自动停车系统与自动停车方法与流程
- 国知局
- 2024-07-31 20:35:31
本发明涉及一种自动停车系统与自动停车方法。
背景技术:
1、近年来,提供对于也考虑了交通参与人中处于弱势立场的人的可持续输送系统的存取的努力正在活跃化。为了实现所述目的,通过与自动驾驶技术有关的研究开发而致力于更进一步改善交通的安全性或便利性的研究开发。
2、在既有的自动停车系统中,车辆是通过摆动/转向到目标停车位来进行停车的。但是,如果想在一个有死路的停车场的最里面的车位停车,由于空间问题,车辆很难在该空间内进行摆动/转向到目标停车位,故自动泊车不能被执行。
3、专利文献1提供一种技术,使自动代客泊车不受停车场结构限制的影响,并可以后退停车。根据专利文献1,其从控制服务器获取空置车位信息,驶入空置车位,进行车辆的摆动/转向而进行自动停车。由此,可以避免对停车场的结构性限制。
4、专利文献
5、专利文献1:特开2021-184168
6、但是,在现有技术的情境中,如果空置车位是“公共车位”,则即使驶入也不存在伦理问题。但是,如果空置车位是被用户承租为“承租车位”(例如,月租停车场),则驶入该空置车位(当时没有停车)时,可能会有来自承包用户的投诉。
7、可是,在自动驾驶技术中,在具有死路的停车场域中,不驶入作为承租空间的空置空间,以执行自动停车控制是课题。还有,希望可以是尽可能不妨碍存在于移动体周围的周边移动体的交通的动作。
技术实现思路
1、本案为了解决所述课题而以达成在具有死路的停车场域中不驶入作为承租空间的空置空间,以执行自动停车控制为目的。而且,进而有助于发展可持续输送系统。
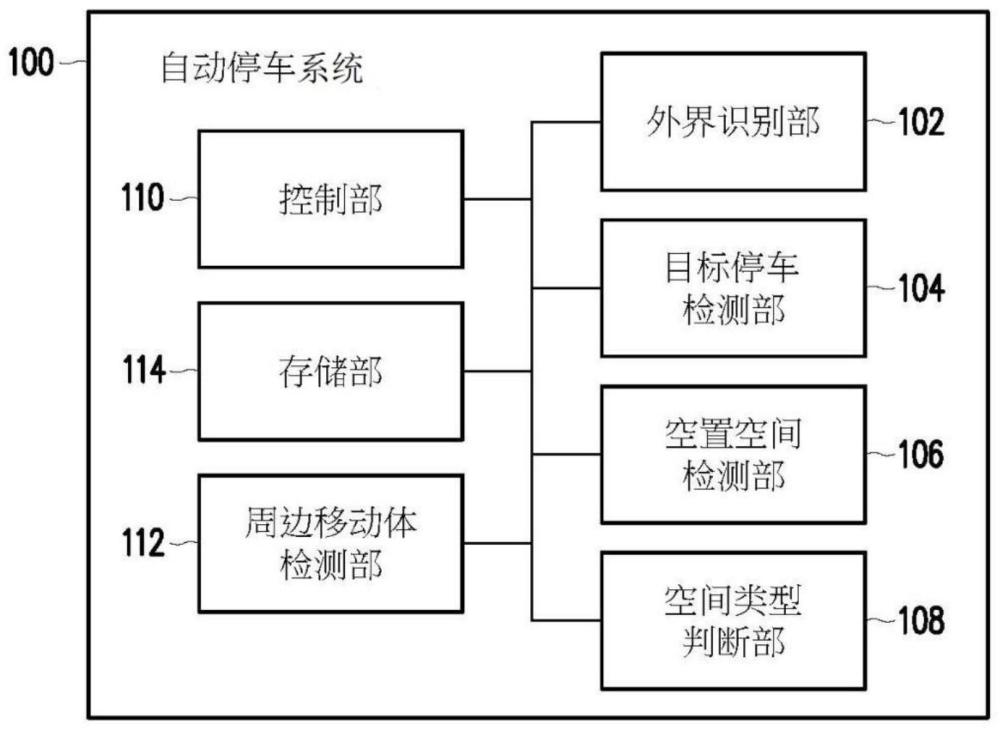
2、根据本发明一实施方式,提供一种自动停车系统,包括:外界识别单元,获取移动体的外界的识别数据;目标停车检测部,根据所述外界的所述识别数据检测目标停车位置;控制部,计算所述移动体移动到所述目标停车位置的行进轨迹并进行自动停车控制;空置空间检测部,基于所述外界的所述识别数据检测所述移动体与所述目标停车位置的周围的空置空间;空间类型判断部,判断所述空置空间的类型。在所述空置空间被判断为公共空间时,所述控制部生成包括所述空置空间的行驶/停车轨迹。
3、根据本发明一实施方式,在所述自动停车系统中,在所述空置空间被判断为承租空间,所述控制部则生成不包括所述空置空间的行驶/停车轨迹。
4、根据本发明一实施方式,在所述自动停车系统中,在所述空置空间被判断为所述承租空间,所述控制部则生成包括与所述空置空间不同的特定位置的行驶/停车轨迹。
5、根据本发明一实施方式,所述自动停车系统还包括周边移动体检测部,其检测存在于所述移动体附近的周边移动体。在所述空置空间被判断为所述公共空间时,且从所述周边移动体的运动轨迹判断为所述周边移动体使用所述公共空间时,所述控制部生成不包括所述空置空间的行驶/停车轨迹。
6、根据本发明一实施方式,在所述自动停车系统中,在所述空置空间被判断为所述公共空间时,且从所述周边移动体的运动轨迹判断为所述周边移动体不使用所述公共空间时,所述控制部基于所述周边移动体的移动状态,生成包括所述空置白空间的行驶/停车轨迹。
7、根据本发明一实施方式,在所述自动停车系统中,在所述空置空间被判断为承租空间时,所述周边移动体为接续在所述移动体之后,且所述周边移动体使用所述公共空间时,所述控制部从使所述周边移动体超越所述移动体起,生成包括与所述空置空间不同的特定位置的行驶/停车轨迹。
8、根据本发明一实施方式,在所述自动停车系统中,在所述空置空间没有被检测出、也没有被判断为所述公共空间、且被判断为承租空间时,在不使用包括所述空置空间的行驶/停车轨迹的话无法执行所述自动停车控制时,所述控制部不执行所述自动停车控制,或变更所述目标停车位置。
9、根据本发明一实施方式,在所述自动停车系统中,所述空间类型判断部执行:基于所述外界的所述识别数据,存储过去使用过所述空置空间的特定移动体;在与所述特定移动体相异的其他移动体使用所述空置空间时,判断所述空置空间为所述公共空间;及在所述特定移动体在规定期间使用过所述空置空间时,判断所述空置空间为承租空间。
10、根据本发明一实施方式,在所述自动停车系统中,所述空间类型判断部基于所述外界的所述识别数据检测到表示承租空间的标示时,则判断为所述承租空间。
11、根据本发明一实施方式,在所述自动停车系统中,所述空间类型判断部基于全球定位系统所产生的地图数据和导航数据,来判断所述空置空间是否为承租空间。
12、根据本发明另一实施方式,提供一种自动停车方法,包括:获取移动体的外界的识别数据;根据所述外界的所述识别数据检测目标停车位置;计算所述移动体移动到所述目标停车位置的行进轨迹并进行自动停车控制;基于所述外界的所述识别数据检测所述移动体与所述目标停车位置的周围的空置空间;判断所述空置空间的类型;及在所述空置空间被判断为公共空间时,生成包括所述空置空间的行驶/停车轨迹。
13、根据本发明一实施方式,在所述自动停车方法中,在所述空置空间被判断为承租空间,生成不包括所述空置空间的行驶/停车轨迹。
14、根据本发明一实施方式,在所述自动停车方法中,在所述空置空间被判断为所述承租空间,生成包括与所述空置空间不同的特定位置的行驶/停车轨迹。
15、根据本发明一实施方式,所述自动停车方法还包括:基于所述外界的所述识别数据,存储过去使用过所述空置空间的特定移动体;在与所述特定移动体相异的其他移动体使用所述空置空间时,判断所述空置空间为所述公共空间;及在所述特定移动体在规定期间使用过所述空置空间时,判断所述空置空间为承租空间。
16、根据本发明一实施方式,所述自动停车方法还包括:基于所述外界的所述识别数据检测到表示承租空间的标示时,则判断为所述承租空间。
17、根据上述实施方式,在进行自动停车控制时,会判断是否有公共空间来生成行驶轨迹。因此,如果有公共空间,控制部可以增加行驶轨迹的模式,自动停车控制的执行频率可以增加,进而提高可用性。由于可以增加行驶轨迹的模式,因此可以选择尽可能不妨碍周边移动体交通的行驶轨迹(动作)。此外,在没有公共空间的情况下,通过基于移动体与目标停车位置之间的位置关系来生成行驶轨迹,由此可以防止来自承租空间或私人土地的用户的投诉。
技术特征:1.一种自动停车系统,其特征在于,包括:
2.根据权利要求1所述的自动停车系统,其特征在于,
3.根据权利要求2所述的自动停车系统,其特征在于,
4.根据权利要求1所述的自动停车系统,其特征在于,
5.根据权利要求4所述的自动停车系统,其特征在于,
6.根据权利要求4所述的自动停车系统,其特征在于,
7.根据权利要求1所述的自动停车系统,其特征在于,
8.根据权利要求1所述的自动停车系统,其特征在于,
9.根据权利要求1所述的自动停车系统,其特征在于,
10.根据权利要求1所述的自动停车系统,其特征在于,
11.一种自动停车方法,其特征在于,包括:
12.根据权利要求11所述的自动停车方法,其特征在于,
13.根据权利要求12所述的自动停车方法,其特征在于,
14.根据权利要求11所述的自动停车方法,其特征在于,还包括:
15.根据权利要求11述的自动停车方法,其特征在于,还包括:
技术总结本发明提供一种自动停车系统与自动停车方法。自动停车系统包括:外界识别部,获取移动体的外界的识别数据;目标停车检测部,根据所述外界的所述识别数据检测目标停车位置;控制部,计算所述移动体移动到所述目标停车位置的行进轨迹并进行自动停车控制;空置空间检测部,基于所述外界的所述识别数据检测所述移动体与所述目标停车位置的周围的空置空间;空间类型判断部,判断所述空置空间的类型。在所述空置空间被判断为公共空间时,所述控制部生成包括所述空置空间的行驶/停车轨迹。技术研发人员:石川翔太,岩﨑瞬,冈敬祐受保护的技术使用者:本田技研工业株式会社技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240731/187012.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。