基于车路协同的公路在途车辆运行风险预警方法及系统与流程
- 国知局
- 2024-07-31 21:09:25
本发明涉及交通环境风险领域,具体涉及一种基于车路协同的公路在途车辆运行风险预警方法及系统。
背景技术:
1、公路交通中,交通事故、车辆损坏、人员伤亡以及交通拥堵等时常发生,严重威胁了公路交通安全和通畅,因此,进行及时的在途车辆运行风险预警至关重要。
2、目前,对于在途车辆运行风险预警主要是通过车辆监控平台对智能车载监控终端设定固定预警方案进行提示,当车辆即将进入干线公路隧道、急弯、连续长陡下坡、事故频发路段时,智能车载终端语音提醒司机已即将进入高风险路段,并上报交通环境风险信息到车辆监控平台,车辆监控平台实时更新道路环境风险路段信息,定期更新。此方案虽然实现简便,但该方案需要将精确的路段状态信息数据,实时更新存储在智能车载终端上,对实时更新信息数据具有较高的要求。
3、因此,为解决以上问题,需要一种基于车路协同的公路在途车辆运行风险预警方法及系统,能够避免路段状态信息数据需要实时更新,实现了任何路段、任何时间的车辆运行风险预警。
技术实现思路
1、有鉴于此,本发明的目的是克服现有技术中的缺陷,提供基于车路协同的公路在途车辆运行风险预警方法及系统,能够避免路段状态信息数据需要实时更新,实现了任何路段、任何时间的车辆运行风险预警。
2、本发明的基于车路协同的公路在途车辆运行风险预警方法,包括如下步骤:
3、实时识别车辆所处的路段;
4、判断车辆的行驶速度是否小于所处路段的限速值,若是,则不进行预警;若否,则选择设定的预警方式对车辆进行预警提醒。
5、进一步,实时识别车辆所处的路段,具体包括:
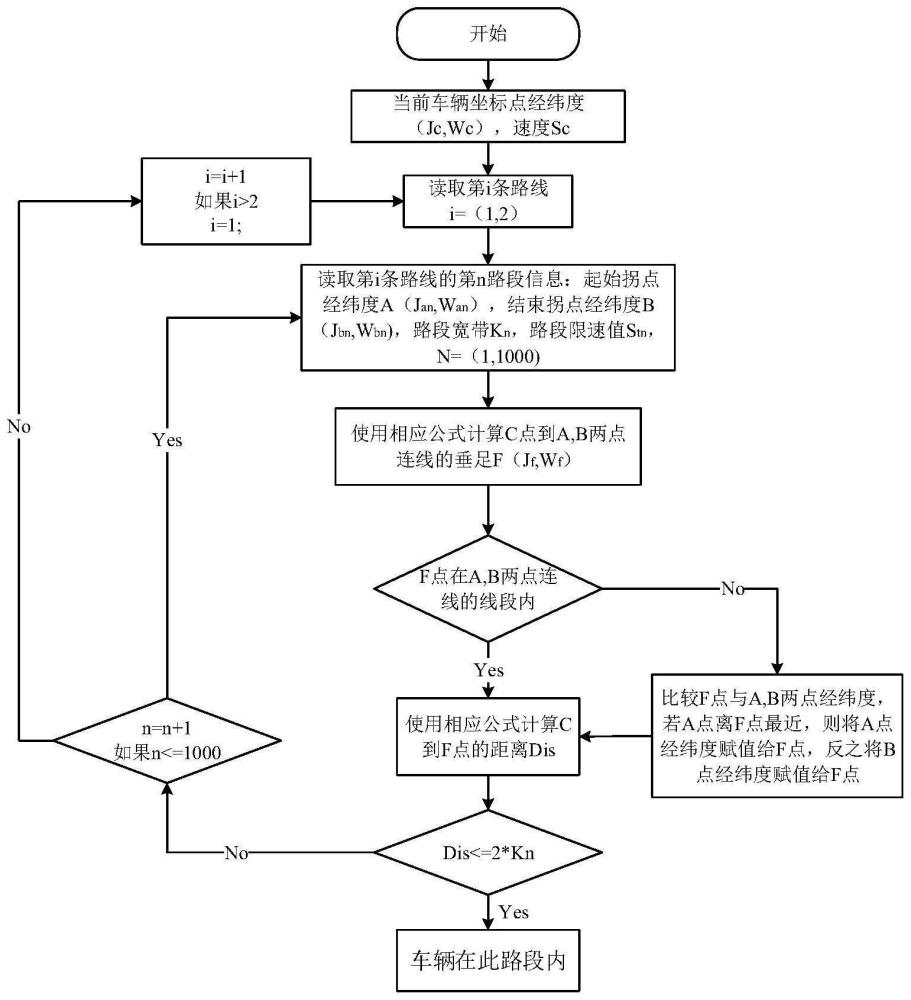
6、s11.将车辆的实时经度记为jc,实时纬度记为wc,实时速度记为sc,车辆位置标记为坐标点c(jc,wc);坐标c以及速度sc每1秒钟更新一次;
7、s12.从预先存储的数据中读取某条路线中路段n的起始拐点、结束拐点、路段宽度和路段限速值,起始拐点的经度记为jan,纬度记为wan,得到坐标点a(jan,wan);结束拐点的经度记为jbn,纬度记为wbn,得到坐标点b(jbn,wbn);路段宽度记为kn;路段限速值记为stn,其中n表示第n个路段;
8、s13.根据如下方法判断车辆是否在路段n内:
9、s131.由坐标点c向坐标点a、坐标点b两点的连线l做垂线,垂足为f点,垂足f点的经度记为jf,纬度记为wf,坐标点记为f(jf,wf);
10、s132.判断垂足f点是否在坐标点a和坐标点b两点连接的线段l上;若在线段l上,则计算坐标点c和垂足f点之间的距离dis;若不在线段l上,则分别比较垂足f点与坐标点a、坐标点b的经纬度,若坐标点a离垂足f点最近,则将坐标点a的经纬度赋值给垂足f点,若坐标点b离垂足f点最近,则将坐标点b的经纬度赋值给垂足f点,再计算已赋值后的垂足f点与坐标点c的距离dis;
11、s133.判断距离dis的值是否小于或等于2×kn,若是,则表示车辆在此路段内,否则,表示车辆不在此路段内;
12、s14.若车辆不在路段n内,则返回步骤s12,循环读取该条路线中下一个路段,若车辆不在该条路线中任一路段,则循环读取该条路线的下一条路线,直至找到车辆所处的路段。
13、进一步,按照如下方法确定垂足f点的经纬度:
14、a1.将坐标点a、坐标点b、坐标点c的经纬度转为直角坐标平面上的坐标,得到点a平面坐标、点b平面坐标以及点c平面坐标;
15、a2.根据点a平面坐标以及点b平面坐标,确定点a与点b之间连线的直线方程;
16、a3.确定垂足f点平面坐标(xf,yf):
17、xf=-(bd+ac)/(b2+a2);
18、yf=b(x-m)/a+n;
19、其中,a、b、c为所述直线方程ax+by+c=0的系数;点c平面坐标为(m,n);
20、d=an-bm;
21、a4.将垂足f点平面坐标转换为f点的经纬度。
22、进一步,根据如下公式确定距离dis:
23、dis=sin(ex)×sin(fx)×cos(ey-fy)+cos(ex)×cos(fx);
24、其中,ex与ey分别表示点c的经纬度、fx与fy分别表示f点的经纬度。
25、进一步,所述预警方式包括单一预警方式和/或组合预警方式;
26、所述单一预警方式包括4000hz且0.2s/次的听觉预警;
27、所述组合预警方式包括听觉预警和视觉预警的组合预警。
28、进一步,所述视觉预警采用led形式:将红、黄、绿作为预警灯的颜色,以驾驶人正视前方的位置为参考点,将led置于驾驶人水平视野±15°范围内、垂直视野向下20°范围内的位置,led的亮度设定在10~20mcd之间。
29、一种基于车路协同的公路在途车辆运行风险预警系统,包括识别单元以及预警单元;
30、所述识别单元,用于实时识别车辆所处的路段;
31、所述预警单元,用于判断车辆的行驶速度是否小于所处路段的限速值,若是,则不进行预警;若否,则选择设定的预警方式对车辆进行预警提醒。
32、进一步,实时识别车辆所处的路段,具体包括:
33、s11.将车辆的实时经度记为jc,实时纬度记为wc,实时速度记为sc,车辆位置标记为坐标点c(jc,wc);坐标c以及速度sc每1秒钟更新一次;
34、s12.从预先存储的数据中读取某条路线中路段n的起始拐点、结束拐点、路段宽度和路段限速值,起始拐点的经度记为jan,纬度记为wan,得到坐标点a(jan,wan);结束拐点的经度记为jbn,纬度记为wbn,得到坐标点b(jbn,wbn);路段宽度记为kn;路段限速值记为stn,其中n表示第n个路段;
35、s13.根据如下方法判断车辆是否在路段n内:
36、s131.由坐标点c向坐标点a、坐标点b两点的连线l做垂线,垂足为f点,垂足f点的经度记为jf,纬度记为wf,坐标点记为f(jf,wf);
37、s132.判断垂足f点是否在坐标点a和坐标点b两点连接的线段l上;若在线段l上,则计算坐标点c和垂足f点之间的距离dis;若不在线段l上,则分别比较垂足f点与坐标点a、坐标点b的经纬度,若坐标点a离垂足f点最近,则将坐标点a的经纬度赋值给垂足f点,若坐标点b离垂足f点最近,则将坐标点b的经纬度赋值给垂足f点,再计算已赋值后的垂足f点与坐标点c的距离dis;
38、s133.判断距离dis的值是否小于或等于2×kn,若是,则表示车辆在此路段内,否则,表示车辆不在此路段内;
39、s14.若车辆不在路段n内,则返回步骤s12,循环读取该条路线中下一个路段,若车辆不在该条路线中任一路段,则循环读取该条路线的下一条路线,直至找到车辆所处的路段。
40、进一步,所述预警方式包括单一预警方式和/或组合预警方式;
41、所述单一预警方式包括4000hz且0.2s/次的听觉预警;
42、所述组合预警方式包括听觉预警和视觉预警的组合预警。
43、进一步,所述视觉预警采用led形式:将红、黄、绿作为预警灯的颜色,以驾驶人正视前方的位置为参考点,将led置于驾驶人水平视野±15°范围内、垂直视野向下20°范围内的位置,led的亮度设定在10~20mcd之间。
44、本发明的有益效果是:本发明公开的一种基于车路协同的公路在途车辆运行风险预警方法及系统,将路段的特征参数预先下发至车载终端中存储,在车辆运行时,只需直接调用已存储的特征参数与车辆实时的经纬度和速度进行对比,便可实现任何路段、任何时间的车辆运行风险预警,避免了路段状态信息数据需要实时更新,在进入高风险路段时,能及时地提醒司机减速慢行,谨慎驾驶。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188605.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表