机械设备故障预测方法、系统、电子设备以及存储介质与流程
- 国知局
- 2024-08-05 11:55:13
本公开涉及机械设备剩余寿命预测,尤其涉及一种机械设备故障预测方法、系统、电子设备以及存储介质。
背景技术:
1、目前,随着工业4.0与智能制造的发展,预测性维护(predictive maintenance)技术在提升设备的维护质量,减少维护成本,降低设备运行风险等方面具有重要意义。预测性维护是phm(prognostics and health management,故障预测与健康管理)系统的重要目标,实现预测性维护的核心内容之一是对设备的rul(remaining useful life,剩余使用寿命)进行预测。可靠的剩余使用寿命预测可以为设备维护的决策提供有意义的信息,从而避免系统的严重故障。
2、随着传感器、存储等技术的发展,大数据背景使得基于数据驱动的故障预测方法备受关注。现有的基于数据驱动的故障预测方法主要分为基于统计模型与基于机器学习两大类,但是目前针对参数优化的多目标整个过程忽略大量的邻居信息,维护收敛性的同时搜索分布良好的最优解集是困难的。
3、然而,相关技术大部分基于数据驱动的故障预测方法仅限于对rul进行点预测,而未能考虑预测不确定性,因此得到的rul预测结果信息单一,无法有力支持后续健康管理或预测性维护的决策活动。
技术实现思路
1、提供该公开内容部分以便以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。该公开内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
2、本公开实施例提供了一种机械设备故障预测方法、系统、电子设备以及存储介质,解决了参数优化的多目标整个过程忽略大量的邻居信息,维护收敛性的同时搜索分布良好的最优解集是困难的问题,增加了目标的多样性同时维护解集的分布性。可以有效减少设备的停机时间与维护成本,提高设备运行效率与安全性,具有工业应用价值。
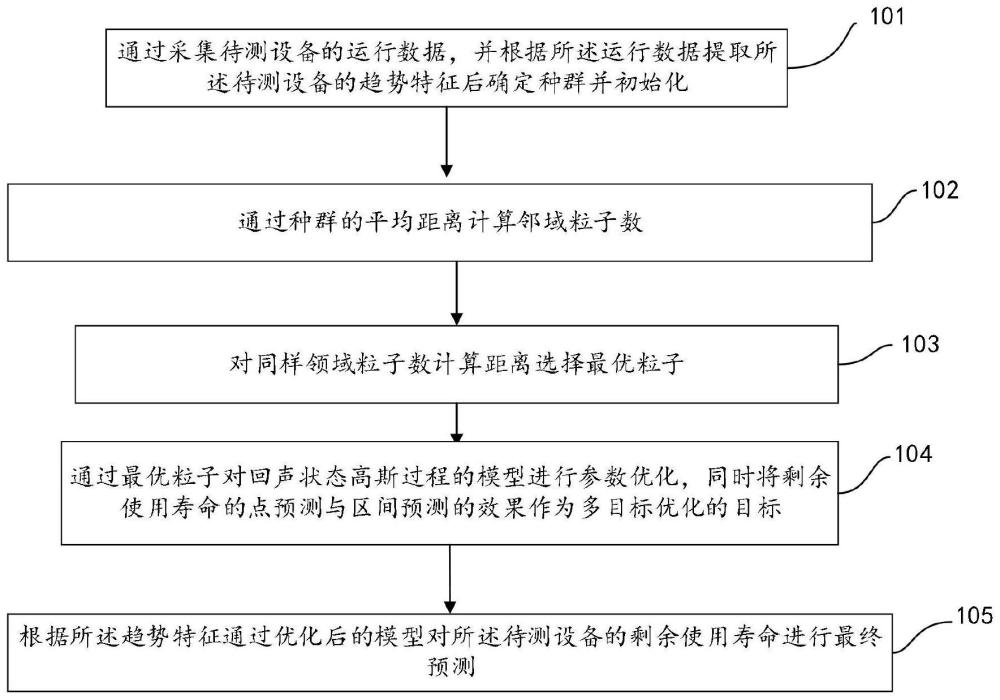
3、第一方面,本公开实施例提供了机械设备故障预测方法,包括:采集待测设备的运行数据,并根据所述运行数据提取所述待测设备的趋势特征后确定种群并初始化;通过种群的平均距离计算邻域粒子数;对同样领域粒子数计算距离选择最优粒子;通过最优粒子对回声状态高斯过程的模型进行参数优化,同时将剩余使用寿命的点预测与区间预测的效果作为多目标优化的目标;根据所述趋势特征通过优化后的模型对所述待测设备的剩余使用寿命进行最终预测。
4、结合第一方面的实施例,在一些实施例中,所述采集待测设备的运行数据,并根据所述运行数据提取所述待测设备的趋势特征后确定种群并初始化,包括:
5、获取多个传感器采集的所表示的多维特征数据,并根据统计指标选择以剔除冗余特征;
6、对每一维原始特征进行特征提取,设置时间窗口的长度为预设值,对于每个时间窗取平均值与差分值作为提取的特征,以得到所述待测设备的趋势特征;
7、假设种群含有t个目标函数,不失通用性可表示为
8、min{p(e),}=[p1(e),p2(e),…,pt(e)]
9、s.t.e∈gi
10、e=(e1,...,ej,...,ei)
11、其中,pt(e)为第t个目标函数,gi为i维决策空间,ej为在决策空间的第j个维度上连续取值,为最小值,为最大值;
12、初始化种群、外部档案rep及指标均设为0,初始化参数要包括,d、irep、pm、eubest、tv;
13、其中,d为最大迭代次数,irep为种群最大粒子数,pm为变异算子,tv为平均距离的缩放因子,eubest为种群全局最佳粒子,为惯性权重的递减率。
14、结合第一方面的实施例,在一些实施例中,所述通过种群的平均距离计算邻域粒子数,包括:
15、将最优解引入rep外部档案中;
16、当此时迭代次数小于最大迭代次数;
17、统计rep的粒子数i;
18、根据第t个目标值,将rep的粒子升序排序,得到索引数组rank[i],最大值和最小值分别为
19、计算种群在第t个目标的平均距离
20、
21、其中,i为种群的大小;
22、当运行条件为o≤i时,根据索引数组rank[o]遍历rep计算相邻粒子在第t个目标的差值的绝对值pxyw;
23、当pxyw在第t维度值大于h(pt),则两个粒子在第t个目标中互为邻域粒子;
24、o←o+1,判断o≤i是否成立,继续判断邻域空间;
25、当d≤d时,d←d+1,重新得到索引数组rank[i]并判断邻域空间;
26、历遍rep,统计粒子在邻域空间中本身之外的粒子数划分等级。
27、结合第一方面的实施例,在一些实施例中,对同样领域粒子数计算距离选择最优粒子,包括:
28、根据粒子数划分等级,将等级相同的粒子通过目标值排序,第o个粒子的与其相邻粒子距离为
29、
30、其中,eo为第o个粒子的位置,ho为第o个粒子的与其相邻粒子距离;
31、端点粒子i的拥挤距离与其相邻粒子距离为
32、
33、将所有粒子依据邻域粒子数排序后,等级最低的粒子优先被考虑作为全局最优解eubest,如果全局最优解不唯一,将选择距离最大的粒子;
34、更新粒子群的速度和位置
35、
36、其中,d为当前迭代次数,eo(d)为第d次迭代次数时第o个粒子位置,γo(d)为第d次迭代次数时第o个粒子的速度,eo(d+1)为第d+1次迭代次数时第o个粒子位置,γo(d+1)为第d+1次迭代次数时第o个粒子速度,eo,qbest为粒子o的个体最佳位置,eubest为种群最佳位置,g1、g2为[0,1]的随机数,z1、z2为加速常数;
37、在[0,1]中随机生成rand,当rand≤pm时,粒子发生位置突变,选择粒子历史最优解并添加rep中;
38、如果rep中的粒子数量超过上限irep,根据外部档案rep与上限值irep的差值确定循环删除的次数;
39、在每次过程中,将等级最高并且距离最小的粒子最先删除;
40、
41、其中,为权重的递减率,为第d次迭代的惯性权重,为第d+1次迭代的惯性权重;
42、
43、其中,d为最大迭代次数,d为已迭代次数,pm为变异算子;
44、d←d+1,返回判断前迭代次数是否大于最大迭代次数,循环最终选择最优粒子。
45、第二方面,本公开实施例提供了一种机械设备故障预测系统,包括:初始化单元,采集待测设备的运行数据,并根据所述运行数据提取所述待测设备的趋势特征后确定种群并初始化;粒子数计算单元,通过种群的平均距离计算邻域粒子数;最优粒子单元,对同样领域粒子数计算距离选择最优粒子;模型优化单元,通过最优粒子对回声状态高斯过程的模型进行参数优化,同时将剩余使用寿命的点预测与区间预测的效果作为多目标优化的目标;预测单元,根据所述趋势特征通过优化后的模型对所述待测设备的剩余使用寿命进行最终预测。
46、结合第二方面的实施例,在一些实施例中,所述初始化单元,采集待测设备的运行数据,并根据所述运行数据提取所述待测设备的趋势特征后确定种群并初始化,包括:
47、获取多个传感器采集的所表示的多维特征数据,并根据统计指标选择以剔除冗余特征;
48、对每一维原始特征进行特征提取,设置时间窗口的长度为预设值,对于每个时间窗取平均值与差分值作为提取的特征,以得到所述待测设备的趋势特征;
49、假设种群含有t个目标函数,不失通用性可表示为
50、min{p(e),}=[p1(e),p2(e),…,pt(e)]
51、s.t.e∈gi
52、e=(e1,...,ej,...,ei)
53、其中,pt(e)为第t个目标函数,gi为i维决策空间,ej为在决策空间的第j个维度上连续取值,为最小值,为最大值;
54、初始化种群、外部档案rep及指标均设为0,初始化参数要包括,d、irep、pm、eubest、tv;
55、其中,d为最大迭代次数,irep为种群最大粒子数,pm为变异算子,tv为平均距离的缩放因子,eubest为种群全局最佳粒子,为惯性权重的递减率。
56、结合第二方面的实施例,在一些实施例中,所述粒子数计算单元,通过种群的平均距离计算邻域粒子数,包括:
57、将最优解引入rep外部档案中;
58、当此时迭代次数小于最大迭代次数;
59、统计rep的粒子数i;
60、根据第t个目标值,将rep的粒子升序排序,得到索引数组rank[i],最大值和最小值分别为
61、计算种群在第t个目标的平均距离
62、
63、其中,i为种群的大小;
64、当运行条件为o≤i时,根据索引数组rank[o]遍历rep计算相邻粒子在第t个目标的差值的绝对值pxyw;
65、当pxyw在第t维度值大于h(pt),则两个粒子在第t个目标中互为邻域粒子;
66、o←o+1,判断o≤i是否成立,继续判断邻域空间;
67、当d≤d时,d←d+1,重新得到索引数组rank[i]并判断邻域空间;
68、历遍rep,统计粒子在邻域空间中本身之外的粒子数划分等级。
69、结合第二方面的实施例,在一些实施例中,所述最优粒子单元,对同样领域粒子数计算距离选择最优粒子,包括:
70、根据粒子数划分等级,将等级相同的粒子通过目标值排序,第o个粒子的与其相邻粒子距离为
71、
72、其中,eo为第o个粒子的位置,ho为第o个粒子的与其相邻粒子距离;
73、端点粒子i的拥挤距离与其相邻粒子距离为
74、
75、将所有粒子依据邻域粒子数排序后,等级最低的粒子优先被考虑作为全局最优解eubest,如果全局最优解不唯一,将选择距离最大的粒子;
76、更新粒子群的速度和位置
77、
78、其中,d为当前迭代次数,eo(d)为第d次迭代次数时第o个粒子位置,γo(d)为第d次迭代次数时第o个粒子的速度,eo(d+1)为第d+1次迭代次数时第o个粒子位置,γo(d+1)为第d+1次迭代次数时第o个粒子速度,eo,qbest为粒子o的个体最佳位置,eubest为种群最佳位置,g1、g2为[0,1]的随机数,z1、z2为加速常数;
79、在[0,1]中随机生成rand,当rand≤pm时,粒子发生位置突变,选择粒子历史最优解并添加rep中;
80、如果rep中的粒子数量超过上限irep,根据外部档案rep与上限值irep的差值确定循环删除的次数;
81、在每次过程中,将等级最高并且距离最小的粒子最先删除;
82、
83、其中,为权重的递减率,为第d次迭代的惯性权重,为第d+1次迭代的惯性权重;
84、
85、其中,d为最大迭代次数,d为已迭代次数,pm为变异算子;
86、d←d+1,返回判断前迭代次数是否大于最大迭代次数,循环最终选择最优粒子。
87、第三方面,本公开实施例提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当上述一个或多个程序被上述一个或多个处理器执行,使得上述一个或多个处理器实现如第一方面上述的机械设备故障预测方法。
88、第四方面,本公开实施例提供了一种计算机可读介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面上述的机械设备故障预测方法的步骤。
89、本发明有益效果:该方法,通过采集待测设备的运行数据,并根据所述运行数据提取所述待测设备的趋势特征后确定种群并初始化;通过种群的平均距离计算邻域粒子数;对同样领域粒子数计算距离选择最优粒子;通过最优粒子对回声状态高斯过程的模型进行参数优化,同时将剩余使用寿命的点预测与区间预测的效果作为多目标优化的目标;根据所述趋势特征通过优化后的模型对所述待测设备的剩余使用寿命进行最终预测。增加了目标的多样性同时维护解集的分布性。可以有效减少设备的停机时间与维护成本,提高设备运行效率与安全性,具有工业应用价值。
本文地址:https://www.jishuxx.com/zhuanli/20240802/260100.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表