一种基于城市交通仿真的车辆换道控制方法及装置
- 国知局
- 2024-07-31 21:09:19
本发明涉及城市交通仿真领域,尤其涉及一种基于城市交通仿真的车辆换道控制方法及装置。
背景技术:
1、城市交通仿真是通过模拟城市道路交通系统的运行情况,以分析交通流、优化交通规划和改善交通效率的一种技术手段。车辆换道模型是城市交通仿真中的关键组成部分,其主要功能是模拟车辆在道路上进行换道的决策过程,以提高交通系统的整体效能。
2、车辆换道模型的重要性体现在以下几个方面:良好的换道模型能够使车辆在道路上更加灵活地调整行驶路径,有效缓解拥堵情况,提升交通流畅性;通过合理的换道决策,车辆可以更有效地利用道路空间,减少道路资源浪费,提高道路利用率;换道模型的良好设计可以避免交通事故,确保车辆在进行换道操作时考虑到前后车辆的行驶状况,提高交通系统的整体安全性。然而,以往的换道模型也存在一些缺点:
3、1.仅考虑左右车道的拥挤程度:这种模型在较宽道路上表现不佳,无法充分考虑车辆与目标道路的匹配度。
4、2.对前方车辆速度和距离的简单判断:以前的模型仅通过前方车辆的速度和距离来进行换道决策,无法提前感知前方车辆的减速或停止情况。
5、3.未考虑后续行驶道路:以前的模型未能提前考虑车辆即将进入的行驶道路,导致换道决策缺乏长远规划。
6、4.忽略前方车辆数量的影响:在等待红绿灯时,以前的模型未考虑前方车辆数量,可能导致车道无法充分利用。
7、5.缺乏与当前车况和路况的评估:以前的模型未对当前车辆状况和道路状况进行全面评估,可能导致选择并非最优的换道策略。
8、为了克服这些缺点,需要进一步优化和改进换道模型,引入更多的因素和先进的算法,以实现更智能、更适应复杂交通环境的车辆换道决策。
技术实现思路
1、本发明目的在于针对现有技术的不足,提出一种基于城市交通仿真的车辆换道控制方法及装置。
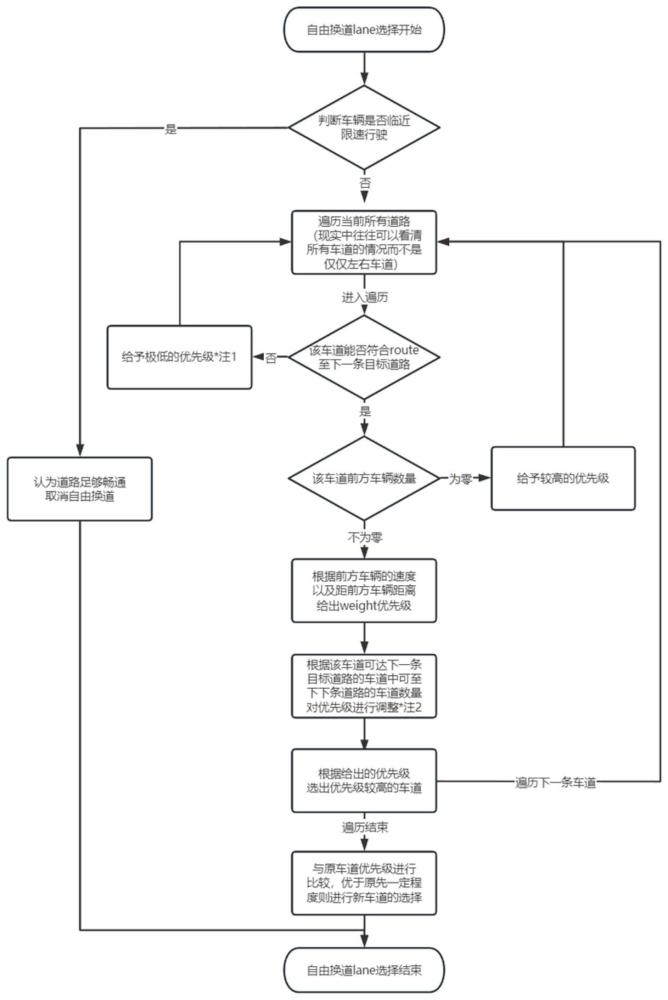
2、本发明的目的是通过以下技术方案来实现的:一种基于城市交通仿真的车辆换道控制方法,该方法包括以下步骤:
3、(1)根据实际道路构建路网二维地图,并生成车辆行驶路线,进行微观交通仿真,获取仿真中车辆状态和路段信息;
4、(2)判断当前第i条路段的所有车道中是否有符合该车辆行驶路线可达第i+1条路段的车道;
5、(3)根据可达第i+1条路段中的车道判断可至第i+2条路段的车辆数量,判断影响车辆行驶路线的拥堵程度t;
6、(4)根据车辆行驶路线计算当前第i条车道至第i+1条路段的数量所占当前第i条车道全部下游路段的比例k;
7、(5)根据非当前车道中车辆位置后方车辆状态,判断当前车辆换道是否会影响到后车行驶,赋予拥堵影响系数b;
8、(6)遍历当前路段中的车道,给予每一条路段一个拥堵指数weight,计算公式为:
9、
10、其中vehnum为前方车辆数量,frontv为前方车辆速度,limitv为当前车道限速,fronts为前方车辆位置,curs为当前车辆位置,nextnum为可达第i+2条在车辆行驶路线上的路段中的车道数量,a、b、c均为参数;
11、将所有车道按照拥堵指数排序,其中拥堵指数最小的车道为最优的换道车道。
12、进一步地,步骤(1)中,采用车道lane、路段edge、道路road的三层路网结构来模拟真实的道路,junction来模拟真实的交叉口;
13、路段edge分为两种:internal edge和normal edge,normal edge为交叉口之间的路段,包含多个车道lane,internal edge为交叉口内部的行车路线,有且只有一个车道;
14、车道lane是比路段更小的单位,一条车道不能横跨两个路段,只能并列排列在路段内部。
15、进一步地,步骤(2)中,通过当前第i条路段可达的下游第i+1条路段反向获取到当前第i条路段中每条车道分别通行至下游的哪一条路段;判断当前车辆所在路段在该车辆行驶路线中是否为终点路段,若是终点则将目标车道设为路段中最右车道,若不是终点,则判断当前车辆的行驶路线中第i+1条路段与该车所在路段可达的下游路段中哪一个路段相同,并将该路段对应的车道标记为可至第i+1条路段的车道。
16、进一步地,步骤(3)中,若在车辆的行驶路线route中,第i+2条路段为目的地,则跳过此步骤;否则,根据车辆行驶路线寻找第i+1条路段中的车道可达第i+2条在行驶路线上的路段的数量,记为nextnum,将行驶路线影响系数记为t:
17、
18、t的含义为:当前该车道是否可达行驶路线中第i+1条的路段nextnormaledge,且在第i+1条路段的下游车道中是否可达第i+2条行驶路线上路段,若都满足,则记为1,若不满足第一点,记为t1,若不满足第二点,记为t2,若都不满足,记为t3,此时t1,t2,t3应小于1且递减。
19、进一步地,步骤(5)中,若存在后方车辆,则获取该车辆的位置信息记为backs,速度信息记为backv,当前车辆位置信息记为curs,当前车辆速度信息记为curv,记为最大换道时间记为maxa;计算后方来车的影响系数b,即当前车辆换道会影响到后车行驶的系数为:
20、
21、当大于等于maxa时,在当前最大的换道时间内后车会影响换道,则认为后方车辆过快,赋予更高的拥堵指数,考虑在该后车通行过后换道。
22、进一步地,根据拥堵指数获得车道排序后,还需要判断候选车道,将除当前车道外的所有排序后车道依次与当前车道进行拥堵指数比较,直到某一项数值大于等于当前车道拥堵指数的p%时停止,将小于当前车道拥堵指数的p%的车道列入候选车道中,其中p的数值设定为:
23、
24、其中,curv表示当前车辆速度,limitv表示根据路段限速以及当前车辆类型限速得出该车最大速度;此时p的含义为当前车辆速度越不达限速,则越不希望进行换道。
25、进一步地,对选定的每一条车道进行安全检查判断,即在当前的速度下换道后判断目标车道上是否有车辆冲突的行为,记换道所需要的距离为t*v,冲突判断距离t*(v+-v),t为设定的换道时间,v为当前车辆速度,v为设定的速度偏移值;
26、a.目标车道上对应位置加冲突判断距离的范围内是否被车辆占满;
27、b.目标车道上对应位置加冲突判断距离的范围内是否有后车冲入,后车判断所在位置计算为后车当前位置+t*后车当前速度;
28、当无冲突时,将当前车道作为换道目标进行输出;当有冲突时,判定为该车道不安全,继续下一条车道的判断,当所有候选车道都不安全时,输出为空,表示当前情况不满足换道条件。
29、第二方面,本发明还提供了一种基于城市交通仿真的车辆换道控制装置,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,所述处理器执行所述可执行代码时,实现所述的一种基于城市交通仿真的车辆换道控制方法。
30、第三方面,本发明还提供了一种计算机可读存储介质,其上存储有程序,所述程序被处理器执行时,实现所述的一种基于城市交通仿真的车辆换道控制方法。
31、第四方面,本发明还提供了一种计算机程序产品,包括计算机程序/指令,所述计算机程序/指令被处理器执行时,实现所述的一种基于城市交通仿真的车辆换道控制方法。
32、本发明的有益效果:
33、1.考虑车辆与目标路段的匹配度:新模型引入了更多的因素,如车辆类型、目标路段特性等,使得在较宽路段上也能够更好地考虑车辆与目标路段的匹配度。
34、2.提前感知前方车辆减速或停止:新模型能够提前感知前方车辆的减速或停止情况,避免仅仅依赖速度和距离的简单判断。这样的改进使得换道决策更加智能和安全,降低了交通事故的风险。
35、3.长远规划换道决策:新模型考虑了车辆即将进入的行驶路段,实现了更长远的换道规划。这有助于避免短视的决策,提高了整体交通系统的效率和流畅性。
36、4.充分利用车道空间:引入对前方车辆数量的考虑,新模型确保在等待红绿灯时充分利用车道空间,减少车道被填不满的情况,提高了道路资源的利用率,降低了拥堵的可能性。
37、5.全面评估当前车况和路况:新模型对当前车辆状况和道路状况进行全面评估,确保选择最优的换道策略。这有助于提高整体交通系统的效能,减少不必要的交通阻塞和延误。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188597.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。