一种基于无人机的目标监测预警方法及系统与流程
- 国知局
- 2024-07-31 21:09:27
本发明涉及道路监测预警,特别是一种基于无人机的目标监测预警方法及系统。
背景技术:
1、传统的交通监测和管理系统主要依赖于固定的监测设备,如闭路电视、摄像机、地磁传感器、雷达和光线传感器等。这些设备安装在特定的地点,用于收集交通流量、车辆速度、事故信息等数据。虽然这些系统在过去几十年中已经取得了显著的发展,但它们在实时数据处理、监测范围、成本效益、以及数据安全性方面仍面临一系列挑战。
2、监测范围和适应性有限:固定监测设备只能在特定位置提供数据,限制了监测范围和对整个交通流的全面理解。
3、数据更新延迟:数据处理和传输的时间延迟意味着提供的信息可能不是实时的,这限制了其在紧急情况下的应用效果,如交通拥堵和事故快速响应。
4、高维护成本:固定监测设施的安装和持续维护需要显著的资金投入,这对于资源有限的区域来说是一个问题。
技术实现思路
1、鉴于现有的基于无人机的目标监测预警方法及系统中存在的问题,提出了本发明。
2、因此,本发明所要解决的问题在于监测范围和适应性有限、数据更新延迟和高维护成本。
3、为解决上述技术问题,本发明提供如下技术方案:
4、第一方面,本发明实施例提供了一种基于无人机的目标监测预警方法,其包括以下步骤,
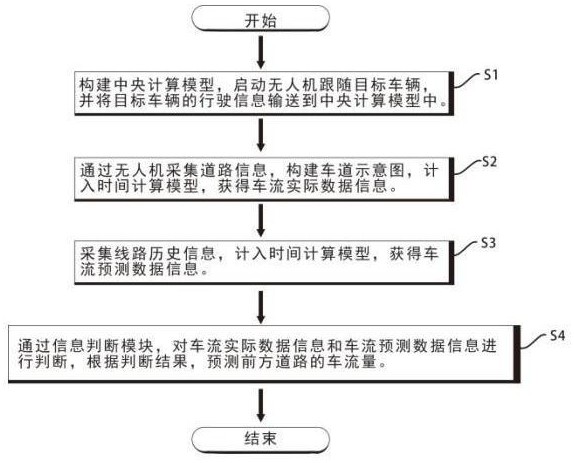
5、构建中央计算模型,启动无人机跟随目标车辆,并将目标车辆的行驶信息输送到中央计算模型中;
6、通过无人机采集道路信息,构建车道示意图,计入时间设定模型,获得车流实际数据信息;
7、采集线路历史信息,计入时间设定模型,获得车流预测数据信息;
8、通过信息判断模块,对车流实际数据信息和车流预测数据信息进行判断,根据判断结果,预测前方道路的车流量。
9、作为本发明所述基于无人机的目标监测预警方法的一种优选方案,其中:所述目标车辆的行驶信息包括行车速度与车辆位置;
10、所述中央计算模型计算行车速度和车辆位置的方法包括:引入地图雷达系统,根据车辆位置,识别道路两侧人员房屋信息,并通过对房屋信息计算,获取行人横穿马路的概率,再根据车辆位置,识别该道路类型,根据道路类型,获得法定车辆限定速度;
11、所述中央计算模型计算行车方向的方法包括:设定时间间隔l,在两个时间段之间重复获取同一个目标车辆位置,并根据时间差和车辆位置,获得行车方向。
12、作为本发明所述基于无人机的目标监测预警方法的一种优选方案,其中:所述目标车辆行驶时,根据法定车辆限定速度判断车辆的最高行驶速度,并对房屋信息判断,获得最佳行驶速度;
13、当根据房屋信息判断的人横穿马路的概率大于阈值g时,最佳行驶速度为法定车辆限定速度的65%-75%,当根据房屋信息判断的人横穿马路的概率小于阈值g且大于阈值d时,最佳行驶速度为法定车辆限定速度的75%-90%,根据房屋信息判断的人横穿马路的概率小于阈值d时,最佳行驶速度为法定车辆限定速度的100%;
14、所述房屋信息包括城镇道路房屋、农村道路房屋和公路房屋。
15、作为本发明所述基于无人机的目标监测预警方法的一种优选方案,其中:所述道路信息包括车道的数量、车道的宽度,以及车道的交通流量;
16、所述车流实际数据信息的获得方法包括,
17、通过所述时间设定模型设定时间区间,将设定的时间区间分为多段,采集目标车辆在每段时间区间内的行驶距离,获得实际数据信息,最后将获取的多组实际数据信息按照时间顺序排列;
18、获得实际数据信息之后,将第一段时间区间对应的实际数据信息,记录应用密码学哈希函数,生成对应的哈希值,并将哈希值与时间戳结合,之后再对第二段时间区间记录,利用链式数据结构,第二条实际数据信息记录的哈希值包含第一条记录的哈希值,将哈希值和时间戳存储在一个分布式账本;
19、其中,分布式账本为区块链。
20、作为本发明所述基于无人机的目标监测预警方法的一种优选方案,其中:预测数据信息的获取方法包括,
21、对所述线路历史信息通过滤波算法去除随机噪声,再将数据转换到统一的格式,再获得实际数据信息对应的时间区间,选择相同的时间区间的线路历史信息,最后计算出预测数据信息;
22、获得预测数据信息之后,将第一段时间区间对应的预测数据信息,记录应用密码学哈希函数,生成对应的哈希值,并将哈希值与时间戳结合,之后再对第二段时间区间记录,利用链式数据结构,第二条实际数据信息记录的哈希值包含第一条记录的哈希值,将哈希值和时间戳存储在一个分布式账本;
23、其中,分布式账本为区块链。
24、作为本发明所述基于无人机的目标监测预警方法的一种优选方案,其中:信息判断模块的判断方式包括,计算车流实际数据信息和车流预测数据信息的差值是否小于阈值s,当差值小于阈值s时,将车流预测数据信息替代车流实际数据信息显示前方道路的信息状态,当差值不小于阈值s时,进行二次判断;
25、所述二次判断的方法包括:
26、判断前方是否出现特殊情况,当出现特殊情况时,不对车流实际数据信息做出改变,当前方没有出现特殊情况时,对车流预测数据信息更新,更新公式具体表示为:
27、;
28、式中,表示为更新后的车流预测数据信息,表示为更新前的车流预测数据信息,表示为车流实际数据信息,表示为当前时间区间车流数据信息;
29、将更新后的车流预测数据信息替代车流实际数据信息显示前方道路的信息状态。
30、作为本发明所述基于无人机的目标监测预警方法的一种优选方案,其中:提取所述车流实际数据信息时,通过智能合约自动执行数据的完整性验证,当请求验证数据时,智能合约检查数据的当前哈希值和区域链上存储的哈希值是否一致,当一致时,直接输出所述车流实际数据信息,当不一致时,设置异常处理协议,通知相关的维护人员;异常处理协议为保密协议,临时存储异常的车流实际数据信息。
31、第二方面,本发明实施例提供了一种基于无人机的目标监测预警系统,其包括:数据计算模块、采集单元、信息判断模块,以及数值提取模块;
32、所述数据计算模块接收并处理无人机收集的数据,计算出最佳的行驶速度,预测车流量;
33、所述采集单元用于实时追踪目标车辆并收集所需的道路信息;
34、所述信息判断模块负责将车流实际数据信息与车流预测数据信息进行比较,判断两者的差值是否在可接受的范围内,依据此判断,选择是否使用车流预测数据信息来展示前方道路的信息状态,其中,可接受的范围区间为;
35、所述数值提取模块用于对车流实际数据信息提取,并对车流实际数据信息的完整性进行检验,保证信息的存储。
36、第三方面,本发明实施例提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其中:所述处理器执行所述计算机程序时实现上述的基于无人机的目标监测预警方法的任一步骤。
37、第四方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,其中:所述计算机程序被处理器执行时实现上述的基于无人机的目标监测预警方法的任一步骤。
38、本发明有益效果为:通过无人机实时追踪目标车辆的行驶信息,能够更加精准的识别实时数据,同时也能够对道路信息更加全面的检测,对整个交通信息的数据采集更加清晰,方便之后的计算,并且实时追踪车辆,可以实时传输数据,固定式拍摄,无法实施目标车辆的形式信息传输,并且并不需要对设备安装等作业,方便操作人员的使用,同时中央计算模型的使用,能够保证车辆行驶的安全和顺畅。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188611.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表