一种基于车载CAN数据的车辆载荷高精度估算方法
- 国知局
- 2024-08-05 11:56:20
本发明属于车辆载荷,尤其涉及一种基于车载can数据的车辆载荷高精度估算方法。
背景技术:
1、车辆载荷是影响车辆控制性能和驾驶员感受的重要参数,而道路坡度也会影响汽车的运动状态,异常的载荷对道路、车辆和环境都会产生不良影响。准确估算车辆载荷对于道路交通管理、安全性、燃油经济性和维护至关重要。传统上,车辆载荷估算通常需要使用专用传感器或设备进行直接测量,这导致成本昂贵、使用复杂,且难以在实时情况下应用。而仅基于车辆动力学模型进行估算会因采集数据噪声、传感器误差、非线性系统而导致估算结果存在较大误差。通过神经网络训练消除噪声干扰的方法需要大量gpu算力,且无法对传感器间的非线性噪声精准降噪。
2、如现有技术中,申请号为201911392989.4,申请日为2019.12.30的中国专利申请《一种车辆载荷动态实时计算方法》建立整车动力学模型,引入深度神经网络模型并利用大数据降低噪声干扰,在云端gpu集群训练并边缘部署后,实现车载模块实时计算车辆载重数据的方法。缺点:需要大量云端算力,无法对传感器间的非线性噪声精准降噪,对未训练车型的准确性较差。
3、申请号为202210867195.4的中国专利申请《车辆载荷估算方法、设备和存储介质》提出结合了静态和动态载荷估算模型,以实现车辆载荷的准确估算,无需额外的压力称重传感器。缺点:仍需要胎压传感器、车身姿态传感器,且需静态模型提前估算载荷,适用范围受限。
4、申请号为202111421199.1的中国专利申请《车辆及其载荷分布的识别方法和识别装置》通过获取车辆实际车速和纵向加速度,确定纵向加速度传感器组件与水平面的夹角,从而无需其他传感器来识别车辆及其载荷分布的方法和装置。缺点:仍需要轮速传感器、车身姿态传感器,且该专利用于载荷已知情况下根据车况估算载荷分布。
5、申请号为202210648101.4的中国专利申请《车辆载荷计算方法、系统及高空作业平台》通过测量轮胎组件重力和支撑力,根据约束条件计算车轮支反力,实现准确获取车辆载荷数据和有效评估受力情况。缺点:需要额外的轮胎组件、力传感器,算法实时性稍弱。
6、申请号为202310024350.0的中国专利申请《一种基于智能优化算法的纯电动汽车载荷预估方法》通过车辆相邻状态的动力学平衡方程和数据分析方法确定特定行车状态,结合车辆信息调参实现高效载荷预测,解决传统方法复杂度和收敛速度问题。缺点:需要有加速或匀速的数据片段,因需要连续时间数据导致方法实时性稍弱,因忽略动力学中其他阻力变化导致方法准确性较差。
7、申请号为202310677216.0的中国专利申请《一种车辆载荷识别系统》提出一种包括状态监测器、校验系统和状态存储器的车辆载荷识别系统,状态监测器与车辆的bcm、esp、abs通过通信总线交互信息,用于监测和分析乘用车的静态变载、纵向动态载荷、横向动态载荷、车门逻辑和机器学习动态载荷,校验系统进行校准和校对,最终得到载荷判定值load,该系统可用于驾驶安全和胎压监测。缺点:需要较多额外传感器,回归算法的实时性稍弱。
8、申请号为202310038818.1的中国专利申请《一种车辆载荷实时监测系统和方法》涉及一种车辆载荷实时监测系统,包括数据采集模块用于实时检测车身相对车轮的高度和车速,控制模块基于这些信息生成至少一个车轮的实时载荷信息,以及载荷异常实时监测模块,当信息超出阈值时生成载荷异常信息。缺点:需额外安装特定的数据采集模块,未考虑路阻、风阻等影响因素,鲁棒性较差。
9、综上所述,目前技术上还包括以下缺点:
10、1、现有方法普遍需要增加额外传感器,部署难度和实时成本较大,适用范围受限。
11、2、部分方法对数据量和数据特征要求较高,导致算法收敛较慢,实时性较差,无法满足某些实时应用的需求。
12、3、现有方法未充分利用整个时间序列的信息,提供对状态的更精确估计,部分方法还未考虑外部因素影响,因此方法的准确性较差。
13、因此,需要开发一种可靠、准确且实时的方法来估算车辆载荷成为研究和应用的需求。
技术实现思路
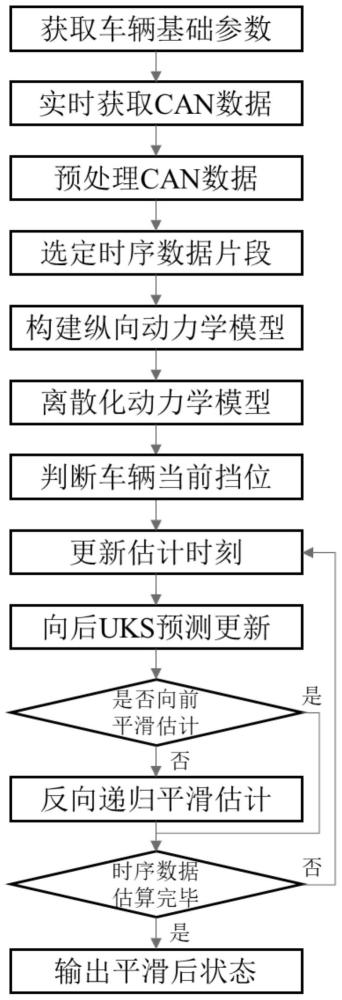
1、本发明的目的在于提供一种基于车载can数据的车辆载荷高精度估算方法,其特征在于,包括如下步骤:
2、s1:获取装配有can设备的车辆基础参数;
3、s2:实时获取车载的can数据;
4、s3:按照时间窗粒度预处理s2中车载can数据,清洗异常数据并进行筛选;
5、s4:构建车辆纵向动力学模型;
6、s5:基于向前欧拉算法,考虑各个传感器噪声,将车辆纵向动力学模型进行离散化处理;
7、s6:基于s1中获取的车辆基础参数,结合s3与处理后的车载can数据,判断车辆当前档位;
8、s7:选择s3中任意一个得到的车辆轨迹片段,基于无迹卡尔曼平滑器,考虑传感器的噪声扰动,向后估算车辆载荷;
9、s8:基于递归平滑估计从k时刻向前递归,利用k时刻的平滑后状态x(k)和协方差矩阵pk,以及k+1时刻的预测状态和状态估计协方差矩阵预测k+1时刻的状态x(k+1)和协方差矩阵pk+1;
10、s9:针对每个时刻,重复s7-s8,直至该轨迹片段所有时刻皆执行完毕,输出平滑后的状态估计,其中,的倒数为车辆载荷。
11、进一步地,s1中,车辆基础参数包括车型、发动机各档速比、车轮半径和车辆尺寸。
12、进一步地,s2中,车载的can数据包括车辆id信息、车辆经纬度、当前时间戳、车辆瞬时速度、发动机转速和发动机输出扭矩。
13、进一步地,s3具体为:将车辆id相同的数据进行匹配、将经纬度统一至wgs-84坐标系、设置估算时间窗粒度,按照时间窗粒度,划分为不同的数据集合并清洗异常数据,筛选时间窗内不含制动操作的车辆轨迹片段。
14、进一步地,时间窗粒度为5min。
15、进一步地,s4中,车辆纵向动力学模型表示为:
16、
17、其中,δ为旋转质量换算系数;v为车辆速度;t为时间;t为发动机输出扭矩;ig为主减速比;it为变速器档速比;η为传动效率;r为轮胎滚动半径;m为车辆载荷;ρ为空气密度;c为空气阻力系数;a为车辆迎风面积;μ为滚动阻力系数;g为重力加速度;α为道路坡度角。
18、进一步地,s5中,离散化处理后的车辆纵向动力学模型表示为:
19、
20、其中,ts为步长;ωt、ωv、ωm、ωα分别为t、v、m、α的扰动噪声,扰动为满足ωv~n(0,σ2)的高斯白噪声。
21、进一步地,s7具体包括如下步骤:
22、s71:设定初始状态向量初始观测向量z(0)=[v(0),t(0)]t、初始状态估计协方差矩阵p0、初始过程噪声协方差矩阵q0;
23、s72:根据k-1时刻的状态向量x(k-1),基于s5中离散的动力学模型f(x(k)),预测k时刻的状态向量
24、s73:更新k时刻的观测向量z(k),表示为:
25、
26、s74:求解k时刻的状态转移雅可比矩阵ak,表示为:
27、
28、s75:预测状态估计协方差矩阵表示为:
29、
30、s76:求解卡尔曼增益kk,表示为:
31、
32、s77:更新状态估计向量x(k),表示为:
33、
34、s78:更新协方差矩阵pk,表示为:
35、
36、s79:重复s72-s78,随时间推移实时更新状态估计向量x(k)和协方差矩阵pk。
37、进一步地,s8具体包括如下步骤:
38、s81:基于s77获得最后一个时刻k的状态估计向量x(k);
39、s82:基于s78获得k时刻的协方差矩阵pk;
40、s83:设定平滑因子pk|k和初始平滑状态xk|k,表示为:
41、
42、s84:计算k时刻的平滑增益gk,表示为:
43、
44、s85:更新平滑后的状态估计xk|k,表示为:
45、xk|k=xk|k+gk[xk+1|k-f(x(k))]
46、s86:更新平滑后的协方差估计pk|k,表示为:
47、
48、s87:从k=k+1时刻开始,重复s84至s86,逐步向前递推至k=1,得到整个时间序列上每个时刻的平滑状态估计xk|k和平滑协方差估计pk|k。
49、与现有技术相比,本发明的有益效果主要体现在:
50、1、本发明自动更新车载can数据并实时读取,通过分析海量数据实现了全面的数据综合利用,实现对车辆载荷实时估算,适用于各类快速应用场景,为迅速准确的估算提供技术支持。
51、2、本发明通过动态数据特征提取和无迹卡尔曼平滑器,充分利用整个时间序列的信息,考虑传感器参数的反向传播,实时校准车辆状态,自动估算车辆载荷,防止人工调整参数和后期维护产生误差,更具准确性。
52、3、本发明只需获取车辆的can数据,即可同时自动估计车辆状态,无需额外传感器、专业监测设备等硬件,无需大量计算资源,大幅降低部署和应用成本,为成本敏感领域带来经济有效解决方案。
本文地址:https://www.jishuxx.com/zhuanli/20240802/260171.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表