机器人作业区数字化安全防控系统的制作方法
- 国知局
- 2024-07-31 22:17:59
本发明涉及自动化生产,尤其是涉及机器人作业区数字化安全防控系统。
背景技术:
1、随着机器人技术的不断成熟,工业机器人在经历了诞生、成长、成熟后,已成为制造业中必不可少的装备。工业机器人在工厂里已经成为工人必不可少的伙伴。但一起发生在特斯拉工厂的机器人伤人事件也使人们意识到与机器人一起工作存在着严重的不可预估的生命危险。
2、目前,针对工业机器人的常规安全措施是划定工业机器人作业区域。在该工作人员进入工业机器人作业区域时实行挂牌上锁制度。即在工业机器人作业区域入口出设置安全锁。工作人员进入工业机器人作业区域前,先将安全插销拔出,然后将安全锁锁在安全插销的锁孔上,防止安全插销意外复位。安全插销控制工业机器人的总电源,当安全插销拔出后工业机器人断电,这样能保证工作人员在工业机器人工作区域内时,机器人不能意外上电工作。但这种方式仅能保证按规定挂锁进入工业机器人工作区域的人员安全,在没有有按照规定操作或者是进入人数与安全锁数量不匹配的情况下仍容易出现事故。
3、随着技术的发展,目前也有一些方案通过广角摄像头或光栅检测来判断工业机器人工作区域内是否有人员存在。但是光栅检测仅能判断有人进去,并不能确定有多少人进入。同时光栅在复杂场景下可靠性不够好,上限较低。广角摄像头又存在过分依赖拍摄光线、区域覆盖不全,存在死角的问题,均无法保证工业机器人工作时,百分之百的确认工作区域内没有人员存在。因此单纯计数摄像头对光线敏感,光照变化后容易出现错误。
技术实现思路
1、本发明目的在于提供一种机器人作业区数字化安全防控系统,用于解决机器人作业区内人员精确识别问题,减少机器人造成的人员伤亡。
2、为实现上述目的,本发明采取下述技术方案:
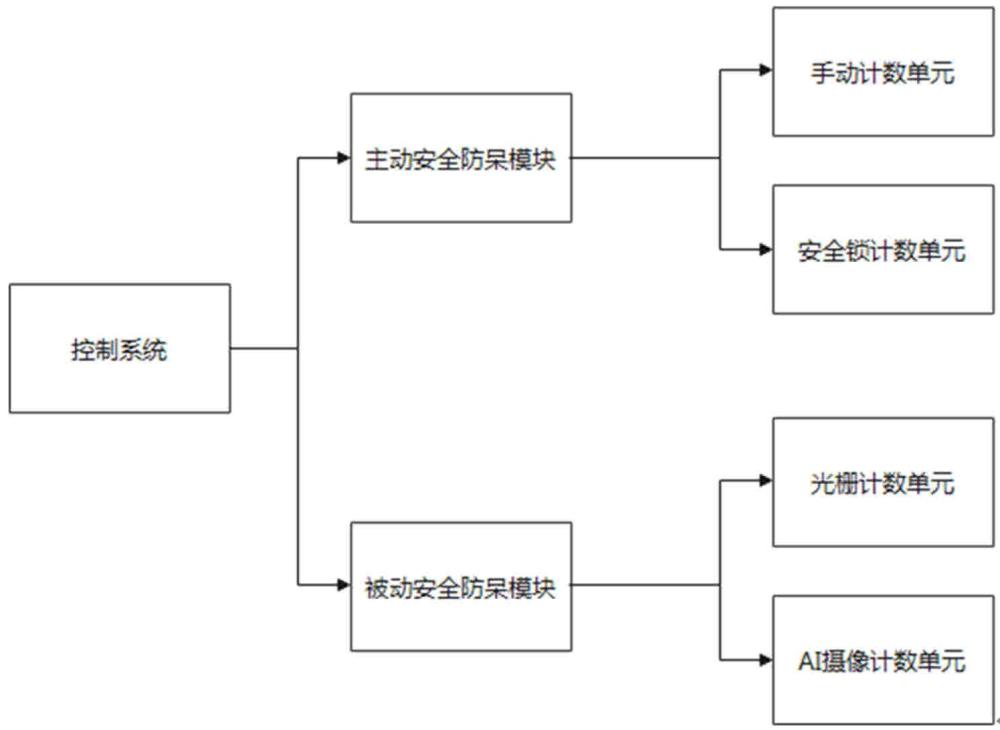
3、本发明所述的一种机器人作业区数字化安全防控系统,包括主动安全防呆模块、被动安全防呆模块和控制系统;
4、所述主动安全防呆模块包括手动计数单元和安全锁计数单元;
5、所述被动安全防呆模块包括光栅计数单元和ai摄像计数单元;
6、所述控制系统通过分析手动计数单元、安全锁计数单元、光栅计数单元、ai摄像单元的计数数据,确认人员出入数量,形成数据互锁关系,确保人员安全。
7、进一步地,所述手动计数单元由若干旋钮开关组成,通过检测旋钮开关的状态确定人员进出数量。
8、进一步地,所述安全锁计数单元通过在安全插销上的接近开关检测器确定的安全锁数量,确定人员进出数量。
9、进一步地,所述光栅计数单元通过安装在机器人作业区入口处的内外两个光栅确定人员进出数量。
10、进一步地,所述ai摄像计数单元通过安装在机器人作业区入口上方的双目3d视频人流计数摄像头跟踪进出人员,确定人员进出数量。
11、进一步地,光栅计数和摄像头数据进行对比,如果数据不一致,根据检测时间和现场各项参数确定光栅和摄像头那个数据更真实,然后黄色警告
12、进一步地,所述控制系统用于提供现场手动计数单元和安全锁计数单元的状态,以及光栅计数单元和ai摄像计数单元的计数情况,在数据不一致时,发出报警提示。
13、进一步地,光栅计数单元通过内外两个光栅的切断顺序,统计进出机器人作业区的人员数量。
14、本发明的优点在于在现有安全挂锁方案中增加人员计数旋钮,做到一人一码,并配合ai摄像头和光栅对进出人员进行精确检测,克服单一依靠光栅和摄像头检测人员的局限性。同时将ai摄像头和光栅检测的人员数量与人员计数旋钮和安全挂锁检测到的人员数量进行精确对比,实现人员进出机器人作业区的全过程监控,避免人员滞留设备启动造成的危险情况。同时,本发明还可以通过报警提示,提醒相关人员提高警惕。
技术特征:1.一种机器人作业区数字化安全防控系统,其特征在于:包括主动安全防呆模块、被动安全防呆模块和控制系统;
2.根据权利要求1所述的一种机器人作业区数字化安全防控系统,其特征在于:所述手动计数单元由若干旋钮开关组成,通过检测旋钮开关的状态确定人员进出数量。
3.根据权利要求1所述的一种机器人作业区数字化安全防控系统,其特征在于:所述安全锁计数单元通过在安全插销上的接近开关检测器确定的安全锁数量,确定人员进出数量。
4.根据权利要求1所述的一种机器人作业区数字化安全防控系统,其特征在于:所述光栅计数单元通过安装在机器人作业区入口处的内外两个光栅确定人员进出数量。
5.根据权利要求1所述的一种机器人作业区数字化安全防控系统,其特征在于:所述ai摄像计数单元通过安装在机器人作业区入口上方的双目3d视频人流计数摄像头跟踪进出人员,确定人员进出数量。
6.根据权利要求1所述的一种机器人作业区数字化安全防控系统,其特征在于:所述控制系统用于提供现场手动计数单元和安全锁计数单元的状态,以及光栅计数单元和ai摄像计数单元的计数情况,在数据不一致时,发出报警提示。
7.根据权利要求4所述的一种机器人作业区数字化安全防控系统,其特征在于:光栅计数单元通过内外两个光栅的切断顺序,统计进出机器人作业区的人员数量。
技术总结本发明公开了一种机器人作业区数字化安全防控系统,包括主动安全防呆模块、被动安全防呆模块和控制系统。本发明的优点在于在现有安全挂锁方案中增加人员计数旋钮,做到一人一码,并配合AI摄像头和光栅对进出人员进行精确检测,克服单一依靠光栅和摄像头检测人员的局限性。同时将AI摄像头和光栅检测的人员数量与人员计数旋钮和安全挂锁检测到的人员数量进行精确对比,实现人员进出机器人作业区的全过程监控,避免人员滞留设备启动造成的危险情况。同时,本发明还可以通过报警提示,提醒相关人员提高警惕。技术研发人员:王腾飞,杨河洲,孟令山,段彦垒,宋永健,马巍,毕曙光,海江,朱延彬受保护的技术使用者:郑州日产汽车有限公司技术研发日:技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240731/192657.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表