煤矿井下行车前方弯道和岔路口预警方法与流程
- 国知局
- 2024-07-31 21:20:58
本发明涉及煤矿辅助运输安全,尤其涉及一种煤矿井下行车前方弯道和岔路口预警方法。
背景技术:
1、无轨胶轮车作为煤矿辅助运输的重要组成部分,其行车安全问题一直备受关注。井下弯道、岔路口作为井下运输的必经之路,受光照不足、空间狭窄、操作半径小、路面斜度大等因素影响,使得车辆的操控难度增大,易发生安全事故。因此,在行车过程中针对岔路口、弯道的提前识别,并及时为司机提供对向来人或来车提醒,将有助于提升无轨胶轮车行车安全水平。
2、目前针对煤矿井下路口管控技术解决方案主要包括以下三种:
3、(1)通过在弯道处安装传感器、信号接口、控制器和声光报警器,实现就地控制,提升弯道处的运输安全水平。
4、(2)基于车辆实时位置数据与红绿灯控制技术,实现重要路口的安全管控。
5、(3)采用监控基站、信号灯控制和车辆自动调度系统,实现路口的车辆调度功能。
6、现有技术方案存在显著的不足,具体表现在以下几个方面:
7、1.项目成本高:技术方案极度依赖硬件设备,尤其在井下这种弯道多、路口复杂的环境中,不仅加大设备实施的难度,还导致项目成本增加,影响了技术的推广。
8、2.灵活性差:在煤矿采掘作业过程中,井下巷道会随着作业进展而发生变动。尤其在高产量大型矿井中,这种变化更为频繁。然而,现有的技术方案在巷道变动后,需要维护人员进行重新安装和调试,灵活性不足。
9、3.可维护性差:维护人员在井下调试好设备的运行参数后,一旦外部环境发生变化,需要变更参数时,就必须重新下井进行调试。整个调试过程费时费力。
技术实现思路
1、本发明要解决的技术问题是:为了解决现有技术中项目成本高、灵活性差以及可维护性差的技术问题。本发明提供一种煤矿井下行车前方弯道和岔路口预警方法,具有成本低、低延迟以及可维护性好的优点,本发明解决其技术问题所采用的技术方案是:一种煤矿井下行车前方弯道和岔路口预警方法,包括以下步骤:
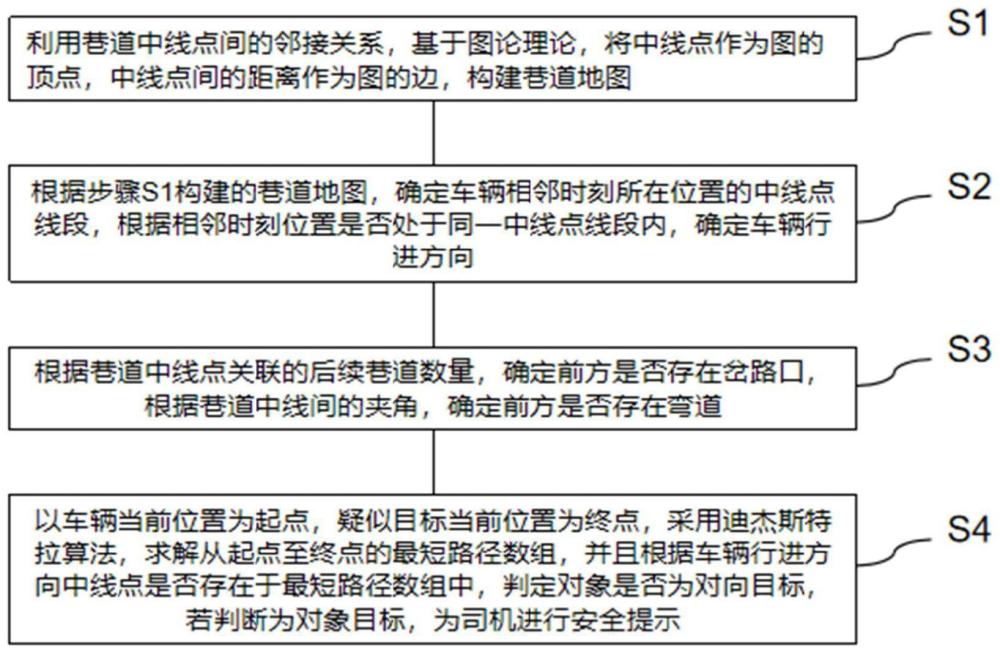
2、s1、利用巷道中线点间的邻接关系,基于图论理论,将中线点作为图的顶点,中线点间的距离作为图的边,构建巷道地图;
3、s2、根据步骤s1构建的巷道地图,确定车辆相邻时刻所在位置的中线点线段,根据相邻时刻位置是否处于同一中线点线段内,确定车辆行进方向;
4、s3、根据巷道中线点关联的后续巷道数量,确定前方是否存在岔路口,根据巷道中线间的夹角,确定前方是否存在弯道;
5、s4、以车辆当前位置为起点,疑似目标当前位置为终点,采用迪杰斯特拉算法,求解从起点至终点的最短路径数组,并且根据车辆行进方向中线点是否存在于最短路径数组中,判定对象是否为对向目标,若判断为对象目标,为司机进行安全提示。
6、进一步地,在步骤s1中,包括以下步骤:
7、s11、将矿井的采掘工程平面图进行逻辑处理,采用图g=(v,e)描述,其中v为顶点集合,e为边集合;
8、s12、数据填充规则为:
9、
10、式中:a.arcs为邻接矩阵元素,i,j为元素行列,e为边集合,wij为顶点i至顶点j的权重;
11、形成巷道地图的数据层级关系,其中,以中线点起点、中线点终点构建中线点线段,以若干中线点线段构建巷道中线,以若干巷道中线构建巷道地图。
12、进一步地,在步骤s2中,包括以下步骤:
13、s21、巷道地图数据被载入队列中,完成巷道地图的初始化;
14、s22、依次比对车辆当前位置是否处于中线内;若处于,则进入下一个阶段,若不处于则遍历中线点线段,直至完成所有中线点线段的扫描;
15、s23、计算向量内积值,通过内积值的正负向,获得最终行进方向端点,以获取行进方向。
16、进一步地,在步骤s22和s23中,车辆相邻时刻位置均处于同一中线点线段内,设车辆相邻时刻的位置为t1和t2,设a、b为中线点线段的两个端点,则有
17、式中:ω为结果值,为端点a和b构建的空间向量,为车辆相邻时刻位置构建的空间向量;
18、根据公式3,确认行进方向端点,
19、进一步地,在步骤s3中,岔路口和弯道的判断包括以下步骤:
20、s31、设车辆前方在range米内出现弯道或岔路口进行预警,设dist为车辆前进方向的相邻中线点间的距离,设linknum为车辆前进方向连接巷道数据;
21、s32、获取预设的判断距离值range,并计算车辆当前位置至行进方向的距离值dist;
22、s33、判断range与dist的关系,若range≤dist,判断为前方为直路,若range>dist,判断连接数linknum,若linknum<1,判断为前方为封闭路段,若linknum=1,判断为弯道或直通路,若存在夹角,判断为弯道,如不存在夹角,判断为若linknum>1,判断前方为岔路口;
23、s34、若当前为直通路,采用range=range-dist规则,更新range值,重新进入步骤s33,得到前方路段为弯道或是岔路口。
24、本发明的有益效果是,本发明的煤矿井下行车前方弯道和岔路口预警方法,整套技术方案是通过上位机软件算法模块调整运行参数,无需下井实施,提高了项目的可维护性;采用uwb精确定位技术,目前该项技术精度为厘米级别,可确保车辆和人员的实时定位精度。同时,一般情况下,uwb精确定位基站是智能化矿山建设的标配,车载终端是无轨胶轮车的标配。因此,整套技术方案在未新增额外硬件设备的情况下,实现了井下行车前方路口的安全管控,具有低成本的特性;经过某实验现场验证,在软件算法处理前后增加性能监听函数,累计记录50次判断耗时。运行最大耗时约为34ms,最小耗时约为11ms,平均耗时为22ms,具有低延迟特性。
技术特征:1.一种煤矿井下行车前方弯道和岔路口预警方法,其特征在于,包括以下步骤:
2.如权利要求1所述的煤矿井下行车前方弯道和岔路口预警方法,其特征在于,在步骤s1中,包括以下步骤:
3.如权利要求2所述的煤矿井下行车前方弯道和岔路口预警方法,其特征在于,在步骤s2中,包括以下步骤:
4.如权利要求3所述的煤矿井下行车前方弯道和岔路口预警方法,其特征在于,在步骤s22和s23中,车辆相邻时刻位置均处于同一中线点线段内,设车辆相邻时刻的位置为t1和t2,设a、b为中线点线段的两个端点,则有
5.如权利要求4所述的煤矿井下行车前方弯道和岔路口预警方法,其特征在于,在步骤s3中,岔路口和弯道的判断包括以下步骤:
技术总结本发明涉及煤矿辅助运输安全技术领域,尤其涉及一种煤矿井下行车前方弯道和岔路口预警方法,包括以下步骤:S1、利用巷道中线点间的邻接关系,基于图论理论,将中线点作为图的顶点,中线点间的距离作为图的边,构建巷道地图;S2、根据步骤S1构建的巷道地图,确定车辆相邻时刻所在位置的中线点线段,根据相邻时刻位置是否处于同一中线点线段内,确定车辆行进方向;S3、根据巷道中线点关联的后续巷道数量,确定前方是否存在岔路口,根据巷道中线间的夹角,确定前方是否存在弯道;S4、判定对象是否为对向目标,若判断为对象目标,为司机进行安全提示。本发明的预警方法,具有成本低、低延迟以及可维护性好的优点。技术研发人员:韩燕南,高文,贺耀宜,茅译,谭江涛,樊泽辉,杨耀,陈醒,丁磊,汤利平,荆诚,朱沙沙,张顺受保护的技术使用者:天地(常州)自动化股份有限公司技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240731/189366.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表