一种基于云服务的线上智慧停车管理系统及方法与流程
- 国知局
- 2024-07-31 21:18:29
本发明涉及智慧停车管理,具体为一种基于云服务的线上智慧停车管理系统及方法。
背景技术:
1、随着汽车的普及,在节假日或异常天气时,汽车的使用率往往高于日常使用率,在该种情况下会导致停车场中停车位难找,以及停车场内车辆拥堵,使得停车效率低下。
2、在现有技术中,为了解决上述问题,通常根据用户在客户端提交的车位预约情况,对停车场内车辆的进出情况进行管理,但对于停车场内部的车辆行驶情况,无法进行管控,将会导致停车场内部的停车分布不均匀,以及造成停车场内部的拥堵,增加了用户的整体入库停车时间,同时,通过现有技术无法根据用户的停车需求,为用户选择最佳的停车位置。
技术实现思路
1、本发明的目的在于提供一种基于云服务的线上智慧停车管理系统及方法,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:一种基于云服务的线上智慧停车管理方法,所述方法包括:
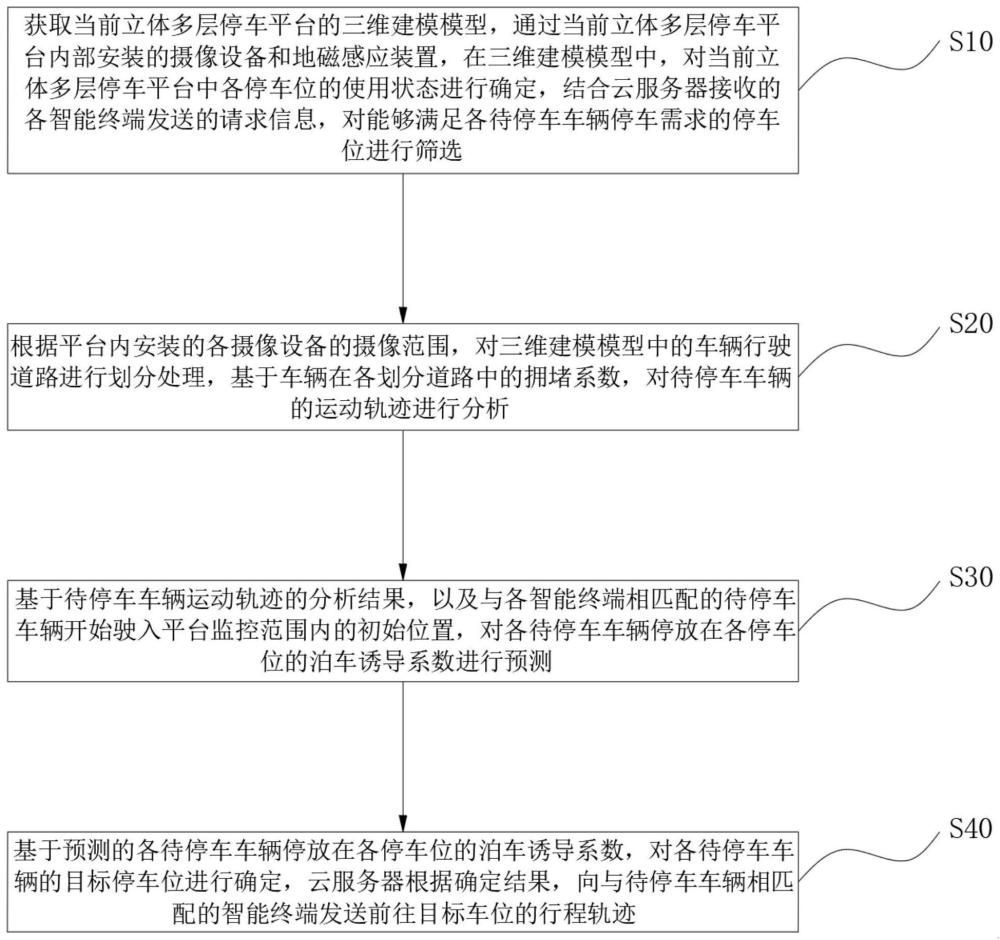
3、s10:获取当前立体多层停车平台的三维建模模型,通过当前立体多层停车平台内部安装的摄像设备和地磁感应装置,在三维建模模型中,对当前立体多层停车平台中各停车位的使用状态进行确定,结合云服务器接收的各智能终端发送的请求信息,对能够满足各待停车车辆停车需求的停车位进行筛选;
4、s20:根据平台内安装的各摄像设备的摄像范围,对三维建模模型中的车辆行驶道路进行划分处理,基于车辆在各划分道路中的拥堵系数,对待停车车辆的运动轨迹进行分析;
5、s30:基于待停车车辆运动轨迹的分析结果,以及与各智能终端相匹配的待停车车辆开始驶入平台监控范围内的初始位置,对各待停车车辆停放在各停车位的泊车诱导系数进行预测;
6、s40:基于预测的各待停车车辆停放在各停车位的泊车诱导系数,对各待停车车辆的目标停车位进行确定,云服务器根据确定结果,向与待停车车辆相匹配的智能终端发送前往目标车位的行程轨迹。
7、进一步的,所述s10包括:
8、s101:云服务器对各智能终端发送的请求信息进行接收,请求信息包括待停车车辆的车辆型号、待停车车辆的乘坐情况、待停车车辆的车牌号,以及智能终端使用者录入的目的地位置和到达目的地的时间,云服务器根据待停车车辆的车辆型号,对待停车车辆的外廓尺寸和净重量进行获取,待停车车辆的外廓尺寸指待停车车辆的长度、宽度、高度,长度、宽度、高度均表示外廓尺寸的特征,云服务器根据待停车车辆的乘坐情况对待停车车辆的重量值进行计算;
9、s102:对待停车车辆的重量值与编号为i的停车位的标准承重值之间的差值gi进行计算,当gi<0时,将编号i放入集合m中,其中,i=1,2,…,m,表示当前立体多层停车平台中各停车位对应的编号,m表示编号总数;
10、s103:对待停车车辆的外廓尺寸中编号为j的特征的特征值,与编号为i的停车位的外廓尺寸中编号为j的特征的特征值之间的差值dij进行计算,对dij<0出现的次数si进行获取,对编号为i的停车位在停放车辆时规定的预留安全距离值ai进行获取,对出现的次数fi进行获取,根据ri=α*si+β*fi对筛选出的停车位进行二次筛选,当ri≠1时,将编号i从集合m中剔除,其中,j=1,2,3,当j=1时,表示外廓尺寸的特征为长度,当j=2时,表示外廓尺寸的特征为宽度,当j=3时,表示外廓尺寸的特征为高度。
11、进一步的,所述s20包括:
12、s201:在各摄像设备上装设一个测速器,根据平台内安装的各摄像设备的摄像范围,对三维建模模型中的行驶道路进行划分处理,当待停车车辆位于初始位置时,通过测速器对车辆在各划分道路中的平均行驶速度进行确定,根据对待停车车辆在各划分道路中的拥堵系数进行计算,安全速度表示当前立体多层停车平台规定的车辆最大行驶速度;
13、s202:在三维建模模型中,以待停车车辆的初始位置为起点,二次筛选后保留的各停车位为终点,对待停车车辆前往各终点的运动轨迹进行确定,对各运动轨迹进行编号处理,编号处理结果为:q=1,2,…,p,表示各运动轨迹对应的编号,p表示运动轨迹总数,在三维建模模型中,对各终点距离编号为z的平台各出口的路程值lz进行获取,若lz≤x,则将待停车车辆前往对应终点的运动轨迹的编号值放入集合nz中,其中,z=1,2,…,z,表示平台内各出口对应的编号值,z表示平台内的出口总数,x表示平台内相邻两出口之间的设置间隔距离值;
14、s203:对各运动轨迹所包含的划分道路进行确定,对确定的各划分道路对应的拥堵系数与各划分道路对应的路程值之间的乘积进行计算,对计算的乘积与d的比值进行计算,对计算的比值进行求和处理,得到各运动轨迹的行驶系数,在集合nz中,按照各运动轨迹对应的行驶系数由大到小的顺序对各运动轨迹的编号值进行排序,对排序最小值对应的编号值进行确定,对确定的编号值对应的运动轨迹进行保留,其中,d表示各划分道路对应的道路值中的最大值。
15、进一步的,所述s30对各待停车车辆停放在各停车位的泊车诱导系数进行预测的具体方法为:
16、基于集合nz保留的运动轨迹,对保留的各运动轨迹对应的停车位的编号值进行获取,设获取的编号值为tz,1≤tz≤m,在三维建模模型中,对待停车车辆从初始位置运动至获取的编号为tz的停车位的车位中心位置时所需要的路程值进行获取,通过地图软件,对智能终端使用者录入的目的地位置距离编号为z的平台出口的距离值h进行获取,对智能终端使用者从获取的编号为tz的停车位的车位中心位置,运动至编号为z的平台出口时所需要的路程值进行获取;
17、结合智能终端使用者录入的到达目的地的时间值,对待停车车辆停放在编号为tz的停车位的泊车诱导系数进行预测,具体的预测模型为:
18、
19、其中,v1z表示车辆位于集合nz保留的运动轨迹中时,车辆在当前立体多层停车平台内部的平均运动速度值,v2表示智能终端使用者在当前立体多层停车平台内部的平均运动速度值,t2表示待停车车辆进入平台内部初始位置时对应的时间值,t1表示智能终端使用者录入的到达目的地的时间值,表示待停车车辆停放在编号为tz的停车位的泊车诱导系数。
20、进一步的,所述s40包括:对中的最大值进行确定,对确定的最大值对应的停车位编号值进行确定,确定的停车位编号值对应的停车位为待停车车辆的目标停车位,其中,max表示最大值符号;
21、将目标停车位与保留的各运动轨迹对应的终点进行匹配,在三维建模模型中,若目标停车位的位置与终点位置一致,则对应保留的运动轨迹为待停车车辆的行程轨迹。
22、一种基于云服务的线上智慧停车管理系统,所述系统包括停车位筛选模块、运动轨迹分析模块、泊车诱导系数预测模块和行程轨迹确定模块;
23、所述停车位筛选模块用于对能够满足各待停车车辆停车需求的停车位进行筛选;
24、所述运动轨迹分析模块用于对待停车车辆的运动轨迹进行分析;
25、所述泊车诱导系数预测模块用于对各待停车车辆停放在各停车位的泊车诱导系数进行预测;
26、所述行程轨迹确定模块用于通过云服务器,向与待停车车辆相匹配的智能终端发送前往目标车位的行程轨迹。
27、进一步的,所述停车位筛选模块包括信息获取单元、初步筛选单元和筛选确定单元;
28、所述信息获取单元通过云服务器接受的各智能终端发送的请求信息,对各待停车车辆的外廓尺寸和净重量进行获取,结合云服务器接受的待停车车辆的乘坐情况,对待停车车辆的重量值进行获取;
29、所述初步筛选单元根据信息获取单元获取的重量值,对能够满足各待停车车辆停车需求的停车位筛选出;
30、所述筛选确定单元根据信息获取单元获取的外廓尺寸,对能够满足各待停车车辆停车需求的停车位进行确定。
31、进一步的,所述运动轨迹分析模块包括拥堵系数计算单元、运动轨迹确定单元、行驶系数计算单元和运动轨迹分析单元;
32、所述拥堵系数计算单元通过各摄像设备上装设的测速器,对车辆在各划分道路中的平均行驶速度进行确定,根据拥堵系数计算公式,对待停车车辆在各划分道路中的拥堵系数进行预测;
33、所述运动轨迹确定单元在三维建模模型中,以待停车车辆的初始位置为起点,筛选确定单元确定的各停车位为终点,对待停车车辆前往各终点的运动轨迹进行确定,结合各终点距离平台各出口的路程值,对确定的运动轨迹进行分类处理;
34、所述行驶系数计算单元根据拥堵系数计算单元的计算结果,以及各划分道路对应的路程值,对各运动轨迹的行驶系数进行计算;
35、所述运动轨迹分析单元根据行驶系数计算单元的计算结果,对运动轨迹的保留情况进行分析。
36、进一步的,所述泊车诱导系数预测模块包括参数获取单元和泊车诱导系数预测单元;
37、所述参数获取单元基于保留的运动轨迹,对保留的运动轨迹对应的停车位进行确定,在三维建模模型中,对待停车车辆从初始位置运动至确定的停车位的车位中心位置时所需要的路程值、对智能终端使用者录入的目的地位置距离对应平台出口的距离值,以及对智能终端使用者从确定的停车位的车位中心位置,运动至对应平台出口时所需要的路程值进行获取;
38、所述泊车诱导系数预测单元基于参数获取单元获取的路程值和距离值,以及智能终端使用者录入的到达目的地的时间值,对待停车车辆停放在确定的停车位的泊车诱导系数进行预测。
39、进一步的,所述行程轨迹确定模块根据预测的泊车诱导系数中的最大值,对待停车车辆的目标停车位进行确定,将目标停车位与保留的各运动轨迹对应的终点进行匹配,基于匹配结果,对待停车车辆的行程轨迹进行确定。
40、与现有技术相比,本发明所达到的有益效果是:
41、1.本发明通过云服务器对各智能终端发送的请求信息进行处理,基于处理结果,对能够满足与各智能终端相匹配的待停车车辆停车需求的停车位进行筛选,结合车辆在各划分道路中的拥堵系数,对各待停车车辆的运动轨迹进行分析,通过对待停车车辆停放在分析保留的运动轨迹对应的停车位的泊车诱导系数进行预测,实现对待停车车辆在当前立体多层停车平台内部的行程轨迹进行规划,提高了车辆在当前立体多层停车平台内部的停车效率。
42、2.本发明在对各待停车车辆的目标停车位进行确定的过程中,考虑到车辆在各划分道路中的拥堵系数,以及各划分道路对应的路程值,保证当前立体多层停车平台中的划分道路被充分利用,避免出现主干道路过度拥堵的情况发生,减少了待停车车辆的整体入库停车时间。
43、3.本发明在对各待停车车辆的行程轨迹进行确定的过程中,考虑到各智能终端使用者的停车需求,且在考虑到停车需求的情况下能够对各待停车车辆的最佳停车位置进行确定,进一步提高了系统对车辆的线上智慧管理效果。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189196.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表