一种考虑驾驶认知的无人船避碰决策方法与流程
- 国知局
- 2024-07-31 20:37:05
本发明涉及船舶交通安全,具体而言,尤其涉及一种考虑驾驶认知的无人船避碰决策方法。
背景技术:
1、目前,无人船技术日益受到关注,因其在海洋勘探、环境监测、水域巡逻等领域的广泛应用。为提高无人驾驶船舶智能避碰决策的合理性和实时性。有必要提供一种更先进、可靠的无人船避碰决策方法。
技术实现思路
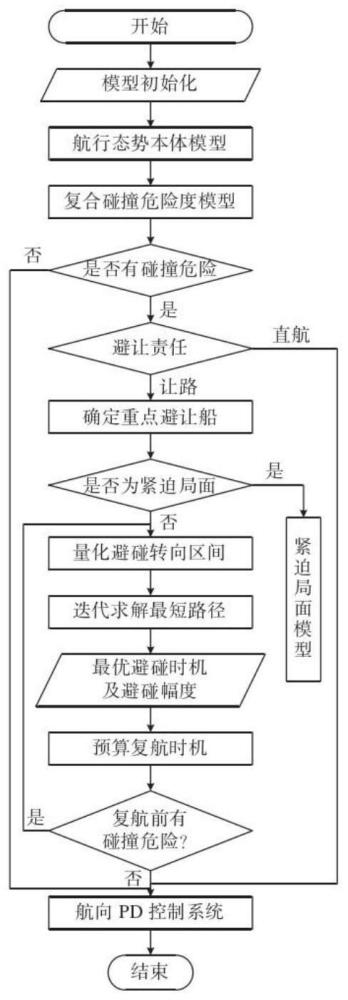
1、本发明提供一种考虑驾驶认知的无人船避碰决策方法。在进行船舶智能避碰决策方法研究的同时,充分考虑了决策的实时性、唯一性和合理性。构建无人驾驶船舶航行态势本体概念模型,并结合《国际海上避碰规则》及海员的通常做法对船舶会遇场景进行量化处理,建立船舶复合碰撞危险度评估模型,从驾驶实践的角度出发,建立驾驶员视角(bop)智能避碰决策模型,以船舶避碰总路径最短为目标函数求解最优避碰策略,实现船舶智能航行及自主避碰。
2、本发明采用的技术手段如下:
3、一种考虑驾驶认知的无人船避碰决策方法,包括以下步骤:
4、s1、接收传感器以及位置信息:作为感知层,系统配备先进的多传感器组合,包括但不限于雷达、激光测距仪、摄像头、水声传感器等,将航行姿态、位置信息、碍航物信息等提供给下游模块。
5、s2、建立无人驾驶船舶航行态势本体模型:利用本体模型的强大信息表述能力,可逻辑化表述并量化航行态势,结合驾驶实践,对先验航行知识进行描述,同时融合先验规划路径辅助避碰决策。
6、s3、建立多元复合避碰危险度评估模型:利用模糊理论建立dcpa、tcpa、两船距离、相对方位以及船速比这5个影响因素的隶属度函数,并依据驾驶实践构建了多元复合碰撞危险度评估模型。
7、s4、建立bop智能避碰决策模型:分析本船与目标船之间的相对运动几何关系,在保证船舶能在安全会遇距离驶过让清的基础上建立bop智能避碰决策模型,以船舶避碰总路径最短为目标函数,以《国际海上避碰规则》为约束条件,量化避碰转向区间,求解最优的避碰策略。
8、s5、智能船舶抵达终点后,算法结束,否则,循环s1-s4,直至船舶抵达终点。
9、进一步地,所述s2步骤实现过程如下:
10、通过对感知系统获取的多源异构信息进行实体与属性描述,建立无人驾驶船舶航行态势本体模型,然后在此基础上结合《国际海上避碰规则》及良好的船艺要求,将会遇场景(es)划分为12种,然后基于船舶航行态势本体模型及prolog语言建立航行态势理解与划分表。
11、同时,依据获取的电子海图信息构建栅格地图,根据以下公式进行基于a-star的路径搜索:
12、f(n)=g(n)+h(n)
13、其中,f(n)为从起点移动到目标方格的代价总和,n为目标方格的编号,g(n)为从起点移动到指定方格的移动代价,h(n)从指定方格移动到终点的估算代价,对于路径搜索问题,代价即为距离。
14、进一步地,所述s3步骤实现过程如下:
15、利用模糊理论建立了dcpa和tcpa、两船距离、相对方位以及船速比这5个影响因素的隶属度函数,并依据驾驶实践构建了多元复合碰撞危险度评估模型。
16、dcpa对避碰危险影响较大,dcpa的值越小,碰撞危险程度越高。任意时刻dcpa的隶属度函数udcpa为:
17、
18、式中,d1为最晚避让距离,d2为最小安全会遇距离。为简化计算,取2nmile。
19、tcpa是针对碰撞危险程度的评价指标。tcpa值越小,碰撞危险程度越高,任意时刻tcpa的隶属度函数utcpa为:
20、
21、式中,t1为碰撞危险度开始的时间,t2为最晚施舵点到最近会遇点的时间。
22、一般来说,船舶间距离越小,船舶间碰撞危险越大,且从避让难度上看,距离越小,避让效果越差。任意时刻两船间距离的隶属度函数ud为:
23、
24、
25、其中d1为最晚避让距离,通常取12倍船长值;d2为船舶协调避让的距离;q为目标船舷角。
26、处于不同方位的目标船舶对于碰撞危险度的影响也不同,一般来说,右舷大于左舷,正横前大于正横后。任意时刻舷角的隶属度函数uq为:
27、
28、其中,q0与船速比k=v1/v0相关.
29、
30、船速比越大,碰撞危险度越大,任意时刻船速比的隶属度函数uk为:
31、
32、其中,ψ为本船船航向。
33、综上,船舶碰撞危险度计算公式为cri为:
34、
35、其中,wd、wq、wk、wdcpa、wtcpa为权重系数。
36、进一步地,所述s4步骤实现过程如下:
37、分析本船与目标船之间的相对运动几何关系,在保证船舶能在安全会遇距离驶过让清的基础上建立bop智能避碰决策模型,以船舶避碰总路径最短为目标函数,以《国际海上避碰规则》为约束条件,量化避碰转向区间,求解最优的避碰策略。
38、当船舶存在碰撞危险时,需要根据船舶安全会遇距离,通过几何解算出避让幅度。在不同的位置采取避碰措施将导致船舶避让路径长度不同,为求取不同转向幅度下的船舶避碰最优路径,建立以下目标函数:
39、
40、式中:xk,yk分别为船舶当前的船位;xk+1,yk+1分别为船舶下一步的船位。
41、同时在进行避碰决策规划时需要考虑到无人船的三自由度运动学模型:
42、
43、
44、其中,x(t0),y(t0)分别为0时刻本船的横纵坐标,x(tn),y(tn)分别为n时刻本船的横纵坐标,θ(t)为t时刻船舶的旋转角。
45、较现有发明相比,本发明具有以下优点:
46、1、本发明设计了一种考虑驾驶认知的无人船避碰决策方法,提高了无人船在复杂环境中的智能避碰决策能力,增强决策结果的准确性和可靠性。
47、2、实现了贴合航海实践的无人船避碰决策,减少船舶对人工干预的依赖,提高任务执行的效率。
48、3、实现了实时与环境交互,做出符合《国际海上避碰规则》的避碰决策。
技术特征:1.一种考虑驾驶认知的无人船避碰决策方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种考虑驾驶认知的无人船避碰决策方法,其特征在于,所述s2步骤实现过程如下:
3.根据权利要求1所述的一种考虑驾驶认知的无人船避碰决策方法,其特征在于,所述s3步骤实现过程如下:
4.根据权利要求3所述的一种考虑驾驶认知的无人船避碰决策方法,其特征在于,所述s4步骤实现过程如下:
技术总结本专利涉及一种考虑驾驶认知的无人船避碰决策方法,通过结合《国际海上避碰规则》及海员的通常做法对船舶会遇场景进行量化处理,建立船舶复合碰撞危险度评估模型,从驾驶实践的角度出发,建立驾驶员视角智能避碰决策模型,以船舶避碰总路径最短为目标函数求解最优避碰策略。以实现无人船在复杂海洋环境中的智能避碰决策。技术研发人员:张新宇,金文,张翟容,王欢,王文忠受保护的技术使用者:江苏金海星导航科技有限公司技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240731/187119.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表