一种基于数字孪生的路口实时仿真方法与流程
- 国知局
- 2024-07-31 20:37:18
本发明涉及城市交通管理,具体为一种基于数字孪生的路口实时仿真方法。
背景技术:
1、在现代城市交通管理中,实时路口交通仿真和信号配时优化是极其重要的管理部分,传统的交通仿真方法能够模拟交通流量的变化,来对道路上的流量进行一定程度的仿真处理。
2、但是在实际道路场景中存在大量的细节,同时也会随着时间段的变化而产生改变,因此现有技术中的仿真方案无法准确反映实际交通状况的细节和实时性。当交通流量发生变化时,现有仿真技术中固定的信号配时方案可能会导致交通拥堵或者交通效率低下,且现有方案中对路口车辆行驶信息的采集过程费时费力,灵活性不足。因此,需要一种能够根据实际路口交通流量数据进行实时仿真和预测,并能够动态优化信号灯配时方案的方法。
技术实现思路
1、针对现有技术存在的不足,本发明目的是提供一种基于数字孪生的路口实时仿真方法,以解决上述背景技术中提出的问题,本发明将先进的数字孪生技术与实时数据采集和智能信号配时相结合,实现了对路口交通的精准模拟和动态优化,提高了对路口车辆行驶信息采集的精准性和灵活性。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:一种基于数字孪生的路口实时仿真方法,包括以下步骤:
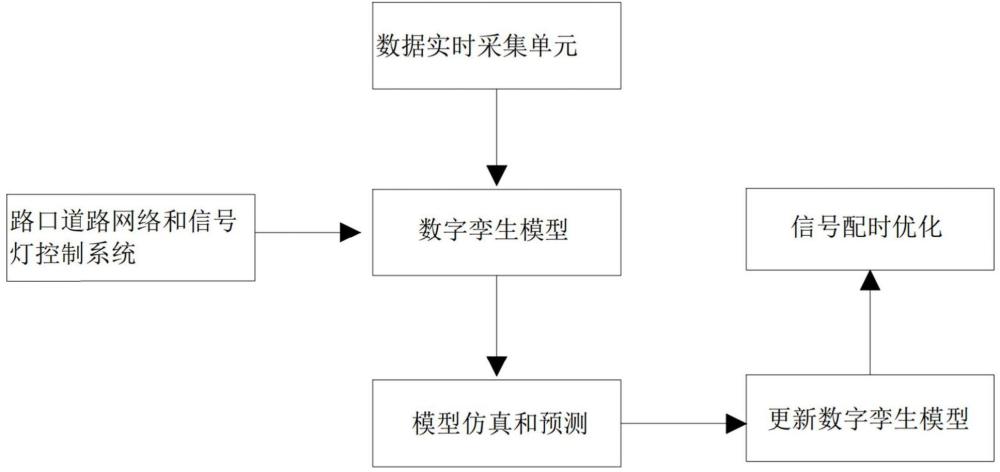
3、步骤一、用数字孪生技术,创建一个精确的数字孪生模型,基于路口道路网络和信号灯控制系统设定该数字孪生模型的基本参数;
4、步骤二、在路口范围内搭建移动框架,并根据移动框架底部车道数量搭建对应的独立采集单元,借助移动框架下方的底部支撑基座顶靠在路口的两侧,并将每个独立采集单元中的视觉采集模组以倾斜的状态朝向对应车道的中间进行照射,而激光测距模组垂直向下对该车道中间位置进行数据采集;
5、步骤三、通过激光测距模组采集车辆的数量、位置和速度信息,并通过激光测距模组同步实现该数据的采集,并将两组设备进行校验比对,通过校验后的数据实时传输到所述步骤一中的数字孪生模型中;
6、步骤四、实时更新数字孪生模型中的路口交通情况,进行路口交通仿真和实时预测;
7、步骤五、基于仿真和预测结果,对信号灯的配时方案进行动态优化;
8、步骤六、控制移动框架改变数据采集位置,当改变位置使底部的车道数量产生变化后,借助底部支撑基座内部的螺纹柱和动力系统,控制立板和顶部的调节架升降,并通过控制调节架中的伸缩杆在伸缩套筒内部进行伸展或者收缩,来控制独立采集单元与变化后的车道进行对应,并手动改变数字孪生模型的基本参数,重复步骤四和步骤五。
9、进一步的,所述数字孪生模型通过步骤三中独立采集单元获取的车辆的数量、位置和速度信息,在模型中生成车辆的实时位置、速度和行驶路线信息。
10、进一步的,所述步骤一中,该数字孪生模型与参照的路口数据完全一致。
11、进一步的,所述路口道路网络以及路口限制信息、范围信息随着设定的移动框架的布设范围同步扩大。
12、进一步的,所述步骤五中,对信号灯的配时方案进行优化后,重置数字孪生模型中存储的车辆的实时位置、速度和行驶路线信息,后续输出结果与优化后的方案进行对应匹配。
13、进一步的,所述步骤三中视觉采集模组和激光测距模组采集的车辆数量、位置和速度信息比对结果产生数据误差后,同步将误差数据进行传输备份处理。
14、进一步的,所述数据误差传输到数字孪生模型内,并通过数字孪生模型根据误差数据模拟车辆行驶状态,所述车辆行驶状态包括变道、停车、车辆掉头。
15、进一步的,所述步骤二中借助两端的底部支撑基座移动至道路的外侧,通过底部的支撑滚轮进行位置调控,直至将顶部的每个独立采集单元与下方对应的车道完成对齐。
16、进一步的,通过底部支撑基座的下方动力箱中的电机驱动螺纹柱转动,螺纹柱插入到升降托板的内部借助转动效果驱动整个立板进行升降运动,并在后续对调节架以及独立采集单元的搭建和拆卸过程进行升降控制。
17、进一步的,所述步骤六中车道数量减少时,推动一端的底部支撑基座和立板,通过弹簧杆的支撑,避免第二伸缩杆移动,先带动第一伸缩杆插入到第一伸缩套筒的内部,随着持续推动,再带动第二伸缩杆嵌入到第二伸缩套筒的内部,并同步将弹簧进行压缩处理,直至调节架的长度与车道数量变化后的长度保持一致。
18、本发明的有益效果:
19、1.该基于数字孪生的路口实时仿真方法将先进的数字孪生技术与实时数据采集和智能信号配时相结合,实时数据采集能够收集车辆位置、速度等实时数据,利用实时数据在数字孪生模型中展示,更能反映真实的交通状况,并根据该数字孪生模型进行动态优化信号灯配时,从而实现了对路口交通的精准模拟和动态优化效果。
20、2.该基于数字孪生的路口实时仿真方法中使用数据采集设备对底部穿行的车辆速度、位置、数量等信息进行采集,且通过视觉采集模组配合激光测距模组完成采集过程,两种采集模组相互配合进行校验,提高了最终采集的车辆行驶信息的准确性。
21、3.该基于数字孪生的路口实时仿真方法中通过移动框架和顶部的调节架对多个独立采集单元进行安装,因此能够根据路口车道的具体数量对独立采集单元进行搭建,确保每个独立采集单元仅采集对应车道上的车辆行驶信息进一步提高了容错率,且配合移动框架和调节架能够实现灵活移动以及根据车道数量变化而进行相应调控的效果。
技术特征:1.一种基于数字孪生的路口实时仿真方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于数字孪生的路口实时仿真方法,其特征在于:所述数字孪生模型通过步骤三中独立采集单元获取的车辆的数量、位置和速度信息,在模型中生成车辆的实时位置、速度和行驶路线信息。
3.根据权利要求1所述的一种基于数字孪生的路口实时仿真方法,其特征在于:所述步骤一中,该数字孪生模型与参照的路口数据完全一致。
4.根据权利要求3所述的一种基于数字孪生的路口实时仿真方法,其特征在于:所述路口道路网络以及路口限制信息、范围信息随着设定的移动框架的布设范围同步扩大。
5.根据权利要求5所述的一种基于数字孪生的路口实时仿真方法,其特征在于:所述步骤五中,对信号灯的配时方案进行优化后,重置数字孪生模型中存储的车辆的实时位置、速度和行驶路线信息,后续输出结果与优化后的方案进行对应匹配。
6.根据权利要求2所述的一种基于数字孪生的路口实时仿真方法,其特征在于:所述步骤三中视觉采集模组和激光测距模组采集的车辆数量、位置和速度信息比对结果产生数据误差后,同步将误差数据进行传输备份处理。
7.根据权利要求6所述的一种基于数字孪生的路口实时仿真方法,其特征在于:所述数据误差传输到数字孪生模型内,并通过数字孪生模型根据误差数据模拟车辆行驶状态,车辆行驶状态包括变道、停车、车辆掉头等。
8.根据权利要求1所述的一种基于数字孪生的路口实时仿真方法,其特征在于:所述步骤二中借助两端的底部支撑基座移动至道路的外侧,通过底部的支撑滚轮进行位置调控,直至将顶部的每个独立采集单元与下方对应的车道完成对齐。
9.根据权利要求8所述的一种基于数字孪生的路口实时仿真方法,其特征在于:通过底部支撑基座的下方动力箱中的电机驱动螺纹柱转动,螺纹柱插入到升降托板的内部借助转动效果驱动整个立板进行升降运动,并在后续对调节架以及独立采集单元的搭建和拆卸过程进行升降控制。
10.根据权利要求9所述的一种基于数字孪生的路口实时仿真方法,其特征在于:所述步骤六中车道数量减少时,推动一端的底部支撑基座和立板,通过弹簧杆的支撑,避免第二伸缩杆移动,先带动第一伸缩杆插入到第一伸缩套筒的内部,随着持续推动,再带动第二伸缩杆嵌入到第二伸缩套筒的内部,并同步将弹簧进行压缩处理,直至调节架的长度与车道数量变化后的长度保持一致。
技术总结本发明提供一种基于数字孪生的路口实时仿真方法,包括以下步骤:创建数字孪生模型;在路口范围内搭建移动框架并搭建对应的独立采集单元;采集车辆的数量、位置和速度信息数据,并实时传输到数字孪生模型中;进行路口交通仿真和实时预测;基于仿真和预测结果,对信号灯的配时方案进行动态优化;控制移动框架改变数据采集位置重复步骤四和步骤五。该仿真方法利用实时数据在数字孪生模型中展示,利用实时数据在数字孪生模型中展示,更能反映真实交通状况,实现了对路口交通的精准模拟和动态优化效果,提高了最终采集的车辆行驶信息的准确性,且配合移动框架和调节架能够实现灵活移动以及根据车道数量变化而进行相应调控的效果。技术研发人员:苏少雄,杨紫胜,李学岭,李一立,王雪峰,陈昭良受保护的技术使用者:福建易华路信息技术有限公司技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240731/187134.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表