一种场景动态匹配相机预曝光时间计算与自主配置方法
- 国知局
- 2024-08-05 11:38:54
本发明属于光学相机应用,涉及一种场景动态匹配相机预曝光时间计算与自主配置方法。
背景技术:
1、航空、航天各类遥感图像能够迅速、准确获取地物信息,在自然、地理、勘探、测绘等应用领域发挥着重要作用。但地面场景起伏多变、光照与观测条件复杂、大气透过状态随机性强,现有技术手段预设积分时间、增益等参数,但仍难以有效适应环境的随机性变化,遥感图像可能存在动态范围偏窄、有效量化和有效信息不足的问题,随着航拍图像分辨率提高,数据量显著增大,hdr处理算法在航空航天遥感平台上应用受限。地面处理方面,多是通过直方图调整、多曝光图像融合、多尺度图像融合等地面处理方法增强图像清晰度与对比度,但这些处理算法无法从机理上解决图像动态范围窄、有效量化不足的问题,且图像中暗场景和边缘区域的处理性能会受到制约。
2、在成像相机前端以一定前置夹角安装场景动态匹配相机,通过提前曝光拍摄拟定任务区域图像,实时解算估计场景辐射信息,进行成像相机成像参数的设计与动态调整,对进一步提升暗或亮场景细节信息的分辨能力具有重要意义,但实际应用中还存在诸多工程技术问题。比如,场景动态匹配相机需要提前曝光进行测光成像,但预曝光时长受观测角度、平台飞行速度、飞行高度、前置角度等众多因素有关,缺少平台有限计算资源下的场景动态匹配相机预曝光时间自主配置的必要手段。
技术实现思路
1、本发明的目的是面向场景动态匹配相机应用需求,提供了一种场景动态匹配相机预曝光时间计算与自主配置方法,通过飞行器平台高度、速度、姿态角以及场景动态匹配相机前置角度等信息,考虑地球曲率影响,计算需要提前曝光的时间,形成查找表,支撑场景动态匹配相机前置时间自主配置。
2、本发明的目的是通过以下技术方案实现的:
3、一种场景动态匹配相机预曝光时间计算与自主配置方法,包括如下步骤:
4、步骤一:定义飞行器坐标系,将姿态控制角转换为观测角,建立三维观测几何模型,具体步骤如下:
5、步骤一一:以质心为原点,x轴沿飞行器平台结构纵轴,指向飞行方向,z轴在对称平面内,垂直于纵轴,指向地心,y轴垂直对称平面,与x、y轴组成右手系;绕x、y、z轴旋转分别为滚转、俯仰、偏航角;
6、步骤一二:通过旋转矩阵,将旋转角度换算到euler角“1-2-3”转序或ypr模式中“3yaw-2pitch-1roll”转序,此时滚转、俯仰、偏航角度恰好与对地观测角相统一,进而根据飞行高度、地球半径,建立三维观测几何模型;
7、步骤二:根据飞行高度、速度、前置角度、姿态角等工况信息,建立预曝光时间与观测角变化关系表征模型,具体步骤如下:
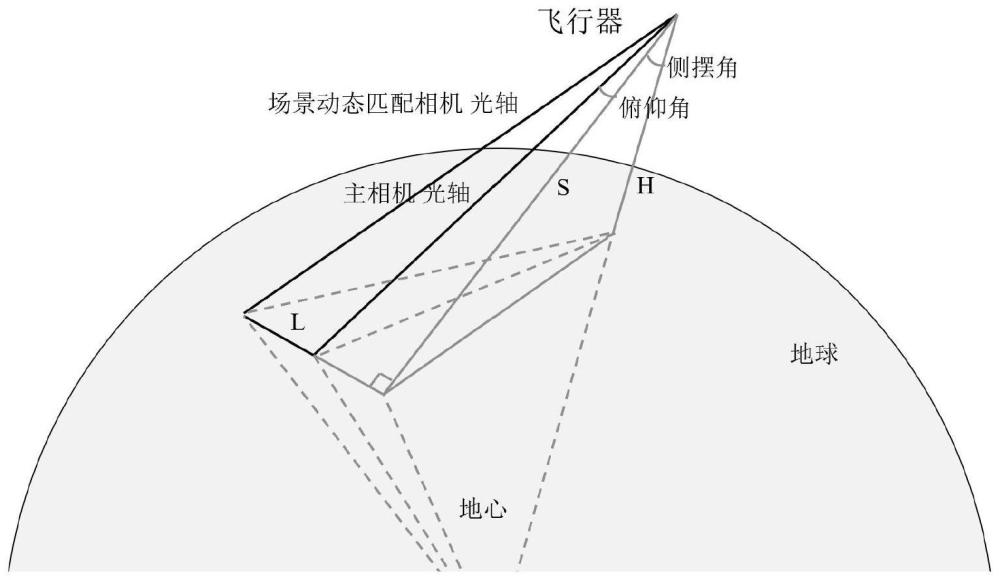
8、步骤二一:根据步骤一计算所得的观测角度、飞行高度、地球半径等信息计算成像相机与场景动态匹配相机光轴在地球表面的实际距离l:
9、
10、式中,r表示地球半径;sin()表示正弦函数;argsin()表示反正弦函数;α表示场景动态匹配相机安装的前置角度;θp为对地俯仰角;s表示飞行器与其地面视线方向的垂直距离,计算公式为:
11、
12、式中,h表示飞行器的飞行高度;π表示圆周率;θr为对地侧摆角;
13、步骤二二:假设考虑地球自转后成像相机光轴在地面上移动速度为v,则预曝光时间表征为:
14、t=lcosθy/v
15、式中,cos()表示余弦函数;t为预曝光时间计算结果;θy为对地偏航角;
16、步骤三:建立预曝光时间与姿态控制角等参数的查找表,通过插值计算实现参数自主配置,具体步骤如下:
17、步骤三一:根据步骤一得到的三维观测几何模型、步骤二得到的预曝光时间与观测角变化关系表征模型,根据实际使用需求,遍历计算不同姿态角等参数条件下预曝光时间,形成查找表,储存到飞行器中,进而根据飞行器计算资源情况;
18、步骤三二:通过最邻近插值、线性插值或三次样条插值等不同插值方法得到实际工况中所需要的预曝光时间,实现场景动态匹配相机使用参数的自主配置,若飞行器平台计算资源充足,也可直接按照步骤一、步骤二部署预曝光时间计算算法,实现参数配置。
19、相比于现有技术,本发明具有如下优点:
20、(1)本发明为场景动态匹配相机实际工程应用提供了不可或缺的支撑条件;
21、(2)本发明通过建立三维观测几何模型,兼顾地球曲率、转速等影响,提出了预曝光时间随观测角变化规律表征模型;
22、(3)本发明形成了典型工况条件下,姿态控制角等工况参数与预曝光时间关系查找表,实现预曝光时间自主查询配置的同时有效减少硬件资源消耗。
技术特征:1.一种场景动态匹配相机预曝光时间计算与自主配置方法,其特征在于所述方法包括如下步骤:
2.根据权利要求1所述的场景动态匹配相机预曝光时间计算与自主配置方法,其特征在于所述步骤一的具体步骤如下:
3.根据权利要求1所述的场景动态匹配相机预曝光时间计算与自主配置方法,其特征在于所述步骤二的具体步骤如下:
4.根据权利要求3所述的场景动态匹配相机预曝光时间计算与自主配置方法,其特征在于所述s的计算公式为:
5.根据权利要求1所述的场景动态匹配相机预曝光时间计算与自主配置方法,其特征在于所述步骤三的具体步骤如下:
6.根据权利要求5所述的场景动态匹配相机预曝光时间计算与自主配置方法,其特征在于所述插值方法为最邻近插值、线性插值或三次样条插值。
7.根据权利要求1所述的场景动态匹配相机预曝光时间计算与自主配置方法,其特征在于若飞行器平台计算资源充足,可直接按照步骤一、步骤二部署预曝光时间计算算法,实现参数配置。
技术总结本发明公开了一种场景动态匹配相机预曝光时间计算与自主配置方法,所述方法如下:步骤一:定义飞行器坐标系,将姿态控制角转换为观测角,建立三维观测几何模型;步骤二:根据飞行高度、速度、前置角度、姿态角工况信息,建立预曝光时间与观测角变化关系表征模型;步骤三:建立预曝光时间与姿态控制角的查找表,通过插值计算实现参数自主配置。本发明为场景动态匹配相机实际工程应用提供了不可或缺的支撑条件;通过建立三维观测几何模型,兼顾地球曲率、转速等影响,提出了预曝光时间随观测角变化规律表征模型;形成了典型工况条件下,姿态控制角等工况参数与预曝光时间关系查找表,实现预曝光时间自主查询配置的同时有效减少硬件资源消耗。技术研发人员:江世凯,姜嘉欣,胡建明,穆永琦,鲍广震,智喜洋,张伟,巩晋南受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/258602.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表