一种轨迹数据驱动的高速公路行车风险识别方法
- 国知局
- 2024-07-31 20:28:11
本发明涉及道路交通安全,具体涉及一种高速公路道路交通安全预警技术方法。
背景技术:
1、高速公路作为道路的重要组成部分,由于全程封闭、行驶速度高、出入口间距长等特点,一旦发生交通事故,往往会引发连锁反应,造成不可估量的后果,如果能对高速公路事故风险进行提前预警,对提高高速公路的交通安全管理水平具有重要意义。车辆从无到有发生事故可以分为四个阶段:知险、辨险、避险、遇险。如果在最早的知险阶段就能给驾驶员提供预警信息,这对预防事故的发生有很重要的意义。早期研究中,借助线圈采集的宏观交通流数据对高速公路行车风险进行识别是主流,而基于微观的车辆行驶轨迹数据进行高速公路行车风险的研究相对较少,此类研究有着很好的应用前景。
技术实现思路
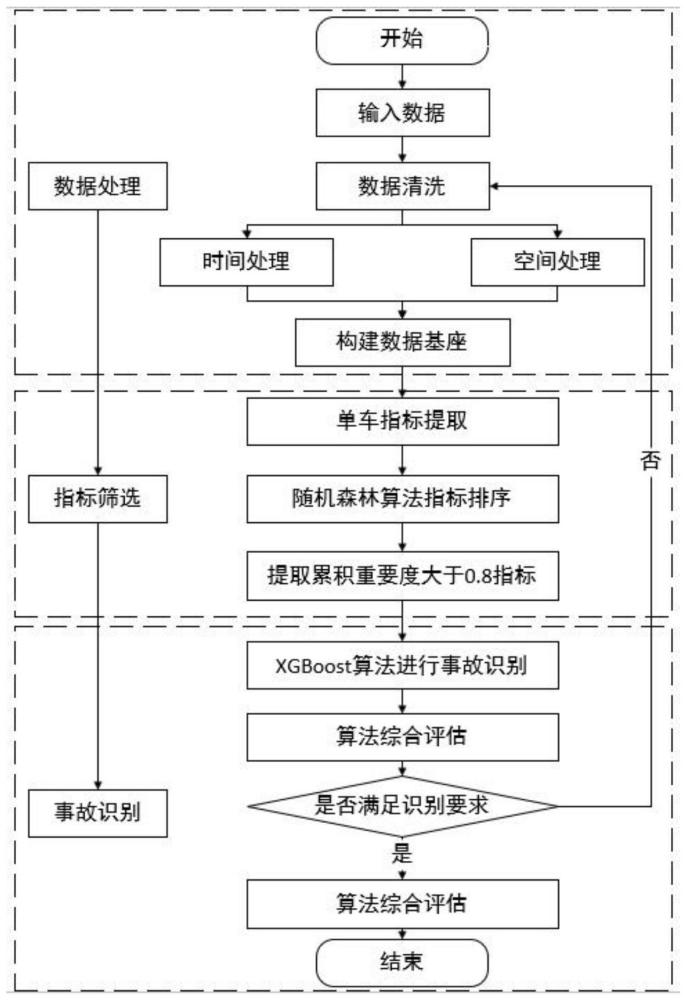
1、本发明针对上述现有技术存在的不足,第一方面,提出一种轨迹数据驱动的高速公路行车风险识别方法,包括下述步骤:
2、获取高速公路的事故数据以及与之匹配的机动车轨迹数据;
3、根据高速公路事故发生的时间和地点分别从时间和空间角度对轨迹数据进行时空筛选;
4、构建不同时空条件下的高速公路行车风险识别研究数据基座;
5、计算高速公路行车风险识别的基础指标;
6、对风险识别的基础指标的重要度进行计算和排序;
7、计算累计指标重要度,给定累积指标重要度阈值,选取满足阈值要求的所有指标用于后续的风险识别;
8、进行不同时空条件下的高速公路行车安全风险识别测试;
9、通过组合算法指标评估最合适的时空条件用于事故风险的识别。
10、在上述方案的基础上,所述时空筛选具体为:
11、时间筛选通过轨迹数据的时间信息直接筛选;
12、空间筛选使用半正矢公式计算事故地点与车辆的距离,通过事故点与车辆轨迹数据的经纬度计算,求得的距离等价于高速公路直线段车辆与事故地点的距离;半正矢公式为:
13、
14、其中,d是两点之间的距离;r是球的半径;φ1,φ2是点1的纬度和点2的纬度;λ1,λ2是点1的经度和点2的经度。
15、在上述方案的基础上,筛选事故发生前的5min~15min以及事故发生上游的5km~15km的数据。
16、在上述方案的基础上,所述风险识别指标xj的基于分类准确率的变量重要性度量dj的计算步骤如下所示:
17、
18、其中,dj是风险识别指标的指标重要度;b表示算法的训练样本个数;表示使用随机森林算法对数据进行分类的正确分类个数;表示改变风险识别指标xj的值后使用随机森林算法对数据进行分类的正确分类个数。
19、在上述方案的基础上,所述高速公路行车安全风险识别测试具体为使用随机森林筛选出的指标结合xgboost算法进行高速公路行车安全风险识别;
20、高速公路行车风险识别公式为:
21、
22、其中,是事故风险研判的最终预测结果,函数fk是xgboost算法中第k个独立的分类回归树,fk(xi)是第k个独立的分类回归树上第i个样本的预测值,f是k个独立的分类回归树构成的数据集。
23、在上述方案的基础上,所述组合算法指标具体为准确率、精确率、召回率和f1值。
24、第二方面,提供一种电子装置,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现第一方面中所述的方法的步骤。
25、第三方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现第一方面中所述的方法的步骤。
26、本发明的有益效果:
27、第一,本发明解决了在高速公路上,车辆在行驶过程存在潜在的行车风险难以识别的问题,实现了一种在高速公路上车辆知险并进行预防的方法。
28、第二,当前主流的高速公路行车风险研究多借助宏观交通流的参数,本发明将研究重点集中于微观交通流参数,如车辆的速度及加速度等指标用于高速公路的行车风险识别。
29、第三,本发明的研究主体是基于轨迹数据,对象选择的是小汽车,随着数据基座的不断完善,数据主体的扩充,本发明也可以迁移至“两客一危”车辆上。
30、第四,本发明会随着轨迹数据质量的提高而更具有参考价值,随着国家自行研制的全球卫星导航系统北斗卫星导航系统的不断成熟发展,本发明更具有研究前景。
31、第五,本发明在算法上容易实现,流程简单易懂,较传统方法相比有着更高的行车风险识别精度,可以为交通管理部门提供参考建议,对提高高速公路的交通安全管理水平具有重要意义。
技术特征:1.一种轨迹数据驱动的高速公路行车风险识别方法,其特征在于,包括下述步骤:
2.如权利要求1所述的一种轨迹数据驱动的高速公路行车风险识别方法,其特征在于,所述时空筛选具体方法为:
3.如权利要求2所述的一种轨迹数据驱动的高速公路行车风险识别方法,其特征在于,筛选事故发生前的5min~15min以及事故发生上游的5km~15km的数据。
4.如权利要求1所述的一种轨迹数据驱动的高速公路行车风险识别方法,其特征在于,所述风险识别指标xj的基于分类准确率的变量重要性度量dj的计算步骤如下所示:
5.如权利要求1所述的一种轨迹数据驱动的高速公路行车风险识别方法,其特征在于,所述高速公路行车安全风险识别测试具体为使用随机森林筛选出的指标结合xgboost算法进行高速公路行车安全风险识别;
6.如权利要求1所述的一种轨迹数据驱动的高速公路行车风险识别方法,其特征在于,所述组合算法指标具体为准确率、精确率、召回率和f1值。
7.一种电子装置,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述方法的步骤。
8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述方法的步骤。
技术总结本发明公开了一种基于车辆轨迹数据的高速公路行车安全风险主动识别方法。具体包括:基于高速公路机动车的历史轨迹数据建立数据基座;根据轨迹数据中车辆的速度信息以及其他相关指标提取出相应的风险研判指标;使用随机森林与XGBoost的组合算法对指标的重要度进行研判,设定指标累积重要度阈值,将指标重要度按照从大到小的顺序进行累加,筛选出累积重要度大于阈值的所有指标,将这些指标结合XGBoost算法用于事故风险的识别(即有无可能发生事故)。本发明在高速公路行车安全风险识别有着较高的精度,可以为高速公路事故风险研判和动态预警提供方法支撑。技术研发人员:许博,董春娇,李鹏辉,万雨杰,杨妙言受保护的技术使用者:北京交通大学技术研发日:技术公布日:2024/5/16本文地址:https://www.jishuxx.com/zhuanli/20240731/186341.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表