一种绿波车速引导方法及系统与流程
- 国知局
- 2024-07-31 20:42:38
本发明涉及智能网联汽车和车路协同,更具体地说,涉及一种绿波车速引导方法及系统。
背景技术:
1、在社会快速发展、人民生活日益提高的前提下,道路上的车辆也越来越多,也产生很多的交通事故。而目前自动驾驶也需要获取更多的信息使得车辆行驶在道路更加安全的,而v2x就提供这些功能,让车辆获取更多的信息,从而使得道路上的汽车更加的安全,智能。cv2x是一种先进无线通讯技术,它能让车辆、信号灯、交通标识、骑行者和行人的通讯设备实现互联,并共享当前状态,位置及行动意图等信息。v2x主要是研究车与车,车与路,车与人........车与万物的关系。相关的场景应用有:前向碰撞预警,变道预警,限速预警,行人预警,绿波车速引导,感知数据共享等应用场景。
2、其中绿波车速引导(glosa:green light optimal speed advisory)是指,当装载车载单元(obu)的hv驶向信号灯控制交叉路口,收到由路侧单元(rsu)发送的道路数据及信号灯实时状态数据时,应用将给予驾驶员一个建议车速区间,以使车辆能够经济地、舒适地(不需要停车等待)通过信号路口。
3、现有技术有以下几个缺点:
4、1、在绿波车速引导场景中,场景实现流程,和决策判断算法描述模糊,无法进行相关实现,车辆之间无法实现安全高效的自行合作变道;
5、2、没有考虑弯道的情况,弯道会导致距离计算不准,导致车速引导不对的情况;
6、3、没有考虑前方有车影响的情况,会导致车速引导不对的情况。
技术实现思路
1、本发明为解决现有技术处理的缺陷和不足,提供一种绿波车速引导方法及系统。
2、为实现上述目的,本发明采取的技术方案是一种绿波车速引导方法,所述方法包括以下步骤:
3、s1:车辆获取交通灯信息以及地图信息,并定位车辆所在位置;
4、s2:计算车辆与当前道路停止点的距离;
5、s3:根据车辆到当前道路停止点的距离以及交通灯信息,计算出对应的建议行驶速度并显示给驾驶员。
6、优选的,所述s1包括以下步骤:
7、s11:路侧单元周期性发送当前道路的交通灯信息以及地图数据至车辆;
8、s12:车辆根据本车的经纬度、当前道路的交通灯信息以及地图数据得到车辆行驶的对应路口id、车辆当前道路的交通灯id、当前道路的转向关系以及当前道路停止点的位置。
9、优选的,所述s2中“计算车辆与当前道路停止点的距离”包括以下步骤:
10、s21:判断当前道路为弯道或是直道,若是直道,则执行s22、s23,若是弯道,则执行s24;
11、s22:计算车辆与当前道路停止点的经度差与纬度差,设车辆的当前经纬度位置为(lnga,lata),当前道路停止点的经纬度位置为(lngb,latb),则车辆与当前道路停止点的纬度差为:deltalat=|lata–latb|,
12、车辆与当前道路停止点的经度差为:deltalng=|lnga–lngb|;
13、s23:根据车辆与当前道路停止点的经度差与纬度差计算车辆与当前道路停止点的距离,车辆与当前道路停止点的距离公式为
14、
15、r表示地球的半径6378137m;
16、s24:将当前车辆位置定位、停止点信息输入到导航地图以得到车辆与当前道路停止点的距离。
17、优选的,所述s3包括以下步骤:
18、s31:根据车辆当前道路的交通灯id获取交通灯的实时状态,所述实时状态包括灯色信息以及倒计时信息;
19、s32:根据车辆位置、交通灯的实时状态计算出对应的建议行驶速度。
20、优选的,所述s32计算出对应的建议行驶速度的方法为:若当前交通灯为红灯,则计算车辆在此次红灯期间不越过停止点且在不停车的状态下通过该路口所需的最高行驶速度v1,以及下次绿灯期间在不停车的状态下通过路口所需的建议最低行驶速度v2,其中,v1=车辆与当前道路停止点的距离除以红灯倒计时时间,v2=车辆与当前道路停止点的距离除以(红灯倒计时时间+绿灯倒计时时间);
21、若当前交通灯为绿灯,则计算车辆能够在本次绿灯期间不停车通过路口所需的建议最低行驶速度v3,v3=车辆与当前道路停止点的距离除以绿灯倒计时时间);
22、若当前交通灯为黄灯,则计算车辆在本次黄灯和红灯期间不越过停止点且在不停车的状态下通过路口所需的最高行驶速度v4,以及下次绿灯期间在不停车的状态下通过路口所需的建议最低行驶速度v5,其中,v4=车辆与当前道路停止点的距离除以(本次黄灯倒计时时间+红灯倒计时时间),v5=车辆与当前道路停止点的距离除以绿灯倒计时时间。
23、优选的,还包括s4:当车辆与当前道路停止点之间的区间有其他车辆时,则不提供建议行驶速度。
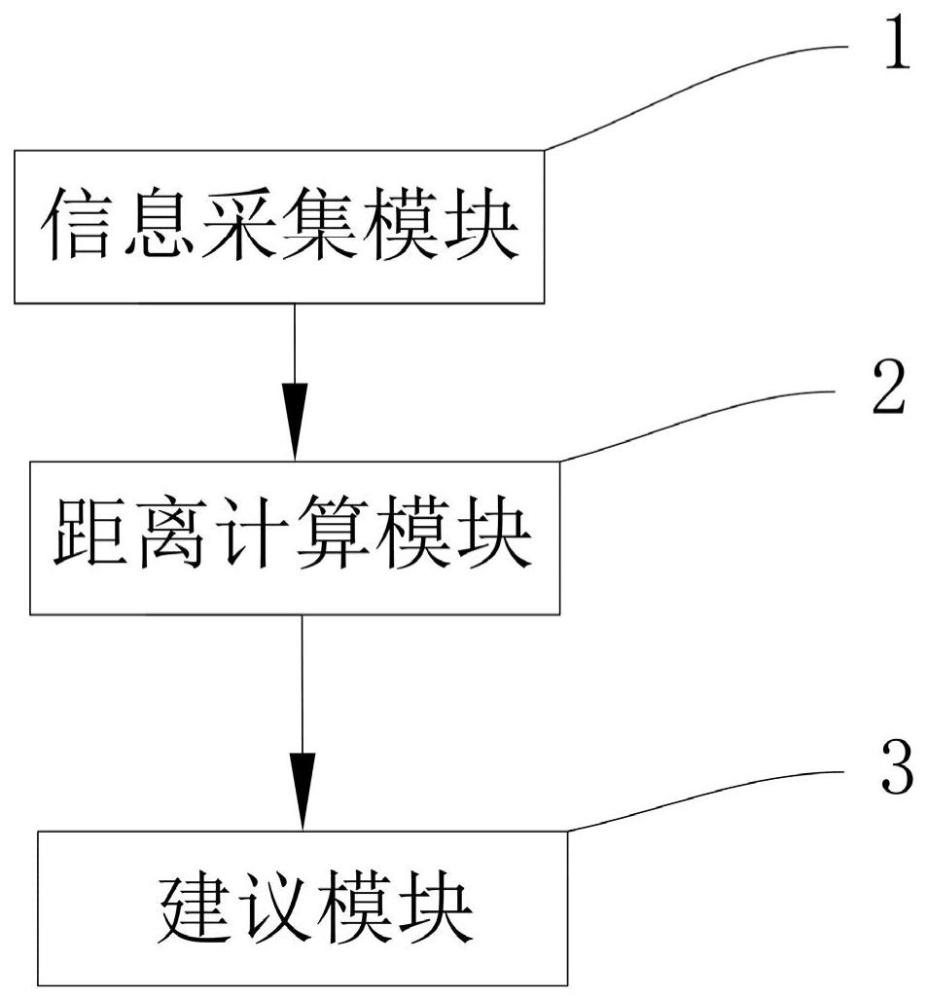
24、本发明还包括一种绿波车速引导系统,用于实现以上所述的绿波车速引导方法,包括信息采集模块、距离计算模块、建议模块,
25、所述信息采集模块用于获取交通灯信息、地图信息、车辆所在位置信息;
26、所述距离计算模块用于计算车辆与当前道路停止点的距离;
27、所述建议模块用于根据车辆到当前道路停止点的距离以及交通灯信息,计算出对应的建议行驶速度并显示给驾驶员。
28、优选的,所述信息采集模块包括接收单元、匹配单元,
29、所述接收单元用于接收路侧单元周期性发送当前道路的交通灯信息以及地图数据;
30、所述匹配单元用于根据本车的经纬度、当前道路的交通灯信息以及地图数据得到车辆行驶的对应路口id、车辆当前道路的交通灯id、当前道路的转向关系以及当前道路停止点的位置。
31、优选的,所述距离计算模块包括判断单元、直道距离计算单元、弯道距离计算单元,
32、所述判断单元用于判断当前道路为弯道或是直道;
33、所述直道距离计算单元用于计算车辆与当前道路停止点的经度差与纬度差,设车辆的当前经纬度位置为(lnga,lata),当前道路停止点的经纬度位置为(lngb,latb),则
34、车辆与当前道路停止点的纬度差为:deltalat=|lata–latb|,
35、车辆与当前道路停止点的经度差为:deltalng=|lnga–lngb|,
36、并用于根据车辆与当前道路停止点的经度差与纬度差计算车辆与当前道路停止点的距离,车辆与当前道路停止点的距离公式为
37、
38、r表示地球的半径6378137m;
39、所述弯道距离计算单元用于将当前车辆位置定位、停止点信息输入到导航地图以得到车辆与当前道路停止点的距离。
40、优选的,所述建议模块包括信息获取单元、速度计算单元,
41、所述信息获取单元用于根据车辆当前道路的交通灯id获取交通灯的实时状态,所述实时状态包括灯色信息以及倒计时信息;
42、所述速度计算单元用于根据车辆位置、交通灯的实时状态计算出对应的建议行驶速度,若当前交通灯为红灯,则计算车辆在此次红灯期间不越过停止点且在不停车的状态下通过该路口所需的最高行驶速度v1,以及下次绿灯期间在不停车的状态下通过路口所需的建议最低行驶速度v2,其中,v1=车辆与当前道路停止点的距离除以红灯倒计时时间,v2=车辆与当前道路停止点的距离除以(红灯倒计时时间+绿灯倒计时时间);
43、若当前交通灯为绿灯,则计算车辆能够在本次绿灯期间不停车通过路口所需的建议最低行驶速度v3,v3=车辆与当前道路停止点的距离除以绿灯倒计时时间);
44、若当前交通灯为黄灯,则计算车辆在本次黄灯和红灯期间不越过停止点且在不停车的状态下通过路口所需的最高行驶速度v4,以及下次绿灯期间在不停车的状态下通过路口所需的建议最低行驶速度v5,其中,v4=车辆与当前道路停止点的距离除以(本次黄灯倒计时时间+红灯倒计时时间),v5=车辆与当前道路停止点的距离除以绿灯倒计时时间。
45、本发明的有益效果:
46、本发明提供了一种绿波车速引导方法及系统,实现绿波车速引导,可以提升通行效率和道路安全,增加地图融合的方案,使得车速引导更为准确,考虑前方有车的情况,减少驾驶员的困惑。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187523.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表