一种基于地区需求的共享景区代步车动态配置方法与流程
- 国知局
- 2024-07-31 21:28:51
本发明涉及信息,尤其涉及一种基于地区需求的共享景区代步车动态配置方法。
背景技术:
1、在旅游景区中,游客使用代步车出行时面临诸多技术难题。首先,景区道路状况复杂多变,存在拥堵、坡度大、路面湿滑等情况,需要根据实际道路状况配置合适的代步车。但目前景区缺乏实时、全面的道路状况监测手段,难以精准掌握道路信息,导致代步车选择和配置不当,影响游客出行体验和安全。其次,代步车照明系统无法适应景区内部光照的动态变化。景区地形地貌复杂,山路、隧道、树荫等环境光照差异大。当前代步车大多采用恒定照明,难以满足复杂光照环境下的行驶需求,尤其是在光照骤变时,如隧道进出口,极易引发视觉不适和驾驶危险。最后,代步车照明控制缺乏与道路状况的联动,未充分考虑道路状况对车灯的需求差异。在道路湿滑、可见度低的情况下,应适当增大车灯亮度,以提升照明效果;而在道路良好、光照充足时,则可适度降低亮度,减少不必要的能耗。目前代步车照明控制与道路状况脱节,未建立两者间的有效映射和动态调节机制,不利于提升代步车的安全性和节能性。综上,景区代步车面临道路状况感知不足、照明适配不佳、车灯控制策略单一等技术问题,导致代步车选型和运行优化困难,无法为游客提供个性化、智能化的出行服务,景区管理者亟需寻求创新的解决方案。
技术实现思路
1、本发明提供了一种基于地区需求的共享景区代步车动态配置方法,主要包括:
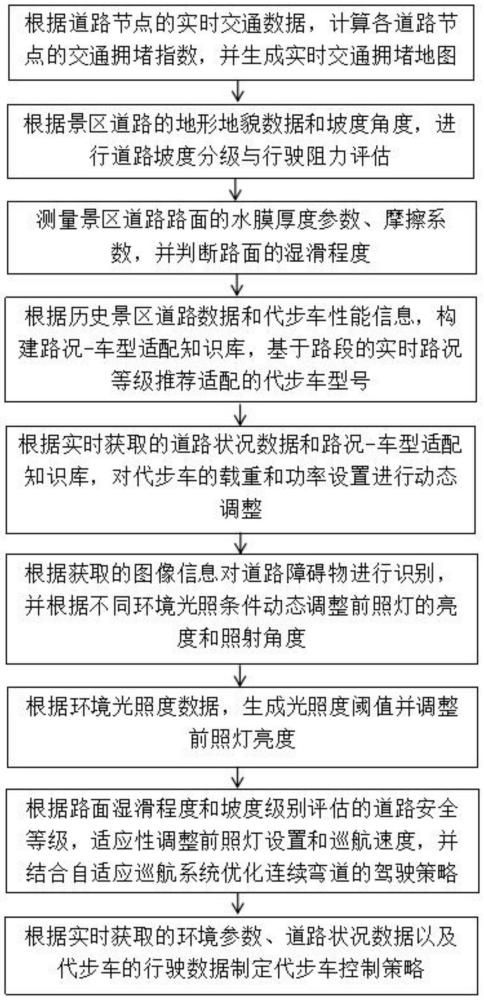
2、通过监控摄像头获取景区内各道路节点的实时交通数据,计算各道路节点的交通拥堵指数,并根据交通拥堵指数生成实时交通拥堵地图;
3、根据景区道路的地形地貌数据和坡度角度,建立带坡度属性的道路三维模型,并进行道路坡度分级与行驶阻力评估;
4、通过测量景区道路路面的水膜厚度参数、摩擦系数,判断路面的湿滑程度,并根据路面湿滑程度,实施相应的路面安全预警与管控措施;
5、根据历史景区道路数据和代步车性能信息通过关联规则挖掘构建路况-车型适配知识库,基于路段的实时路况等级推荐适配的代步车型号;
6、基于路况-车型适配知识库的关联规则和实时获取的道路状况数据,通过智能配置推理引擎对代步车的载重和功率设置进行动态调整,并利用代步车的实时状态数据预测代步车性能变化趋势,形成代步车配置的持续优化和故障预警;
7、根据代步车的可见光摄像头、红外热成像仪及可见光-红外复合光照传感器获取实时可见光图像信息、热辐射图像和环境光照度数据,通过图像预处理和语义分割对道路障碍物进行识别,并根据不同环境光照条件动态调整前照灯的亮度和照射角度;
8、中央处理系统通过can总线接收环境光照度数据,生成光照度阈值并调整前照灯亮度,基于代步车的车速、转向角度和电池soc优化照明效果和供电策略;
9、根据路面湿滑程度和坡度级别评估的道路安全等级,适应性调整前照灯设置和巡航速度,利用车载仪表盘显示屏和hud抬头显示器提供安全驾驶提示,并结合自适应巡航系统优化连续弯道的驾驶策略;
10、根据实时获取的环境参数、道路状况数据以及代步车的行驶数据,利用循环神经网络和粒子群优化算法制定代步车控制策略,并通过fota技术进行代步车控制策略的远程部署与故障诊断。
11、进一步地,所述通过监控摄像头获取景区内各道路节点的实时交通数据,计算各道路节点的交通拥堵指数,并根据交通拥堵指数生成实时交通拥堵地图,包括:
12、通过景区的各道路节点的监控摄像头,实时获取道路节点的交通数据,交通数据包括代步车流量、行驶速度;将获取到的道路节点的交通数据传输到中央交通管理系统,并对交通数据进行预处理,预处理包括去除异常值、填充缺失值以及数据归一化处理;通过历史交通数据构建交通拥堵指数公式其中,v是车流量,单位为车辆数/小时,c是该路段的设计代步车容量,s1是该路段的标准行驶速度,s2是实测的平均行驶速度;使用交通拥堵指数公式得到道路节点实时交通状态的交通拥堵指数;根据道路节点的交通拥堵指数和预设的交通拥堵等级判定阈值,判断景区内交通拥堵的道路节点和路段,生成实时交通拥堵地图;若存在道路节点或路段的交通拥堵指数连续多个时间周期超过预设周期阈值,则触发交通拥堵预警,向景区管理人员发送拥堵告警信息;根据全景区内各道路节点的历史交通流量、历史速度,使用arma算法进行模型训练,预测未来预设时间段内发生交通拥堵的道路节点和路段,生成交通拥堵预测地图;将实时交通拥堵地图、交通拥堵预测地图通过电子警示牌、电子广播和车载终端地图,引导景区内代步车合理绕行。
13、进一步地,所述根据景区道路的地形地貌数据和坡度角度,建立带坡度属性的道路三维模型,并进行道路坡度分级与行驶阻力评估,包括:
14、获取景区道路的地形地貌数据,使用sketchup建立景区道路地形三维模型;在景区道路上设置gps接收机和三轴倾角传感器的布设点,其中,布设点按照预设间隔距离设置;通过gps接收机获取布设点的空间坐标,通过三轴倾角传感器测量布设点的坡度角度,坡度角度包括纵向和横向坡度角;将gps接收机和三轴倾角传感器获取的数据进行配准,生成带有坡度属性的道路三维点云数据;利用相邻布设点间的高差和水平距离计算道路的纵向坡度,并通过布设点间的横向高差计算道路的横向坡度;根据道路工程技术标准和道路的纵横向坡度数值,对道路各路段坡度进行分级,得到各路段的坡度级别,其中,坡度级别包括平缓坡度、轻度坡度、中度坡度、陡峭坡度;在道路地形三维模型上附加渲染各路段的坡度级别,生成道路纵横向坡度分布的三维立体图;根据道路纵横向坡度分布,使用行驶阻力公式f=mgsin(θ)+μmgcos(θ)计算各路段的行驶阻力,其中m是代步车质量,g是重力加速度,θ是坡度角,μ是摩擦系数,μ通过锁定轮式摩擦系数测量仪获取;根据行驶阻力和代步车的燃油效率模型估算各路段的燃油消耗,并关联路段的交通流量数据,评估路段的通行舒适度和经济性;根据路段的通行舒适度和经济性,提出道路优化和管理建议,包括整坡度、改善路面材料、安装坡度警告标志和速度限制标志、限制重载代步车进入或推荐低峰时段通行。
15、进一步地,所述通过测量景区道路路面的水膜厚度参数、摩擦系数,判断路面的湿滑程度,并根据路面湿滑程度,实施相应的路面安全预警与管控措施,包括:
16、在预设水膜测量点同时配置激光散射传感器和超声波传感器,实时测量景区道路路面的水膜厚度;通过加权平均的方法处理激光散射传感器和超声波传感器获取的道路路面的水膜厚度数据,确定最终水膜厚度值;利用锁定轮式摩擦系数测量仪,对路面摩擦系数μ进行测量;根据测得的水膜厚度和摩擦系数,参照国际路面摩擦系数标准,将路面湿滑程度进行等级划分,包括极低湿滑风险、低湿滑风险、中等湿滑风险、高湿滑风险、极高湿滑风险;设定路面湿滑等级的预警阈值和管控阈值,若路面湿滑程度达到中等湿滑风险及以上,则发出预警提示,若湿滑等级达到高湿滑风险及以上,则进行道路安全管控;对在预警阈值和管控阈值范围内的道路路段起讫点设置湿滑警示标志,在道路gis地图上以不同颜色标记出不同湿滑等级的路段,并通过电子警示牌和车载终端地图发布湿滑警示信息及安全建议。
17、进一步地,所述根据历史景区道路数据和代步车性能信息通过关联规则挖掘构建路况-车型适配知识库,基于路段的实时路况等级推荐适配的代步车型号,包括:
18、通过道路监测系统和景区代步车管理系统,获取近期预设时间段内的历史景区道路数据,建立景区道路数据的时间序列数据集,景区道路数据包括道路拥堵指数、坡度值、路面湿滑程度、代步车的重量、功率;对获取的历史景区道路数据进行数据清洗和归一化处理;根据预设的道路拥堵指数划分阈值将道路拥堵指数划分为5个等级,并根据预设的纵向坡度划分阈值和预设的横向坡度划分阈值将纵坡和横坡各划分为3个等级,形成路况的多级离散属性;获取代步车性能信息,性能信息包括代步车重量、功率,根据代步车的重量、功率进行分类,将代步车按照重量划分为轻型、中型、重型,将代步车按照功率分为小功率、中功率、大功率;采用apriori关联规则挖掘算法,以路况等级和代步车等级为项目集,以路况参数和代步车参数的关联度为置信度,设置最小支持度阈值和最小置信度阈值,从时间序列数据集中挖掘出强关联规则;基于提升度lift指标对挖掘出的关联规则进行排序和评估,剔除提升度小于预设第一提升度阈值的负相关规则和提升度高于第二提升度阈值的虚假关联规则,得到优质关联规则集;根据优质关联规则集,构建路况与车型的多对多映射关系矩阵,形成路况-车型适配知识库,记录在指定路况等级下适配的车型等级组合;将路况-车型适配知识库封装为服务接口,与代步车推荐系统对接,若游客提交某路段的出行需求,推荐系统根据路段的实时路况等级,检索路况-车型适配知识库,推荐适配的代步车型号。
19、进一步地,所述基于路况-车型适配知识库的关联规则和实时获取的道路状况数据,通过智能配置推理引擎对代步车的载重和功率设置进行动态调整,并利用代步车的实时状态数据预测代步车性能变化趋势,形成代步车配置的持续优化和故障预警,包括:
20、通过道路监测系统获取的实时道路状况数据,道路状况数据包括道路拥堵指数、道路纵向坡度和道路横向坡度以及路面湿滑程度,将路况数据封装为json格式的路况信息包,并通过mqtt协议将路况信息包发送至代步车智能配置推理引擎;通过智能配置推理引擎对路况信息包进行解析,提取各项路况数据的参数值,根据路况-车型适配知识库的关联规则,使用最大置信度原则确定最优车型等级组合;将将道路坡度归一化到一个标准范围,使用三角形隶属度函数为归一化的坡度值分配一个隶属度得分,通过加权平均去模糊化方法计算载重调整系数,并根据载重调整系数和车型额定载重量,得到调整后的建议载重量;从关联规则库中查询道路拥挤度、坡度、湿滑度与代步车功率的映射关系矩阵,采用d-s证据理论将道路拥挤度、坡度、湿滑度作为识别框架中的子集,运用参数隶属度函数计算基本概率赋值;使用dempster组合规则进行证据融合,得到电机功率调节的概率分布,按最大概率原则确定最优的功率调节策略,并将调节指令下发至车载控制器,车载控制器根据智能配置推理引擎提供的参数包,动态调整代步车的超载报警阈值和电机功率输出曲线;根据预设的固定周期获取代步车的状态数据,并上传至sql数据库,代步车的状态数据包括行驶速度、电机电流;根据代步车的状态数据,使用自回归积分滑动平均模型,预测代步车性能变化趋势和潜在的故障时间点;根据代步车性能变化趋势和潜在的故障时间点的预测结果,更新代步车的配置设置,形成智能闭环控制,代步车的配置包括电机功率设置、载重限制。
21、进一步地,所述根据代步车的可见光摄像头、红外热成像仪及可见光-红外复合光照传感器获取实时可见光图像信息、热辐射图像和环境光照度数据,通过图像预处理和语义分割对道路障碍物进行识别,并根据不同环境光照条件动态调整前照灯的亮度和照射角度,包括:
22、通过安装在代步车前部的可见光摄像头实时获取车前方道路的可见光图像信息,通过安装在代步车前部的可见光-红外复合光照传感器实时获取环境光照度数据;通过车载红外热成像仪实时获取道路前方的热辐射图像;将摄像头采集的可见光图像和红外热成像仪获取的热辐射图像进行图像预处理,将可见光摄像头和红外摄像头的图像在时间和空间上同步,图像预处理包括图像对齐和图像校正;将预处理后的可见光和红外图像输入到基于深度学习的语义分割模型enet中进行语义分割,将图像中的每个像素分类到相应的类别,类别包括路面、代步车、行人;通过canny边缘检测算法从分割的图像中提取障碍物的轮廓;通过车载图像处理器,基于障碍物的轮廓估算障碍物在图像中的尺寸,并结合摄像头的校准参数,计算代步车与障碍物之间的距离;根据代步车与障碍物之间的距离和车速数据,判断代步车是否存在碰撞风险;利用可见光-红外复合光照传感器获取的环境光照度数据,设定不同场景下的环境光照度阈值,动态调整前照灯的开启和关闭时机,场景包括白天、黄昏、夜晚;若环境光照度低于当前场景的下限阈值,则通过车载控制系统发送开灯指令,同时将环境光照度数值通过模糊控制算法映射到pwm信号,根据环境光照度与目标亮度的偏差,动态调整前照灯的亮度;根据车速和障碍物距离信息,构建模糊规则库,动态调节前照灯的照射角度,若障碍物与代步车距离小于预设距离阈值或车速大于预设车速阈值,则减小照射角度,反之则增大照射角度;通过双路can总线将环境感知数据和控制参数实时传输到车载控制器,控制器根据接收到的控制参数下发控制指令,控制器根据接收到的数据协调灯光的开关、亮度和角度,环境感知数据包括可见光图像、环境光照度、红外图像、障碍物位置、障碍物和代步车的距离。
23、进一步地,所述中央处理系统通过can总线接收环境光照度数据,生成光照度阈值并调整前照灯亮度,基于代步车的车速、转向角度和电池soc优化照明效果和供电策略,包括:
24、中央处理系统通过can总线实时获取光-红外复合光照传感器的环境光照度数据,并设置光-红外复合光照传感器的采样频率;通过均值滤波算法对实时获取到的环境光照度数据进行平滑处理,使用模糊控制算法根据一天内不同时间段的环境光照度数据拟合出连续光滑的光照度阈值曲线,并根据当前的天气状况对阈值曲线进行自适应校正,动态生成光照度阈值,天气状况包括晴天、阴天、雨天;若实时环境光照度低于当前时刻的光照度阈值,则通过中央处理系统向前照灯控制器发送开启指令,并根据光照度与阈值的偏差、当前的车速和转向角信息,通过二维模糊控制器计算亮度调节系数;前照灯控制器根据接收到的调节系数,通过pwm信号调节前灯的电流,进行前灯亮度的无级变化的调整;通过中央处理系统实时监测代步车的行驶状态,获取车速、转向角度、电池soc,若代步车速度低于预设第二速度阈值、转弯、电量值低于预设电量值阈值状态时,则提高前照灯亮度;通过接收led灯珠的实际电流值,并结合环境光照度,评估当前照明效果,若照明效果未达到预期,则进行亮度二次调节,直至满足照明效果;通过中央处理系统根据环境光照变化和前照灯工作状态,自动调节代步车的供电策略。
25、进一步地,所述根据路面湿滑程度和坡度级别评估的道路安全等级,适应性调整前照灯设置和巡航速度,利用车载仪表盘显示屏和hud抬头显示器提供安全驾驶提示,并结合自适应巡航系统优化连续弯道的驾驶策略,包括:
26、获取路面湿滑程度和坡度级别的历史数据,采用决策树算法进行模型训练,构建道路安全等级评估模型,得到道路安全等级,道路安全等级包括安全、警告、危险;根据道路安全等级调整前照灯设置,前照灯设置包括触发阈值、照射角度和亮度;若道路安全等级低于预设等级,则降低巡航速度,增强前照灯亮度;若前照灯亮度高于预设亮度,则根据代步车行驶速度和转向半径,实时调整前照灯的光照范围和亮度;若代步车行驶至连续弯道,则根据连续弯道的曲率半径和道路湿滑程度,规划前方路段的最佳巡航速度和转向时机;通过仪表盘显示屏和hud抬头显示器提供可视化的安全提示,并结合自适应巡航系统进行主动车速和转向调整。
27、进一步地,所述根据实时获取的环境参数、道路状况数据以及代步车的行驶数据,利用循环神经网络和粒子群优化算法制定代步车控制策略,并通过fota技术进行代步车控制策略的远程部署与故障诊断,包括:
28、通过环境感知系统实时获取环境参数,环境参数包括气温、湿度、光照强度、风速、风向;通过道路监测系统,实时监测和获取道路状况数据;通过车载传感器和行车记录仪,获取代步车的行驶数据,行驶数据包括行驶里程、速度、加速度、转向角;根据环境参数、道路状况数据和代步车的行驶数据,使用循环神经网络算法进行模型训练,得到代步车控制策略参数,并通过粒子群优化算法确定全局最优控制策略,代步车控制策略参数包括前后轴扭矩分配系数、电机功率限值、前照灯灯束角度和led亮度;将优化后的代步车控制策略封装成动态链接库,通过远程软件升级技术fota部署至代步车系统中;通过软件冗余和硬件冗余机制,采用双通道异构备份,进行控制策略的故障诊断和容错保护。
29、本发明实施例提供的技术方案可以包括以下有益效果:
30、本发明公开了一种基于地区需求的共享景区代步车动态配置方法。本发明通过实时监控道路状况并生成交通拥堵地图,可以精确掌握和应对各路段的交通流量,从而优化游客的出行路线和减少拥堵。还根据道路的地形和坡度分析,自动调整代步车的配置,以适应复杂多变的道路条件,保证车辆安全顺畅地通过各类路段。此外,本发明通过测量路面的湿滑程度并实时调整前照灯亮度及角度,根据实际道路状况提供适当的照明,大幅提高了在不良天气或光照条件下的行车安全。通过实时数据监测和智能调整,本发明还能预测和识别潜在的车辆性能问题,及时进行调整或提醒,避免事故发生,保护乘客安全。总体而言,本发明通过集成先进的监控技术和动态调整机制,不仅提高了景区交通管理的效率和精确性,还提升了游客的乘车体验和安全保障,实现了景区代步车服务的智能化。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189690.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。