一种用于交通的全时域运营态势感知系统的制作方法
- 国知局
- 2024-07-31 21:18:16
本发明涉及智能交通和数据处理,尤其涉及一种用于交通的全时域运营态势感知系统。
背景技术:
1、理想化的智慧高速公路系统应该具备高速公路全要素高精度全息感知、高可靠的信息交互和高度自主的智能化交通管控能力,也就是说,应该能在全天候、全路段感知到每一辆车的运动状态,同时能在各种应用场景下对车辆进行精准管控。要实现这一目的,必须寻找一种能够实现全时域感知的基础技术手段。
2、目前高速公路和城市高架路的感知手段以视频监控为主,视频监控容易受到恶劣天气和光照状况的影响,在雨雾天气、逆光条件下感知能力大打折扣。而且由于高速公路感知设备建设阶段不同、技术手段不同、应用场景复杂,呈现出数据形式各异、应用价值不一、融合难度巨大的情况,难以支撑感知层的数智化升级。
3、综上所述,需要一种用于交通的全时域运营态势感知系统来解决现有技术中所存在的不足之处。
技术实现思路
1、针对现有技术的不足,本发明提供了一种用于交通的全时域运营态势感知系统,旨在解决目前目前高速公路的感知受天气影响较大,感知设备数据形式各异、应用价值不一、融合难度巨大的情况,难以支撑感知层的数智化升级的问题。
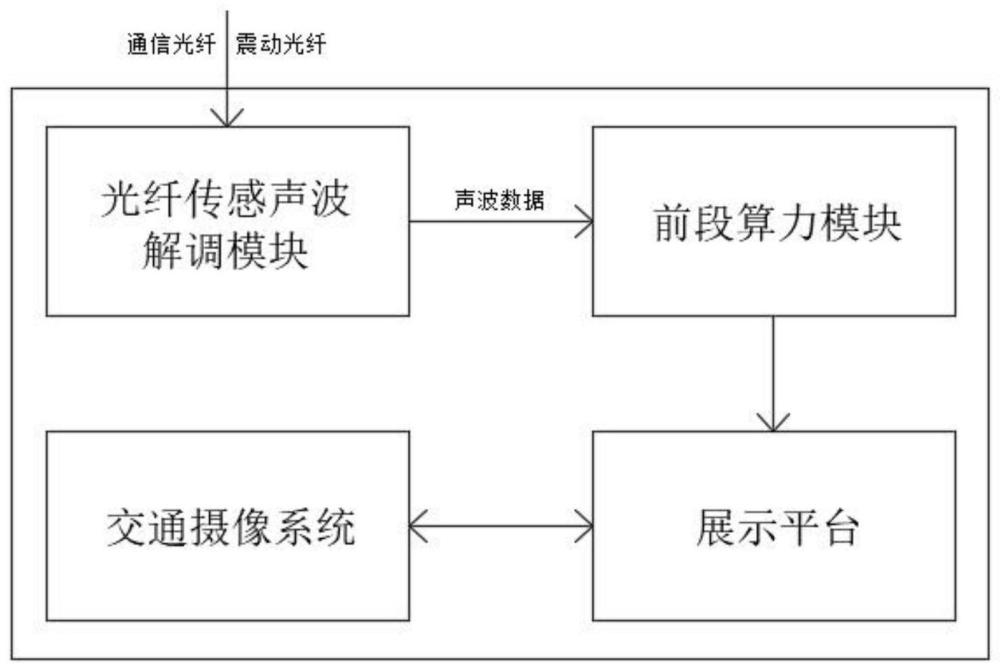
2、为实现上述目的,本发明提供如下技术方案:一种用于交通的全时域运营态势感知系统,包括光纤传感声波解调模块、前端算力模块、展示平台以及交通摄像系统,所述交通摄像头系统用于实时监控道路交通状况、采集交通数据、辅助交通执法,所述光纤传感声波解调模块用于连接光纤进行声波数据采集,所述前端算力模块用于连接光纤传感声波解调模块接收采集到的声波数据并实时运行数据处理算法提取车辆信息,所述展示平台用于接收前端算力模块得到的车辆信息、分析存在的异常事件并与交通摄像系统进行联动。通过光纤传感声波解调模块、前端算力模块以及展示平台的融合使用,实现了对复杂场景下车辆轨迹的有效识别和分离一系列的算法和技术手段,准确地识别和跟踪视频或图像中的车辆轨迹,从而实现对车辆运动状态的监测和管理。
3、进一步地,所述前端算力模块通过数据处理算法提取车辆信息,所述数据处理算法包括以下步骤:
4、步骤1:通过图像标注工具对原始数据中的每一条车辆时空轨迹进行标记,生成车辆标签数据;
5、步骤2:将车辆标签数据和原始图片进行预处理得到增强后数据块并作为训练集输入至深度学习网络模型;
6、步骤3:使用深度学习网络模型进行目标检测,识别出车辆轨迹的整体情况并提取特征数据;
7、步骤4:将步骤3提取的特征数据输入至聚类模型区分出不同的车辆轨迹;
8、步骤5:将步骤4区分出的不同的车辆轨迹输入至车辆分离算法分离出方向交叉车辆的轨迹;
9、步骤6:根据分离出的方向交叉车辆的轨迹生成临时车辆点集集合p_m;
10、步骤7:将临时车辆点集集合p_m(车辆点集数量为m)中的每个点集与已有车辆点集集合p_n(车辆点集数量为n)中各点集进行循环比较;
11、步骤8:循环比较时,当临时车辆点集集合p_m中的点集i隶属于已有车辆点集集合p_n的点集j,点集i将被增补进点集j;当临时车辆点集集合p_m中的点集i不隶属于车辆点集集合p_n中的任意点集,将该点集i补充到已有车辆点集集合p_n,同时新增车辆点集数量至n+l;
12、其中,车辆点集集合p_m表示车辆点集数量为m,车辆点集集合p_n表示车辆点集数量为n。
13、进一步地,所述步骤4中,特征数据输入至聚类模型区分出不同的车辆轨迹,形成不同的簇。
14、进一步地,所述聚类模型区分出不同的车辆轨迹,形成不同的簇的方法包括以下步骤:
15、步骤a1:首先输入待分类的二值图像;
16、步骤a2:然后获取所有数据点的x坐标和y坐标;
17、步骤a3:接着进行dbscan聚类,并获得所有数据点对应的类别标签列表;
18、步骤a4:循环获取类别标签,将二值图像中该类别标签对应的所有数据点赋值为i+1;
19、步骤a5:完成上述步骤后,返回聚类后的数据;
20、步骤a6:根据返回的聚类数据,循环获取其中的车辆获取对应点集;
21、步骤a7:根据步骤a6获取的对应点集通过车辆分离算法来判断是否有交叉情况,如果存在交叉情况,则对当前点集进行处理,如果不存在交叉情况,则将当前点集加入车辆列表;
22、步骤a8:最后,完成所有的车辆处理流程。
23、进一步地,所述步骤a7中,车辆列表包含所有识别出来的车辆及其对应的点集。
24、进一步地,所述步骤5中,不同的车辆轨迹输入至车辆分离算法分离出方向交叉车辆的轨迹,方向交叉车辆的轨迹包括不同行进方向的车流轨迹。
25、进一步地,所述车辆分离算法分离出方向交叉车辆的轨迹的方法包括以下步骤:
26、步骤b1:根据dbscan算法得到的车辆点集集合重新生成图片作为算法输入;
27、步骤b3:初始化车辆点集列表;
28、步骤b2:对输入图片计算x方向相邻数据点之间的差分;
29、步骤b4:从第0行开始提取相邻数据点的差分值为非0的数据,其符号代表了某车辆点集边界;
30、步骤b5:获取左右边界x坐标列表left0,right0;
31、步骤b6:判断左右边界x坐标列表的长度是否相等,若不相等则执行步骤b7,若相等则执行步骤b8;
32、步骤b7:用0增补进列表left0或nx增补进列表right0,使left0和right0保持长度一致;
33、步骤b8:求出中点坐标列表mid0;
34、步骤b9:根据mid0获取当前行内的车辆点集与索引并将其添加至车辆点集集合和索引列表中,车辆个数为n;
35、步骤b10:之后通过行循环获取数据,对每第i行(i>0)数据进行上述处理求出中点坐标列表mid_i,之后与i-1进行比较;
36、步骤b11:判断mid_i与mid_i-1的中元素个数是否相等,若不相等则执行步骤b16,若相等则执行步骤b12;
37、步骤b12:通过双循环,对mid_i中的第idx1个元素和mid_i-1中第idx个元素进行比较;
38、步骤b13:当mid_i中的第idx1个元素可以在mid_i-1中找到任一元素满足abs(mid_i[idx1]-mid_i-1[idx])<=3,若不成立则执行步骤b16,若成立则执行步骤b14;
39、步骤b14:计算mid_i[idx1]和mid_i-1[idx]对应车辆点集斜率k并进行比较,如斜率相同,则将mid_i中的点集加入到mid_i-1对应的车辆点集中;
40、步骤b15:双循环完成后更新当前行的中点坐标和左右边界x坐标mid_i-1=mid_i,left_i-1=left_i,right_i-1=right_i;
41、步骤b16:判定mid_i中第idx1个元素对应的左边界left_i[idx1]是否在mid_i-1中可以找到满足以下条件的任一left_i-1[idx],
42、abs(left_i-1[idx1]-left_i[idx])<3;
43、判定mid_i中第idx1个元素对应的右边界right_i[idx1]是否在mid_i-1中可以找到满足以下条件的任一right_i-1[idx1],
44、abs(right_i-1[idx1]-right_i[idx])<3;
45、若上述right_i-1[idx1]和left_i-1[idx]均存在,认为mid_i[idx1]为交叉点轨迹,直接返回步骤12;若步骤16不成立,车辆点集列表新增一辆车点集,车辆数变为n=n+l,然后跳转步骤b12。
46、进一步地,所述步骤6中,将临时车辆点集集合p_m中的每个点集与已有车辆点集集合p_n中各点集进行循环比较,循环比较的内容包括斜率和起始-结束点的位置。
47、进一步地,所述步骤8中,根据循环比较的结果将临时车辆点集i补充到已有车辆点集j同时根据判定情况新增车辆点集数量至n+l,l为需新增车辆数目。
48、本发明的实质性效果:通过车辆分离模型对原始数据做横向的差值,求出每个信号的左右轮廓,再通过行遍历匹配左右轮廓,当出现交叉情况时会出现多对左右轮廓,在交叉点左右轮廓的数量必定会减少,通过这种条件判断可以将交叉的点集进行分离,从而将不同行进方向的车流进行区分,提取到的车辆轨迹通过分析,可以得到行车方向,车速以及在光缆上的米标位置等信息,通过校正方法,可以将光缆上的米标和交通管养中k标进行一一对应,数据信息通过网络传送到展示平台上,被保存在数据库中,同时,车辆信息被同步到平台系统中进行实时预警和更新,当异常事件发生时,通过校正后得到的k标可以通过系统对现有摄像头系统进行调度,寻找离事件位置最近的摄像头,对事故进行基于图像视频的复核,并且通过车辆速度变化还可以判定是否存在异常停车,交通事故等异常事件。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189181.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表