一种基于时空依赖增强网络的交通速度预测方法
- 国知局
- 2024-07-31 20:33:22
本发明涉及一种交通速度预测方法,特别涉及一种基于时空依赖增强网络的交通速度预测方法。
背景技术:
1、近年来,伴随着城市车辆的日益增长,人们生产生活带来的交通拥堵时长大幅度增加。城市迫切需要有效的交通管理及控制方式来避免交通拥堵,交通预测任务在此方面的重要性显现出来。交通预测旨在挖掘历史交通数据信息进而给出未来一段时间内合理的道路交通状况,如交通速度。预测路段中的交通速度可以帮助行人提前规划路线从而避免驶入错误匝道,同时确定未来路段是否拥堵以提升市民出行体验。因而,交通预测已成为智能交通系统重要的组成部分。
2、交通速度数据是由部署在多个路段上的传感器记录的多变量时间序列数据,其不仅具有周期性的时间变化模式还包含邻接关系等空间关联属性。因而,交通速度预测需要基于时空网络的模型来捕捉交通速度数据中的时空依赖并对未来做出预测,这使得交通速度预测仍然是一项具有挑战性的任务。
3、早期研究者们通过数学统计学模型对交通速度进行预测。统计学模型算法简单,运算速度快,难以捕捉交通速度的非线性关系使得其准确性较低。随着高泛化性与高度非线性能力的深度学习在计算机视觉等不同研究领域中大放异彩,基于深度学习的交通速度预测被广泛应用。但是,现有基于时空网络的交通速度预测模型仍难以满足准确且高效的交通预测需求。主要原因在于交通数据与文本数据不同,其具有复杂的时空属性,现有模型难以有效挖掘时间变化模型,也无法高效捕获空间信息传递。
技术实现思路
1、本发明目的在于针对上述现有技术的缺陷和不足,提出了一种基于时空依赖增强网络的交通速度预测方法,该方法包括时间依赖增强模块和空间依赖增强模块,以加强捕捉交通速度数据中的时间和空间相关性。在gru的每个时间步中引入attention机制,构成gru-attention,以加强gru捕捉上下文的能力;引入季节趋势性分解以分解交通速度数据的季节性和趋势性,以便于gru-attention捕捉;gru-attention与周期趋势分解构成时间依赖增强模块来加强动态时间依赖型的建模。采用图注意力网络构成空间依赖增强模块来动态建模不同节点间的空间依赖性,以便适应交通速度数据高度复杂的空间相关性,增强模型的鲁棒性。
2、本发明为解决上述技术问题采用以下技术方案:一种基于时空依赖增强网络的交通速度预测方法,用于提高对交通速度预测的精度,包括如下步骤:
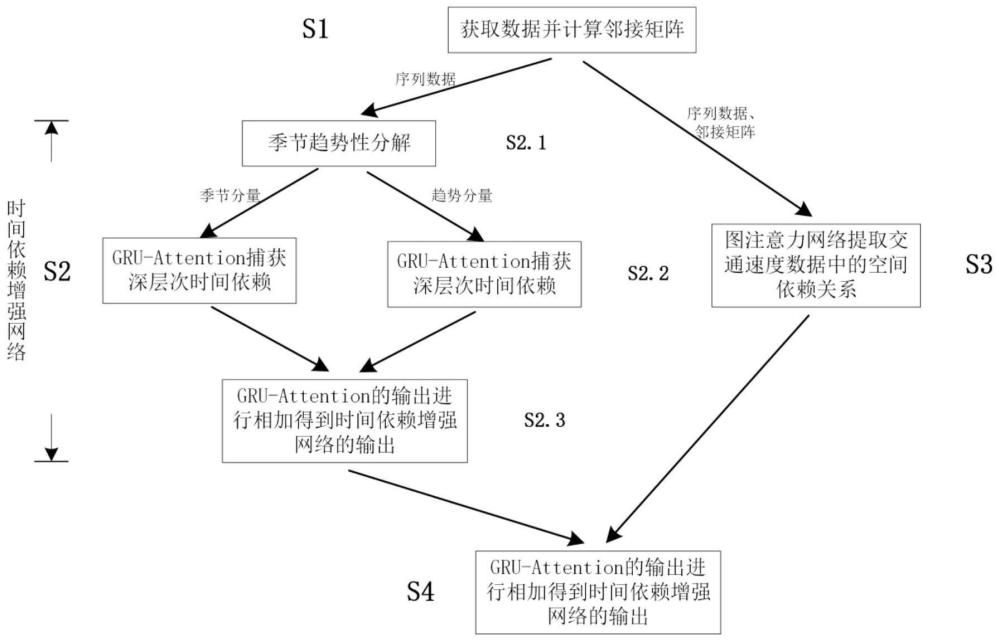
3、步骤s1:获取加利福尼亚高速的数据集pemsd7,设置时间分辨率并基于传感器节点间的距离来计算道路图的邻接矩阵,分别进入步骤s2、s3;
4、步骤s2:将我们采集到的数据集进行预处理后输入时间依赖增强网络;
5、步骤s2.1:对交通速度数据作季节趋势性分解以提取交通数据的季节分量和趋势分量,并进入步骤s2.2;
6、步骤s2.2:提出基于gru的gru-attention,分别对s2.1步骤中得到的季节分量和趋势分量进行捕获深层次的时间依赖,并进入步骤s2.3;
7、步骤s2.3:将步骤s2.2中获得的两个输出进行相加得到时间依赖增强网络的输出;
8、步骤s3:将s1步骤的交通速度数据和邻接矩阵输入到图注意力网络中,实现对交通速度数据空间依赖建模的预测输出,并进入步骤s4;
9、步骤s4:将s2和s4的输出作为全连接层的输入,从而得到本模型的预测结果,完成本方法所述的预测结果。
10、作为本发明的一种优选方案:所述步骤s1中,设置时间分辨率为5min,通过如下公式计算邻接矩阵:
11、
12、其中,wij是由dij(站点i与站点j之间的距离)决定的边的权重。σ2和∈是控制矩阵w的分布和稀疏性的阈值,分别被分配为10和0.5。
13、作为本发明的一种优选方案:所述步骤s2中,对我们采集到的交通速度数据进行详细地划分训练集、测试集以及验证集,然后对这三部分的数据进行标准化、归一化后,之后将数据转换为我们所需要的张量格式。
14、作为本发明的一种优选方案:所述步骤s2.1中,采用移动平均方法作为季节趋势性分解算法。对长度为n的时间序列v∈rn×n,序列分解可表示为:
15、vt=avgpool(padding(v))
16、vs=v-vt
17、其中,vt,vs∈rn×n表示趋势分量和季节分量,avgpool(·)为移动平均,padding保持序列长度不变。
18、作为本发明的一种优选方案:所述步骤s2.2中,基于gru提出了一种gru-attention模型。将t时间步的attention中的q,k,v分别定义为将ht,ht-1及ht-1经过线性层转换得到的值,ht为t时间步gru输出的隐藏状态,ht-1为t-1时间步的隐藏状态。引入余弦相似性以计算q与k之间的相似性,通过softmax函数计算t时间步隐藏状态与t-1时间步隐藏状态之间的权重系数:
19、
20、上述公式中,||·||表示计算向量的模,表示计算q、k之间的余弦相似度,attentionvalue表示相邻时间步间的权重系数。
21、将权重系数与v相乘得到注意力权重值,加强t时间步与t-1时间步间的依赖。更新t时间步隐藏状态作为t+1时间步的输入,使得t+1时间步的输入可以通过注意力权重值来更好地获取上下文信息:
22、ht=attentionvalue+ht_pre
23、上述公式中,ht表示更新后的t时间步的隐藏状态,ht_pre表示更新前的t时间步的隐藏状态。
24、作为本发明的一种优选方案:所述步骤s2.3中,将步骤s2.2中获得的两个输出进行相加得到时间依赖增强网络的输出:
25、ytemp=gru attention(vt)+gruattention(vs)
26、上述公式中,vt表示趋势分量,vs表示季节分量,gru attention(·)表示经过gru-attention层进行计算,ytemp表示时间依赖增强网络的输出。
27、作为本发明的一种优选方案:所述步骤s3中,基于图注意力网络来提取交通速度数据中的空间依赖部分,其输入包含时间序列数据以及s1步骤中计算所得邻接矩阵。图注意力网络由多个功能相同的图注意力层组成,针对图注意力层,定义一个可学习的线性变换将输入特征转换为更高级的特征,其中a是注意力系数,为输入节点特征,w为权重参数,eij表示节点j对节点i特征的重要性。使用softmax对中心节点的邻居节点做归一化,其中ni表示邻居节点:
28、
29、对输入特征的加权得到输出特征
30、
31、上述公式中,σ表示lekyrelu激活函数,αij表示节点i与节点j之间的注意力系数。
32、为稳定自注意力的学习过程,gat使用多头注意力机制,使用k组相互独立的单头注意力层,对其结果进行拼接:
33、
34、其中||表示拼接,是第k个注意力机制计算的归一化注意力系数,wk是第k个模块的权重系数,σ表示lekyrelu激活函数。为减少特征向量的维度,我们使用平均操作代替拼接操作:
35、
36、作为本发明的一种优选方案:所述步骤s4中,将步骤s2与步骤s3中所提取的关于时间依赖与空间依赖的输出进行拼接,得到全连接层的输入,经过全连接层后得到我们最终所需要的预测结果ypred=fullyconnect(concat(yt,ys))。其中,yt表示时间依赖增强网络的输出,ys表示空间依赖增强网络的输出,concat(·)表示拼接操作,fully connect(·)表示经过了一个全连接层,ypred表示最终得到的预测结果。
37、有效效果:
38、1、本发明设计的一种基于时空依赖增强网络的交通速度预测方法,采用时间依赖增强网络学习交通速度数据序列中时间相关性,其中,利用季节趋势性分解来处理交通数据序列中的季节性和趋势性,引入gru-attention来学习经过季节趋势性分解得到的分量中的时间依赖关系。
39、2、本发明采用图注意力网络来学习交通速度数据序列中的空间依赖关系,并将时间依赖增强网络的输出与图注意力网络构成的空间依赖增强网络的输出进行拼接作为全连接层的输入,从而得到最终的预测结果,提高交通速度预测的精度。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186856.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表