控制方法、控制装置及程序与流程
- 国知局
- 2024-07-31 21:27:24
本发明涉及控制方法、控制装置及程序,特别涉及为了远程监视多个移动体而使用的控制装置的控制方法、控制装置及程序。
背景技术:
1、近年来,以方便性的提高为目的,考虑了车辆或机器人等移动体自主地在公路上行驶,通过配送食物或接送人等的任务来进行服务。
2、但是,在现阶段,例如在前行道路上有掉落物等障碍物的情况下,车辆或机器人不能自主地行驶而会停止等,所以需要进行远程控制。
3、对此,例如在专利文献1中,公开了一种用于操作处于远程地的车辆的车辆远程操作系统。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2004-206218号公报
技术实现思路
1、发明要解决的课题
2、但是,在上述现有技术中,存在如下问题:当远程操纵者远程监视多个自动驾驶车辆时,在远程操纵者需要远程操纵自动驾驶车辆的情况下,关于怎样控制其他自动驾驶车辆并没有进行研究。
3、本公开是鉴于上述情况而做出的,目的在于提供即使存在需要远程操纵的移动体也能够抑制其他移动体进行的服务的恶化的控制方法、控制装置及程序。
4、用来解决课题的手段
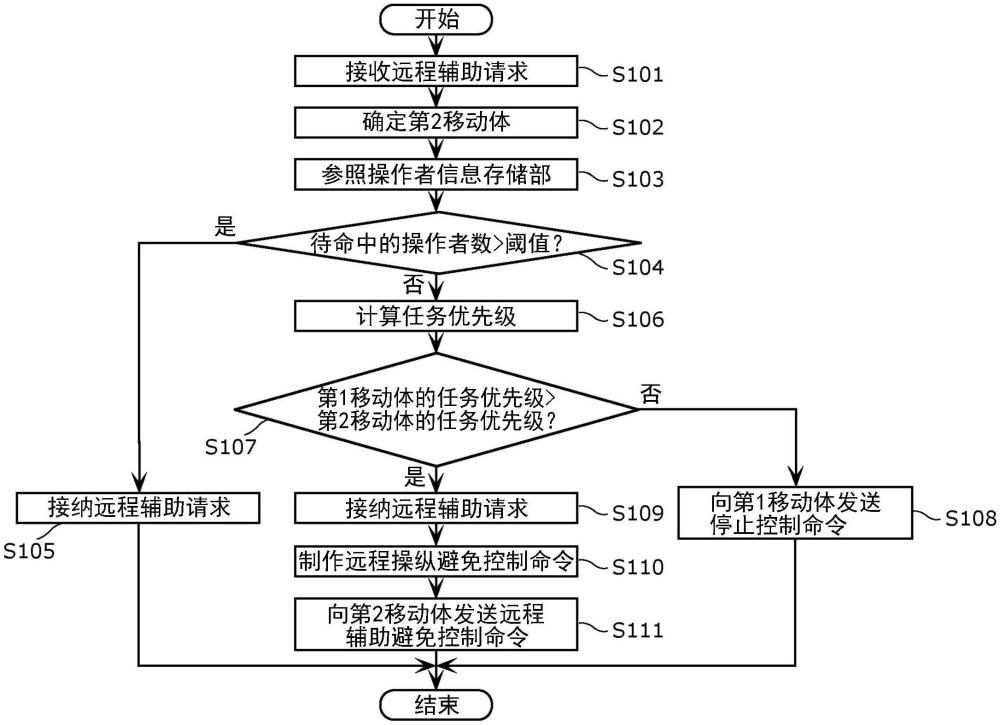
5、为了解决上述课题,本公开的一技术方案的控制方法,是为了对分别自主执行任务的多个移动体进行远程监视而使用的控制装置的控制方法,从上述多个移动体中的第1移动体,接收表示要求远程操纵的辅助的远程辅助请求;确定第2移动体,该第2移动体是上述第1移动体以外的移动体;取得与上述第1移动体进行的第1任务有关的第1任务信息以及与上述第2移动体进行的第2任务有关的第2任务信息;基于上述第1任务信息及上述第2任务信息,计算上述第1任务及上述第2任务的优先级;在上述第1任务的优先级比上述第2任务的优先级低的情况下,向上述第1移动体发送第1控制命令,该第1控制命令用来不妨碍上述第2移动体进行上述第2任务地对上述第1移动体进行远程操纵。
6、另外,这些总括性或具体性的技术方案可以由装置、系统、集成电路、计算机程序或计算机可读取的cd-rom等记录介质来实现,也可以由系统、方法、集成电路、计算机程序及记录介质的任意组合来实现。
7、发明效果
8、根据本公开的控制方法等,即使存在需要远程操纵的移动体,也能够抑制其他移动体进行的服务的恶化。
技术特征:1.一种控制方法,是为了对分别自主执行任务的多个移动体进行远程监视而使用的控制装置的控制方法,其特征在于,
2.如权利要求1所述的控制方法,其特征在于,
3.如权利要求2所述的控制方法,其特征在于,
4.如权利要求2所述的控制方法,其特征在于,
5.如权利要求4所述的控制方法,其特征在于,
6.如权利要求2所述的控制方法,其特征在于,
7.如权利要求6所述的控制方法,其特征在于,
8.如权利要求2所述的控制方法,其特征在于,
9.如权利要求8所述的控制方法,其特征在于,
10.如权利要求1~9中任一项所述的控制方法,其特征在于,
11.如权利要求1~9中任一项所述的控制方法,其特征在于,
12.一种控制装置,为了对分别自主执行任务的多个移动体进行远程监视而使用,其特征在于,
13.一种程序,用来使计算机执行为了对分别自主执行任务的多个移动体进行远程监视而使用的控制装置的控制方法,其特征在于,
技术总结本公开的控制方法是为了对分别自主执行任务的多个移动体进行远程监视而使用的控制装置的控制方法,从多个移动体中的第1移动体接收表示要求远程操纵的辅助的远程辅助请求(S101);确定作为第1移动体以外的移动体的第2移动体(S102);取得与第1移动体进行的第1任务有关的第1任务信息以及与第2移动体进行的第2任务有关的第2任务信息;基于第1任务信息及第2任务信息,计算第1任务及第2任务的优先级(S106);在第1任务的优先级比第2任务的优先级低的情况下,向第1移动体发送用来不妨碍第2移动体进行第2任务地对第1移动体进行远程操纵的第1控制命令(S108)。技术研发人员:日下部敏彦受保护的技术使用者:松下知识产权经营株式会社技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240731/189603.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。