一种面向复杂道路场景的协同感知可靠性评估方法
- 国知局
- 2024-07-31 21:09:23
本技术涉及协同感知,具体涉及一种面向复杂道路场景的协同感知可靠性评估方法。
背景技术:
1、协同感知可以极大地拓展单车的感知范围、提升感知的能力,引入高维数据为代表的新的智能要素,实现群体智能,从而保证自动驾驶安全,扩展自动驾驶运行设计域。评估协同感知算法的可靠性,不仅对降低测试成本至关重要,而且可以指明感知算法的优化方向。
2、现有协同感知算法多以单一影响因素如车辆行驶速度、智能网联车辆渗透率和交通量等因素下对协同感知结果的影响,缺少综合考虑车辆自身状态与外部交通环境状态的智能网联汽车协同感知可靠性评估。而且现有协同感知算法面临长尾效应,面对光照条件差、其他交通参与者遮挡、交通流密集等复杂的道路场景,协同感知算法的表现可能会显著下降。找出那些对协同感知算法最具挑战性的场景参数,可以对算法进行更全面的评估,指明感知算法的优化方向。
技术实现思路
1、针对上述问题,本发明提出一种面向复杂道路场景的协同感知可靠性评估方法,通过获取场景道路拓扑信息及主车点云数据;将主车点云数据和道路拓扑信息输入协同感知模型,得到多车感知图像与雷达点云数据,根据雷达点云数据综合特征信息得到边框图像;根据边框图像,基于马尔可夫决策过程,以策略迭代获得马尔可夫过程的平稳分布,以阈值筛选出使协同感知模型表现下降的极端条件;将筛选出的极端条件下协同感知模型输出的多车感知图像与雷达点云数据进行特征提取,特征数据输入贝叶斯神经网络(bnn)得到模型的不确定性,基于不确定性对可靠性建模,以评估协同感知模型的可靠性。
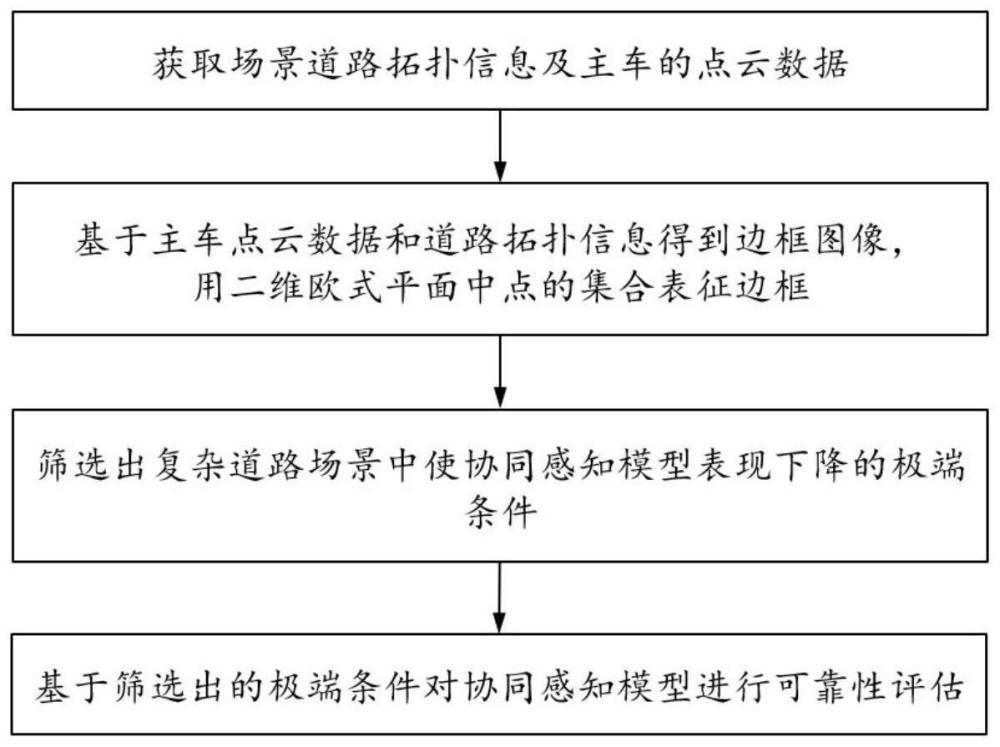
2、本发明的一种面向复杂道路场景的协同感知可靠性评估方法,具体包括如下步骤:
3、s1:获取场景道路拓扑信息及主车的云数据并进行数据预处理;
4、s2:基于主车点云数据和道路拓扑信息得到边框图像,用二维欧式平面中点的集合表征边框图像;
5、s3:筛选出复杂道路场景中使协同感知模型表现下降的极端条件;
6、s4:基于筛选出的极端条件对协同感知模型进行可靠性评估。
7、进一步地,所述步骤s1中,所述主车为该场景中选定的任一车辆。
8、具体包括:
9、s11获取场景的地图信息,由地图信息生成道路拓扑信息;
10、s12从主车的车载传感器中获得主车点云数据,进行预处理以输入协同感知模型,其中:所述预处理包括对原始点云数据进行数据清洗、填补缺省值、清除异常值和冗余值,所述协同感知模型是指通过整合来自多个传感器、基础设施和其他车辆的信息对道路条件和交通环境进行感知和预测的模型。
11、进一步地,所述步骤s2具体包括:
12、s21将主车点云数据和道路拓扑信息输入协同感知模型进行感知融合,得到多车感知图像与雷达点云数据;
13、s22根据主车点云数据和s21中得到的多车感知图像和雷达点云数据,综合特征信息得到边框图像;
14、s23将场景和边框图像映射到二维欧氏平面中,用平面中点的集合表征边框图像;
15、其中所述映射为仿射变换,保持边框的边上的点共线。
16、进一步地,所述步骤s3,通过马尔可夫决策过程,将预测边框与真实边框重叠率定义为协同感知模型的精度,用两个状态的模型精度差值作为奖励函数,筛选出极端条件,即场景参数;
17、其中所述协同感知模型表现下降的度量指标为协同感知模型在当前场景条件下的精度z,该精度定义为预测边框与真实边框重叠率:
18、
19、其中reali表示场景中第i个物体的外切矩形,prei表示协同感知模型输出第i个物体的点云数据得到的边框;
20、如果prei中任一点的坐标的每个分量不落在reali的每个维度的范围内,则
21、
22、所述步骤s3,具体包括:
23、s31基于马尔可夫决策过程,以策略迭代获得马尔可夫过程的平稳分布;
24、其中所述马尔可夫过程以场景下的条件作为状态集s,智能体选择每个状态的概率为当前状态下每个动作的状态转移概率t,智能体选择下一时刻要改变的条件为动作集a,智能体从环境中获得的奖励函数为r;
25、初始时刻,智能体遍历状态集,计算每个状态下的奖励函数r(s,a,s’),其中s,s′∈s,a∈a,初始奖励函数值的平均值表征正常条件下协同感知模型表现,将奖励函数值序列标准化后除以card(s)得到初始概率分布,其中card(s)表示集合s的元素个数;
26、其中所述奖励函数的计算方法为:
27、r(s,a,s′)=z(s)-z(s′)
28、其中z(s)为状态s下的协同感知模型精度,z(s′)为状态s’下的协同感知模型精度;
29、初始时刻奖励函数为:
30、r(a,s)=z(s);
31、第i+1步,根据第i步的状态转移概率t(s,a,s’)遍历状态集,计算每个状态下的奖励函数r(s,a,s’),计算每个状态下的价值函数vi+1(s):
32、
33、其中γ为反馈的折扣率,将价值函数值序列标准化后除以card(s)得到状态转移概率ti+1(s,a,s’);
34、判断当前价值函数是否收敛,即存在n>0,使得当n>n时,有
35、vn+1-vn<∈
36、此时称价值函数收敛。若不收敛,根据状态转移计算下一时刻的奖励函数和价值函数。经过有限步迭代之后,价值函数收敛,同时状态转移概率收敛到一个card(s)维向量π=(p1,p2,…,pn),即为该马尔可夫过程的平稳分布;
37、s32将平稳分布向量各分量按数值大小升序排列为π′=(p(1),p(2),…p(n)),以p(i)的第三个四分位数q3作为阈值,筛选出大于该阈值的分量ss={pi∈π∣pi>q3},这些分量下标对应状态集中的状态即为极端条件。
38、进一步地,所述步骤s4,具体包括:
39、s41将极端条件下协同感知模型输出的多车感知图像与雷达点云数据进行特征提取,得到的时空数据定义为df=(si,ti),其中si表示空间特征,ti表示时间特征;
40、s42将步骤s41得到的时空数据输入贝叶斯神经网络(bnn)得到模型的不确定性参数;
41、具体为:定义训练集d=(xi,yi)和协同感知算法的权重wi服从正态分布,其中xi为输入数据,yi为预测数据,用描述协同感知模型在数据xi上的不确定性,其中y为真实数据,使用基于bnn的算法以得到
42、在给定数据集的情况下,算法的后验分布为
43、
44、其中w为感知的权重;
45、算法的损失函数为
46、
47、通过变分推理近似所求的后验分布,求解
48、
49、得到模型的不确定性参数。
50、s43基于不确定性对可靠性建模,以评估协同感知模型的可靠性;
51、其中可靠性建模方法包括:
52、通过kl散度量化故障事件与正常状态的不同程度:
53、
54、其中是处理后的极端条件下协同感知信息,从仿真场景下直接获得;
55、计算时间层面上预测失败的概率
56、
57、其中为在时间层面上基于ti在时空数据集df上的感知信息,为在时间层面上从仿真场景下获得基于ti的信息;
58、计算空间层面上预测失败的概率
59、
60、其中为在空间层面上基于si在时空数据集df上的感知信息,为在空间层面上的从仿真场景下获得基于si的信息;
61、考虑步骤s42中的不确定性参数,协同感知模型的可靠性可表征为
62、
63、其中为步骤s42得到的不确定性参数。
64、本发明具有如下优势:
65、(1)本发明一种面向复杂道路场景的协同感知可靠性评估方法,通过比较感知失效影响的车辆的实际行为,直观地展示了可靠性随数据和时间变化的波动。
66、(2)本发明通过马尔可夫决策过程,将边框图像通过仿射变换映射到二维欧氏平面上,将预测边框与真实边框重叠率定义为协同感知模型的精度,用两个状态的模型精度差值作为奖励函数,筛选出极端条件。
67、(3)本发明筛选出那些对协同感知算法最具挑战性的条件或场景,可以对算法进行更全面的评估,指明协同感知算法的优化方向。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188602.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。