基于多孔结构且能贴合复杂表面的柔性装置及其制造方法
- 国知局
- 2024-08-02 15:29:10
本申请涉及柔性电子,尤其涉及基于多孔结构且能贴合复杂表面的柔性装置及其制造方法。
背景技术:
1、随着柔性电子技术的发展,很多柔性转移印刷技术得到了长足发展,可适用于宏观尺度到微纳米尺度的功能器件的抓取和转印。这种技术能够行之有效地将不同种类、独立制备的离散元件进行大规模集成,进而形成空间有序的功能系统。
2、可转印的材料范围非常广,从复杂分子材料,如自组装的单层材料、功能高分子材料、dna和光刻胶等,到高性能硬质材料,如无机单晶硅半导体、金属材料和氧化物薄膜等,以及完全集成的设备,如薄膜晶体管、发光二极管、传感器阵列和太阳能电池等都可以用转印技术进行组装。这些功能系统和器件的材料越来越多样,结构越来越复杂,相应地,要求转印技术既能全局和高速并行,又能选择性、编程性精确地进行。
3、传统转印方法一般使用转印印章实现,依靠印章与施主基底上制备的部件之间的吸引力把部件从施主基底上拾取下来;转移到受主基底上之后,减弱印章与部件之间的吸引力,把部件印刷到受主基底上。
4、很多情况下,需要印章转印一些本身表面复杂的器件,或在一些狭窄空间等人手无法到达的区域主动适应器件所在目标曲面而完成抓取和转印。特别是对于这些微纳米尺度的器件,印章与部件贴合不紧时容易抓不牢。这就需要印章具有与部件的复杂表面相应(例如相贴合)的构型,以能够增大印章与部件之间的接触面积。但现有的印章无法实现构型的精确变换。
5、另外,对于柔性抓手技术来说,现有的抓手主要利用气动、光驱动等驱动方式实现柔性抓手构型的改变,进而改变(例如增大)抓手与物体表面间接触面积,以实现物体的抓取。同样难以实现抓手构型的精确变换,难以实现对具有复杂表面的微纳米尺度部件的抓取。
6、因此,例如印章、抓手等具有抓取功能的部件还有改进的空间。
技术实现思路
1、为了解决或缓解背景技术提到的至少一个问题,本申请提供了基于多孔结构且能贴合复杂表面的柔性装置及其制造方法。
2、本申请实施方式提供的基于多孔结构且能贴合复杂表面的柔性装置包括柔性装置基部,所述柔性装置基部开设有多个孔,且所述柔性装置基部形成为平面型或非平面型的构型,所述柔性装置基部包括:
3、变形层,所述变形层包括能够受热驱动变形或受电驱动变形的柔性材料;
4、驱动层,所述驱动层连接于所述变形层,用于为所述变形层提供热或电;
5、静电吸附层,所述静电吸附层连接于所述变形层或所述驱动层,所述静电吸附层包括用于产生静电吸附力的金属叉指电极。
6、在本申请的一个实施方式中,所述变形层包括液晶弹性体,所述柔性装置基部还包括连接于所述变形层或所述驱动层的骨架层,所述骨架层的材料的弹性模量大于所述变形层的所述液晶弹性体的弹性模量。
7、在本申请的一个实施方式中,所述变形层包括形状记忆合金、形状记忆聚合物、介电弹性体、热膨胀系数不同的双层复合材料中的至少一者。
8、在本申请的一个实施方式中,所述变形层包括至少两个变形区域,所述至少两个变形区域的弹性模量不同。
9、在本申请的一个实施方式中,所述变形层包括至少两个变形层孔隙设置区域,所述至少两个变形层孔隙设置区域的孔隙率不同。
10、在本申请的一个实施方式中,所述变形层、所述驱动层和所述骨架层叠放在一起且开孔位置相同,所述柔性装置基部包括至少两个基部孔隙设置区域,所述至少两个基部孔隙设置区域的孔隙率不同。
11、在本申请的一个实施方式中,所述静电吸附层包括多个所述金属叉指电极,多个所述金属叉指电极位于所述柔性装置基部的底面。
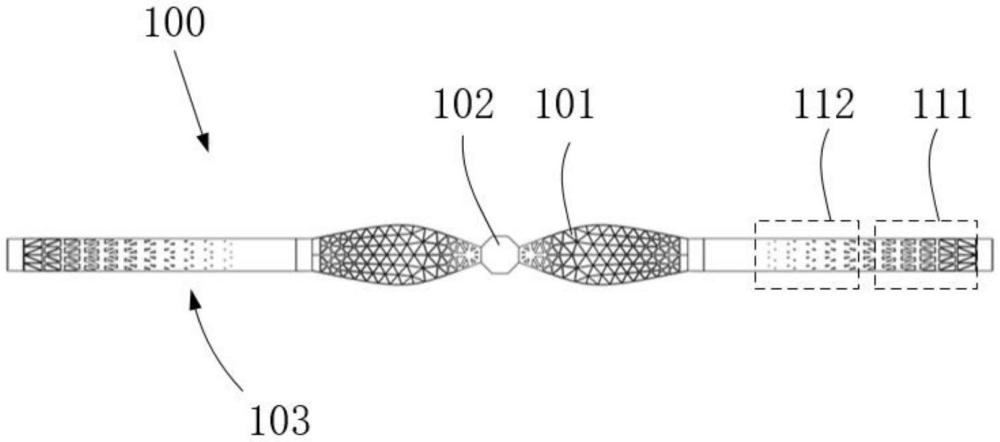
12、在本申请的一个实施方式中,所述柔性装置基部呈现为条状,所述柔性装置基部包括:
13、位于所述柔性装置基部的中心处的层叠区,多个所述柔性装置基部的所述层叠区堆叠设置;
14、位于所述中心处以外的抓取区,所述柔性装置形成为章鱼构形。
15、本申请实施方式提供的基于多孔结构且能贴合复杂表面的柔性装置的制造方法为前述的柔性装置的制造方法,所述制造方法包括:
16、提供所述柔性装置基部的平面构型的前驱体;
17、提供预拉伸的弹性平台,将所述前驱体粘贴于所述预拉伸的弹性平台;
18、解除所述弹性平台的拉伸状态,使得所述柔性装置基部具有非平面的三维构型。
19、在本申请的一个实施方式中,所述变形层的材料为液晶弹性体,所述制造方法包括:
20、提供所述变形层;
21、提供多材料拉伸平台,所述多材料拉伸平台具有至少两个弹性模量不同的拉伸区域;
22、将所述变形层转印于所述多材料拉伸平台;
23、拉伸所述多材料拉伸平台,同时所述变形层也受到拉伸;
24、紫外曝光所述变形层。
25、本申请提供的柔性装置通过变形层和驱动层能够主动且精确地实现构型变换,能够贴合各种复杂表面。柔性装置基于静电吸附层可以实现对物体的按需灵活吸附与解除吸附。多孔结构设计能够进一步地调整柔性装置的弯曲刚度,以调整变形精确程度,实现对复杂特定三维构型的定制,对具有复杂表面的器件或在狭窄场景中对处于复杂表面的器件进行转印和抓取。
技术特征:1.一种基于多孔结构且能贴合复杂表面的柔性装置,其特征在于,所述柔性装置包括柔性装置基部(100),所述柔性装置基部(100)开设有多个孔(101),且所述柔性装置基部(100)形成为平面型或非平面型的构型,所述柔性装置基部(100)包括:
2.根据权利要求1所述的基于多孔结构且能贴合复杂表面的柔性装置,其特征在于,所述变形层(110)包括液晶弹性体,所述柔性装置基部(110)还包括连接于所述变形层(110)或所述驱动层(120)的骨架层(130),所述骨架层(130)的材料的弹性模量大于所述变形层(110)的所述液晶弹性体的弹性模量。
3.根据权利要求1所述的基于多孔结构且能贴合复杂表面的柔性装置,其特征在于,所述变形层(110)包括形状记忆合金、形状记忆聚合物、介电弹性体、热膨胀系数不同的双层复合材料中的至少一者。
4.根据权利要求1所述的基于多孔结构且能贴合复杂表面的柔性装置,其特征在于,所述变形层(110)包括至少两个变形区域,所述至少两个变形区域的弹性模量不同。
5.根据权利要求1所述的基于多孔结构且能贴合复杂表面的柔性装置,其特征在于,所述变形层(110)包括至少两个变形层孔隙设置区域,所述至少两个变形层孔隙设置区域的孔隙率不同。
6.根据权利要求2所述的基于多孔结构且能贴合复杂表面的柔性装置,其特征在于,所述变形层(110)、所述驱动层(120)和所述骨架层(130)叠放在一起且开孔位置相同,所述柔性装置基部(100)包括至少两个基部孔隙设置区域,所述至少两个基部孔隙设置区域的孔隙率不同。
7.根据权利要求1所述的基于多孔结构且能贴合复杂表面的柔性装置,其特征在于,所述静电吸附层(140)包括多个所述金属叉指电极(141),多个所述金属叉指电极(141)位于所述柔性装置基部(100)的底面。
8.根据权利要求1所述的基于多孔结构且能贴合复杂表面的柔性装置,其特征在于,所述柔性装置基部(100)呈现为条状,所述柔性装置基部(100)包括:
9.一种基于多孔结构且能贴合复杂表面的柔性装置的制造方法,其特征在于,其为权利要求1至8中任一项所述的柔性装置的制造方法,所述制造方法包括:
10.根据权利要求9所述的基于多孔结构且能贴合复杂表面的柔性装置的制造方法,其特征在于,所述变形层(110)的材料为液晶弹性体,所述制造方法包括:
技术总结本申请提供了基于多孔结构且能贴合复杂表面的柔性装置及其制造方法。该柔性装置包括柔性装置基部,柔性装置基部开设有多个孔,且柔性装置基部形成为平面型或非平面型的构型。柔性装置基部包括变形层、驱动层和静电吸附层。变形层包括能够受热驱动变形或受电驱动变形的柔性材料。驱动层连接于变形层,用于为变形层提供热或电。静电吸附层连接于变形层或驱动层,静电吸附层包括用于产生静电吸附力的金属叉指电极。该柔性装置的制造方法包括:提供柔性装置基部的平面构型的前驱体;提供预拉伸的弹性平台,将前驱体粘贴于预拉伸的弹性平台;解除弹性平台的拉伸状态,使得柔性装置基部具有非平面的三维构型。技术研发人员:张一慧,庞文博,徐世威受保护的技术使用者:清华大学技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240801/246309.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
正压防爆柜结构的制作方法
下一篇
返回列表