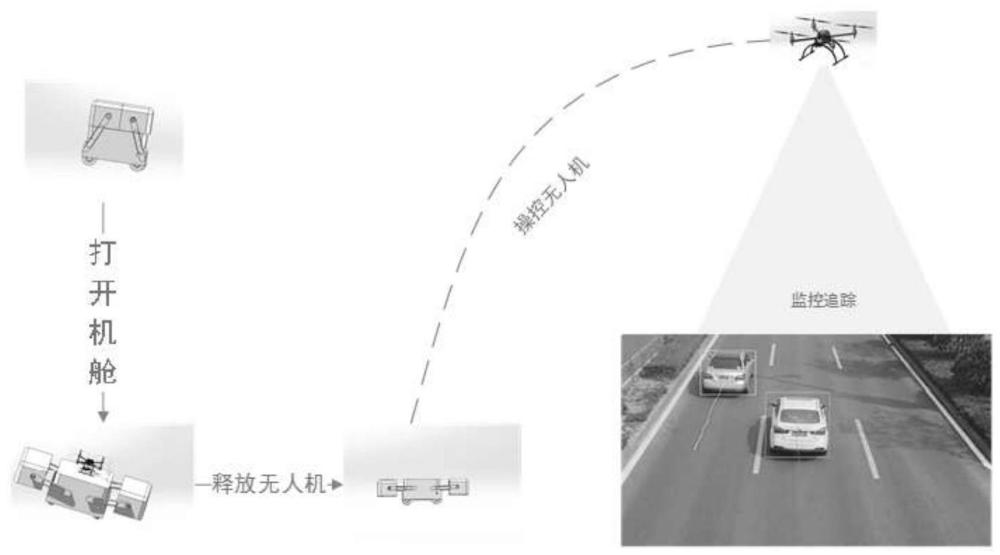
12、本发明的优点是:本发明在日常巡逻中子机位于母机中待机,等待任务下发和执行,母机则沿街巡逻,观察是否有违法行为发生;当有任务时母机将打开机舱释放出子机,由子机先行前往可疑路口进行布控,当发现可以目标后进行自动追踪;在子机前往可疑路口的过程中将路过的地面路况信息传给母机,让母机规划最快路径前往可疑路口待命以防止意外情况发生;本发明由一母机搭配双子机的组合模式,能够释放两台子机同时监控多个路口,并且在锁定追踪目标后空闲子机返回母机充电,当追踪子机电量过低时返回母机充电由空闲子机前往接替工作。
技术特征:1.一种面向巡警事故追捕的地空子母机系统,其特征在于,包括有:
2.根据权利要求1所述的一种面向巡警事故追捕的地空子母机系统,其特征在于,
3.根据权利要求1所述的一种面向巡警事故追捕的地空子母机系统,其特征在于,
4.根据权利要求1所述的一种面向巡警事故追捕的地空子母机系统,其特征在于,
5.根据权利要求1所述的一种面向巡警事故追捕的地空子母机系统,其特征在于,
6.根据权利要求1所述的一种面向巡警事故追捕的地空子母机系统,其特征在于,
7.根据权利要求1所述的一种面向巡警事故追捕的地空子母机系统,其特征在于,
8.根据权利要求1所述的一种面向巡警事故追捕的地空子母机系统,其特征在于,
技术总结本发明公开了一种面向巡警事故追捕的地空子母机系统。本发明包括地面无人车基站的母机系统,无人机巡检的子机系统。母机装配了三维激光雷达、深度相机,用于判断场景中是否有违法行为发生。母机系统装配了通信模块,用于指挥无人机巡逻和罪犯追捕。母机为提供移动充电功能,用于延长无人机巡警时间。子机可以无视地形实现高速犯罪人员追捕。子机系统装配了三维激光雷达、深度相机,可以实现巡警事故场景中,犯罪人员、道路、车辆、建筑环境的可视化重建。本发明结合地面母机的通信和续航能力,空中子机的无障碍移动和场景信息感知能力,可以有效协助犯罪人员追捕行动。当出警时母机打开机舱,释放出子机,并由母机操控子机进行监控追踪。技术研发人员:李志军,吴克伟,于磊,郑雅楠,陈项雨,高旭杰,王天齐,代波,谢昭受保护的技术使用者:合肥工业大学技术研发日:技术公布日:2024/5/16本文地址:https://www.jishuxx.com/zhuanli/20240731/186313.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表