用于层析粒子图像测速的三维粒子强度场重建方法及系统
- 国知局
- 2024-08-05 11:59:56
本发明属于层析粒子图像测速领域,更具体地,涉及一种用于层析粒子图像测速的三维粒子强度场重建方法及系统。
背景技术:
1、在流体动力学领域,高精度高分辨率的速度场测量是研究复杂流动现象的关键。层析粒子图像测速(tomographic particle image velocimetry,tomo-piv)因其非接触、全场测量、测量装置简洁、测量质量稳定、易于工程应用等优点而逐渐成为三维piv技术中最有希望实现高精度高空间分辨率的三维测量方法。
2、tomo-piv技术的测量原理如下:(1)将微纳米级尺度的示踪粒子播撒注入待测流场以跟随待测流场流动,即示踪粒子群的运动速度表征流场流动速度;(2)采用双/多脉冲激光照明技术在两个时刻分别照亮待测流场中的示踪粒子,与此同时,在同步器的控制下,通过多个相机从不同视角对流场中的粒子进行瞬时跨帧成像,得到相邻时刻下,不同视角的粒子图像;(3)使用代数迭代重建方法由不同视角下的粒子图像精确重建出流场中的三维粒子强度场;(4)运用互相关等速度估计方法,由两个相邻瞬时的三维粒子强度场计算出待测流场的瞬时三维速度场。由于播撒的大量示踪粒子弥散分布于待测流场中,所以能示踪待测流场中大量位置的流动状态,tomo-piv理论上有能实现高精度高空间分辨率的潜力。
3、tomo-piv在各种复杂流场中都已经实现了较为成功的应用,粒子三维重建作为tomo-piv中最具特色的部分,其重建精度和重建分辨率直接决定了后续速度场估计精度和速度场估计分辨率的上限。tomo-piv粒子三维重建目前存在两个主要难点,它们限制了tomo-piv的测量精度和测量分辨率。
4、第一个难点是粒子三维重建结果对标定精度的高敏感性,由于示踪粒子微小,直径通常只占几个体素,为了精确重建,校准的精度需要优于0.4体素,但这种精确度在常规标定中很难实现,目前的研究通过在常规标定结果之后做进一步的体自标定细化,提高标定精度,但是过程繁琐,实现复杂。在许多复杂流场应用中成像质量进一步下降,对粒子三维重建的精度提出了更大的挑战。
5、另一个难点是高粒子密度下的精确重建。粒子密度是tomo-piv中的一个重要参数,tomo-piv通过解析流场中示踪粒子的运动速度来表征流场对应位置的流速,示踪粒子越密集,流场测量的分辨率越高。而由于风洞和水洞中的光学通道有限,以及测量设备的成本和复杂性,tomo-piv只能使用很少的二维投影。因此,重建问题变得严重不适定,示踪粒子密度增加,会加剧不适定性,从少量的相机成像中精确估计三维空间中大量的示踪粒子强度场变得更加有挑战性。
6、由于重建问题的欠定性,现有的基于乘法代数迭代算法(mart,multiplicativealgebraic reconstruction technique)的粒子三维重建法获得的三维粒子强度场中存在大量的伪影,也称为鬼影粒子。它们随机出现在重建结果中的任意位置,从几何上解释,它是由于从少量的视线中推断粒子位置产生的多义性,从数学上解释,由于问题欠定,导致存在无数种可行解,mart算法筛选其中满足香农熵最大化的解,所得的解和实际结果存在差异。鬼影粒子的存在对后续的速度估计结果存在明显影响,有研究显示,大量鬼影粒子会导致对速度梯度的低估。随着粒子密度增加,重建结果中的鬼影粒子更多,重建质量更低,因此抑制mart重建结果中的鬼影粒子非常重要。
7、近年来,国内外许多学者多提出了mart的改进方法,它们提高了mart重建结果的精度以及可支持的粒子密度。sf-mart通过在mart每次迭代结果中使用高斯滤波来改善重建结果,该方法改善了重建结果中真实粒子的强度和比例,但是对鬼影粒子的抑制效果不明显。inte-mart根据鬼影粒子的概率分布规律,通过使用预先设计的修正系数来抑制鬼影粒子的强度,同时使用z方向的逆扩散修正粒子拉长的问题,该方法仅考虑了一个方向的拉长效,其他方向的粒子畸变问题仍需要进一步解决,且设计的修正系数所依据的鬼影粒子分布规律偏向于经验,还需要进一步的理论支撑。mte-mart使用鬼影粒子的时间不相干性质,通过结合多帧的三维粒子强度场信息消除鬼影粒子,但是由于鬼影粒子的轨迹通常能持续多个时间步长,所以需要大量的帧信息才有明显的效果,这对于仅使用双帧进行瞬时测量的情况来说,作用甚微。
8、综上,mart重建结果中的鬼影粒子对后续速度场计算存在较大干扰,现有研究对此进行了大量改进,但是仍然需要进一步的研究以提高重建精度,以及对高粒子密度下的重建能力。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种用于层析粒子图像测速的三维粒子强度场重建方法及系统,其目的在于,抑制基于mart重建三维粒子强度场时的鬼影粒子,提高重建精度。
2、为实现上述目的,按照本发明的第一方面,提出了一种用于层析粒子图像测速的三维粒子强度场重建方法,包括如下步骤:
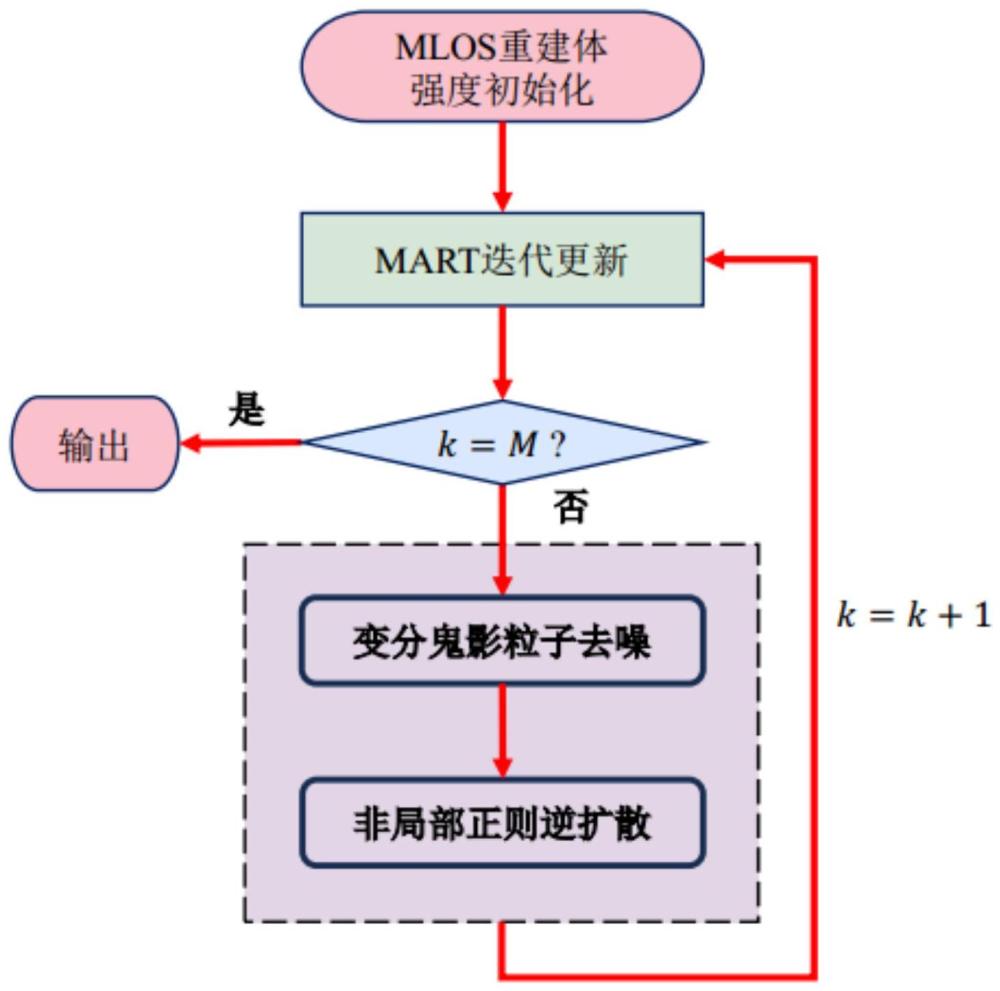
3、采用乘法代数迭代算法对二维粒子图像进行三维层析重建,得到三维粒子强度场;在重建过程中,对每次迭代得到的三维粒子强度场,通过变分鬼影粒子去噪模型对其进行去噪后,再进行下一次迭代;
4、所述变分鬼影粒子去噪模型为:
5、
6、其中,u为三维粒子强度场,u*为u的真值,||u-u*||1表示一范数约束;n为三维粒子强度场图像对应的维度,λ为惩罚参数;x,y,z表示笛卡尔坐标系中的三个方向。
7、作为进一步优选的,在重建过程中,通过变分鬼影粒子去噪模型对每次迭代得到的三维粒子强度场进行去噪后,再通过非局部正则化的逆扩散方程进行三维粒子强度场增强,然后进行下一次迭代。
8、作为进一步优选的,所述非局部正则化的逆扩散方程为:
9、
10、其中,u为三维粒子强度场,t为扩散时间,δ为拉普拉斯算子,θ为常数系数,r(u)为非局部约束项。
11、作为进一步优选的,所述非局部约束项r(u)具体为:
12、
13、其中,n(a)为正则化因子;h为滤波参数,gρ(t)为t时刻标准差为ρ的高斯核;a,b分别表示三维粒子强度图像中的两个点,ω为运算区域,u(b)为在点b处的三维粒子强度场强度值,σ为预设邻域值,u(b+σ)为点b附近的三维粒子强度场强度值,u(a+σ)为点a附近的三维粒子强度场强度值。
14、作为进一步优选的,采用原始-对偶混合梯度下降算法求解变分鬼影粒子去噪模型。
15、作为进一步优选的,采集二维粒子图像的方法为:在流场中播撒示踪粒子,示踪粒子被脉冲激光照亮,通过流场周围的多个相机获取不同角度的二维粒子图像。
16、作为进一步优选的,采用乘法代数迭代算法对获取的二维粒子图像进行三维层析重建时,共迭代5~10次。
17、按照本发明的第二方面,提供了一种用于层析粒子图像测速的三维粒子强度场重建系统,包括处理器,所述处理器用于执行上述用于层析粒子图像测速的三维粒子强度场重建方法。
18、按照本发明的第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述用于层析粒子图像测速的三维粒子强度场重建方法。
19、总体而言,通过本发明所构思的以上技术方案与现有技术相比,主要具备以下的技术优点:
20、1、本发明在mart迭代过程中,通过鬼影粒子的先验概率分布信息,构建全变分鬼影粒子去噪模型对鬼影粒子进行抑制,从而提高粒子三维重建结果的精度;本发明提高了在高粒子密度下的重建能力,有效弥补了现有方法无法抑制鬼影粒子以及重建得到的真实粒子强度受到损失的缺点,可为后续三维速度估计提供更加准确的数据支撑。
21、2、本发明结合待重建目标的非局部自相似特性,通过非局部正则化的逆扩散方程对迭代结果进行处理,可进一步抑制鬼影粒子强度和比例,提高真实粒子的强度和比例,并有效增强图像,提高重建结果的对比度,改进粒子形状。
22、3、本发明能改善重建粒子的形状畸变,具体通过对中间值的有效处理,为下一次迭代提供了良好的初值,引导了mart迭代过程向更精确的方向发展,同时也提高了重建算法的收敛速度。
本文地址:https://www.jishuxx.com/zhuanli/20240802/260533.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表