一种带无线充电车道的合流区电动汽车生态驾驶控制方法
- 国知局
- 2024-07-31 20:37:15
本发明涉及一种带无线充电车道的合流区电动汽车生态驾驶控制方法,属于交通工程、电池设备和交通仿真。
背景技术:
1、智能网联车辆(intelligent connected vehicles,icvs)是指利用先进的信息通信技术与车辆技术相结合,实现车辆与车辆(v2v)、车辆与基础设施(v2i)以及车辆与云端(v2c)之间的高效连接与通信的车辆系统。智能网联车辆通过感知、通信和决策等技术,实现了车辆之间的实时交互和信息共享。它们能够感知周围的车辆、道路和环境信息,通过车联网技术将这些信息传输到其他车辆、交通基础设施和云端平台,同时接收和处理来自其他车辆和基础设施的信息。基于这些信息,智能网联车辆可以做出更智能的决策,提高行驶的安全性、效率和舒适性。
2、电动车无线充电系统是一种新兴的交通系统,它利用无线功率传输技术(wireless power transfer,wpt)向车辆传输电力。如今wpt已经广泛应用于各种手持设备的充电,例如医疗设备、智能手机等。在静态无线充电摆脱了传统的电缆束缚后,人们转而把目光投向了更为便捷的动态无线充电技术(dynamic wireless charging,dwc)。dwc系统将充电线圈等基础设施嵌入在路面下,使得电动汽车在专用充电车道上边行驶边充电,而该专用车道称为电气化车道。电气化车道在一定程度上节约了电动汽车在城市里充电的时间和空间,缓解了驾驶员的里程焦虑。
3、目前,关于无线充电车道的长度、设施构造、传输功率、转化效率等工程问题的研究日益丰富,全世界越来越多的高校和企业投身于动态无线充电系统的研发中,其中包括计算机理论建模和落地实验。
4、现有的无线充电车道上研究主要在于车道基础设施本身,对于电动汽车在车道上的行为研究较少。考虑到道路上电动汽车本身电量差异性,在对车辆充电行为进行控制时也应当进行相应优化,如果单一将所有车辆采取统一的充电时间,那么便无法满足不同车辆的充电需求。
技术实现思路
1、本发明所要解决的技术问题在于:提供一种带无线充电车道的合流区电动汽车生态驾驶控制方法,它解决了若单一将所有车辆采用统一的充电时间,无法满足不同车辆的充电需求的问题。
2、本发明所要解决的技术问题采取以下技术方案来实现:
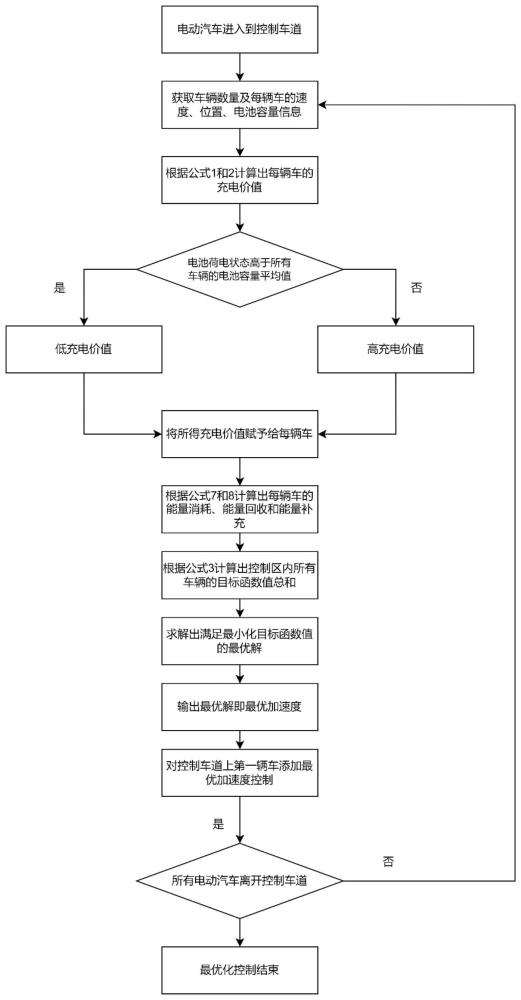
3、一种带无线充电车道的合流区电动汽车生态驾驶控制方法,包括以下步骤:
4、步骤1、获取车辆自身信息和交通环境信息,基于自身信息和交通环境信息,建立充电价值控制模型,即:
5、
6、
7、其中:k为图像的斜率,x0为图像中点对应的输入量值,xi为每辆车对应的自变量,soci为每辆车对应的电池容量,且soci取值范围为0~1,socall-avg为控制区内所有车辆的电池容量平均值,且socall-avg取值范围为0~1,socmax为每辆车对应的最大电池容量,且socmax取值范围为0~1;
8、步骤2、以主线车道和匝道交汇处为圆心,建立控制区,且按照距离交汇处最近到最远的顺序,控制区内每辆车的电池容量利用步骤1中的充电价值控制模型来计算充电价值系数,并对该控制区内的每辆车进行赋值;
9、步骤3、基于步骤2中的充电价值系数,建立目标函数,用于计算控制区内所有车辆目标函数总值;
10、其中,目标函数如下:
11、
12、其中:j是车辆控制输入量,即加速度a的集合,f是目标函数,w1为通行时间成本权重因子,ci表示控制区域内的车辆总数;δt表示预测控制每个时间步长;w2为净耗电量成本权重因子;为每辆车行驶过程中的耗电量,为每辆车通过动能回收获得的电量,λi表示车辆的充电价值系数,为每辆车的充电量;
13、步骤4、利用步骤3中的公式(3)测量目标函数总值,优化出主线与匝道车道上两辆头车的最优加速度值,并将其控制在头车上后,从而执行下一个第一时间步的加减速控制;
14、步骤5、剩余信息作为初始信息进入下一时间步的循环,即:依次循环步骤2-4,直到所有车辆离开控制区域则控制结束。
15、作为优选实例,在步骤1中,车辆自身信息包括车辆初始电量信息,车辆最大电池容量信息、车辆当前时刻的电池容量信息;
16、交通环境信息包括前后车速度信息、前后车位置信息、前后车加速度信息。
17、作为优选实例,在步骤2中,通过步骤1中的λi赋予给不同车辆,使不同车辆拥有各自的充电价值系数;即
18、利用公式(1),计算λi。
19、需要说明的是,电池荷电状态指的是车辆当前电池容量除以车辆最大电池容量的比值;
20、当电池荷电状态高于socall-avg时,此时得到低充电价值系数,否则会被得到高充电价值系数;
21、在带有无线充电车道的主线与匝道合流区域进行最优化控制,通过设置路侧信息检测单元收集信息并在计算机后台处理信息,检测区域半径为150m即控制区半径,而控制车道即无线充电车道在控制区内(需要说明的是,主线车道的一段和匝道的一段位于控制区半径内)。
22、作为优选实例,在步骤3中,econsumption、erecovery、echarge分别按照下列方法而得:
23、步骤3.1根据车辆的速度、加速度、道路特性和车辆特性来推导出车轮处瞬时功率pw(t),即:
24、
25、式中:m为车辆重量;a(t)、v(t)分别为车辆在t时刻的瞬时加速度和瞬时速度;g为重力加速度;θ为道路坡度;cr、c1和c2均为滚动阻力系数;ρair为空气密度系数;af为车辆迎风阻力面积;cd为空气阻力系数;
26、步骤3.2根据车轮处瞬时功率pw(t),计算牵引功率pt(t)和再生制动功率pr(t),即:
27、
28、式中:ηdl为动力传动系统效率参数;ηem为电机效率参数;ηbat为电池组效率参数,ηrb(t)满足下列关系式:
29、
30、步骤3.3根据牵引功率pt(t)和再生制动功率pr(t),计算电动汽车瞬时用电功率能耗enc,即:
31、
32、式中:t0为电动汽车进入充电区域的时间点;te为电动汽车离开充电区域的时间点;
33、步骤3.4电动汽车充电所获得的电能echarge按下列方式计算:
34、echarge=(pchargeη1)tcharge (8)
35、式中:pcharge为充电设施的功率;η1为充电的效率;tcharge为充电时间。
36、步骤3.5电动汽车的净能量损耗eac按照下列方式计算,即:
37、eac=econsumption-erecovery-echarge (9)
38、步骤3.6考虑到不同电量大小的电动汽车的充电需求亦有差别,将充电价值系数与echarge相结合可以有效调节充电过程,因此目标函数中净能量损耗按照下列方式计算,即:
39、
40、一种计算设备,包括处理器和用于存储处理器可执行程序的存储器,所述处理器执行存储器存储的程序时,实现如上所述方法。
41、一种存储介质,存储有程序,所述程序被处理器执行时实现如上所述方法。
42、本发明的有益效果是:本发明通过引入充电价值系数,调节在充电车道上的停留时间,实现控制区内所有车辆的“个性化”充电管理;
43、本发明充分考虑智能网联车和动态无线充电车道驾驶环境特征,不仅能够扩展交通流仿真模拟应用场景,同时也能够为智能网联车辆在动态无线充电车道速度控制提供参考;旨在分析智能网联车辆在动态无线充电车道上的驾驶行为特征,结合不同电量的电动汽车需求的差异化。能够反映不同充电价值系数下的充电过程,准确描述合流区智能网联车辆驾驶行为,对带有无线充电车道的合流区场景下的微观交通流仿真和自动驾驶车辆行为开发具有一定的指导意义,此控制方法使进入控制区的每辆智能网联电动汽车既安全高效地通过合流区,又使电动汽车在充电车道上的充电行为得到更好的优化。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187131.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表