追踪地纹标线的自动建图方法、系统、介质及设备与流程
- 国知局
- 2024-08-05 11:59:31
本发明涉及地面纹理,特别涉及一种追踪地纹标线的自动建图方法、系统、介质及设备。
背景技术:
1、在目前行业中,地面纹理导航因导航精度高、一致性好而被广泛使用,在进行地纹导航建图时,往往需要在地面粘贴标线,使得修图变的便利,并且可以进一步提高精度。在进行建图时,目前行业中采取的普遍做法是手动控制agv自动导引车沿标线行走,这种做法费时费力,且由于车辆装配等问题,往往难以严格按照标线行走,因此在地纹标线建图时旺旺存在建图误差。
2、因此针对上述问题,需设计一种追踪地纹标线的自动建图方法方案,解决了人工手动控制时,agv难以严格按照地纹标线行驶的问题。
技术实现思路
1、本发明的提供一种追踪地纹标线的自动建图方法、系统、介质及设备,可解决了人工手动控制时,agv难以严格按照标线行驶的问题。
2、第一方面,提供一种追踪地纹标线的自动建图方法,包括以下步骤:
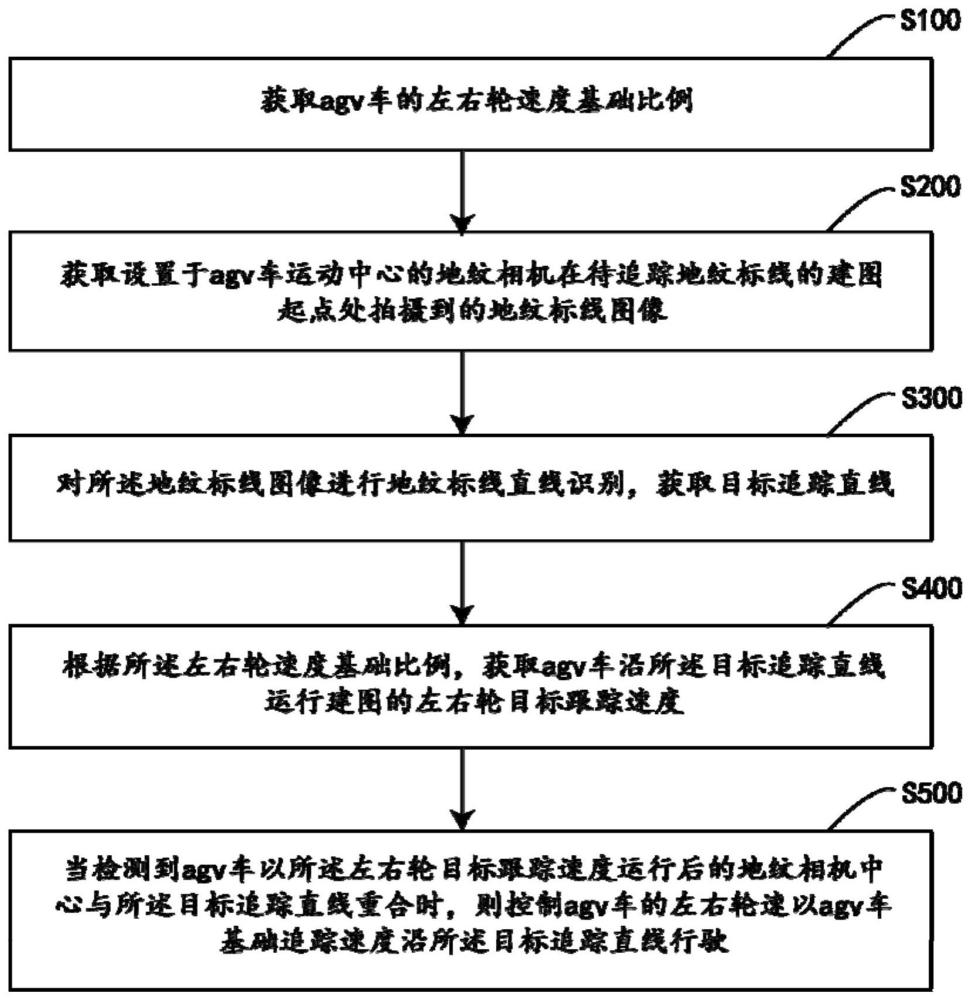
3、获取agv车的左右轮速度基础比例;
4、获取设置于agv车运动中心的地纹相机在待追踪地纹标线的建图起点处拍摄到的地纹标线图像;
5、对所述地纹标线图像进行地纹标线直线识别,获取目标追踪直线;
6、根据所述左右轮速度基础比例,获取agv车沿所述目标追踪直线运行建图的左右轮目标跟踪速度;
7、当检测到agv车以所述左右轮目标跟踪速度运行后的地纹相机中心与所述目标追踪直线重合时,则控制agv车的左右轮速以agv车基础追踪速度沿所述目标追踪直线行驶。
8、根据第一方面,在第一方面的第一种可能的实现方式中,所述“获取agv车的左右轮速度基础比例”步骤,具体包括以下步骤:
9、获取agv车以左右轮相同预设速度行驶预设距离时的平均角速度,并根据所述平均角速度、车辆轴距及左轮预设速度,得到左右轮速度基础比例。
10、根据第一方面的第一种可能的实现方式,在第一方面的第二种可能的实现方式中,所述“根据所述平均角速度、车辆轴距及左轮预设速度,得到左右轮速度基础比例”步骤,具体包括以下步骤:
11、根据所述平均角速度w、车辆轴距wd及左轮预设速度v’,得到左右轮速度基础比例k的计算公式如下:
12、k=1+(w*wd)/v’。
13、根据第一方面,在第一方面的第三种可能的实现方式中,所述“对所述地纹标线图像进行地纹标线直线识别,获取目标追踪直线”步骤,具体包括以下步骤:
14、基于opencv算法将所述地纹标线图像转换为灰度图,并提取所有所述灰度图中的轮廓线,基于霍夫直线检测算法检测所有所述轮廓线中的直线;
15、计算检测到的所有直线的起始点坐标之差及角度之差,当检测到两条直线之间的起始点坐标之差与角度之差均小于各自对应的预设阈值时,则视为同一条直线,并去除直线角度大于预设角度的直线,保留直线角度与agv车角度在预设偏差范围之内的直线,得到目标追踪直线。
16、根据第一方面,在第一方面的第四种可能的实现方式中,所述“根据所述左右轮速度基础比例,获取agv车沿所述目标追踪直线运行建图的左右轮目标跟踪速度”步骤,具体包括以下步骤:
17、计算地纹相机到所述目标追踪直线的距离,并根据所述距离及控制调整速度系数得到agv车的左右轮速度差;
18、根据所述左右轮速度差及agv车基础追踪速度,得到agv车沿所述目标追踪直线运行建图的左右轮目标跟踪速度。
19、根据第一方面的第四种可能的实现方式,在第一方面的第五种可能的实现方式中,所述地纹相机到所述目标追踪直线的距离d的计算公式如下:
20、d=(y1+y2)/2-y0;
21、式中,y1、y2分别为目标追踪直线的起始点y轴坐标值;y0为地纹相机画面中心y轴坐标值。
22、根据第一方面的第四种可能的实现方式,在第一方面的第六种可能的实现方式中,所述agv车沿所述目标追踪直线运行建图的左右轮目标跟踪速度的计算公式如下:
23、左轮目标跟踪速度vl=v+delta;
24、右轮目标跟踪速度vr=(v-delta)*k;
25、式中,delta为左右轮速度差;v为agv车基础追踪速度;k为左右轮速度基础比例。
26、第二方面,提供了一种追踪地纹标线的自动建图系统,包括:
27、比例获取模块,用于获取agv车的左右轮速度基础比例;
28、图像获取模块,用于获取设置于agv车运动中心的地纹相机在待追踪地纹标线的建图起点处拍摄到的地纹标线图像;
29、识别模块,与所述图像获取模块通信连接,用于对所述地纹标线图像进行地纹标线直线识别,获取目标追踪直线;
30、目标跟踪速度获取模块,与所述比例获取模块及所述识别模块通信连接,用于根据所述左右轮速度基础比例,获取agv车沿所述目标追踪直线运行建图的左右轮目标跟踪速度;以及,
31、控制行驶模块,与所述目标跟踪速度获取模块通信连接,用于当检测到agv车以所述左右轮目标跟踪速度运行后的地纹相机中心与所述目标追踪直线重合时,则控制agv车的左右轮速以agv车基础追踪速度沿所述目标追踪直线行驶。
32、与现有技术相比,本发明的优点如下:由于车辆因车轮磨损、安装误差、元器件误差等造成的车辆直线度不足,因此需要获取agv车的左右轮速度基础比例,可使车辆可以以较高的直线度行驶,减少识别过程中因车体本身造成的偏差;再通过agv底部地纹相机对地纹标线进行识别追踪,以得到使agv车沿目标追踪直线运行建图的左右轮目标跟踪速度,因此解决了人工手动控制时,agv车难以严格按照标线行驶的问题。
技术特征:1.一种追踪地纹标线的自动建图方法,其特征在于,包括以下步骤:
2.如权利要求1所述的追踪地纹标线的自动建图方法,其特征在于,所述“获取agv车的左右轮速度基础比例”步骤,具体包括以下步骤:
3.如权利要求2所述的追踪地纹标线的自动建图方法,其特征在于,所述“根据所述平均角速度、车辆轴距及左轮预设速度,得到左右轮速度基础比例”步骤,具体包括以下步骤:
4.如权利要求1所述的追踪地纹标线的自动建图方法,其特征在于,所述“对所述地纹标线图像进行地纹标线直线识别,获取目标追踪直线”步骤,具体包括以下步骤:
5.如权利要求1所述的追踪地纹标线的自动建图方法,其特征在于,所述“根据所述左右轮速度基础比例,获取agv车沿所述目标追踪直线运行建图的左右轮目标跟踪速度”步骤,具体包括以下步骤:
6.如权利要求5所述的追踪地纹标线的自动建图方法,其特征在于,所述地纹相机到所述目标追踪直线的距离d的计算公式如下:
7.如权利要求5所述的追踪地纹标线的自动建图方法,其特征在于,所述agv车沿所述目标追踪直线运行建图的左右轮目标跟踪速度的计算公式如下:
8.一种追踪地纹标线的自动建图系统,其特征在于,包括:
9.一种存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述追踪地纹标线的自动建图方法。
10.一种电子设备,包括存储介质、处理器以及存储在所述存储介质中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器运行所述计算机程序时实现如权利要求1至7中任一项所述追踪地纹标线的自动建图方法。
技术总结本发明公开了一种追踪地纹标线的自动建图方法、系统、介质及设备,其方法包括以下步骤:获取agv车的左右轮速度基础比例;获取设置于agv车运动中心的地纹相机在待追踪地纹标线的建图起点处拍摄到的地纹标线图像;对所述地纹标线图像进行地纹标线直线识别,获取目标追踪直线;根据所述左右轮速度基础比例,获取agv车沿所述目标追踪直线运行建图的左右轮目标跟踪速度;当检测到agv车以所述左右轮目标跟踪速度运行后的地纹相机中心与所述目标追踪直线重合时,则控制agv车的左右轮速以agv车基础追踪速度沿所述目标追踪直线行驶;因此可弥补人工操作对建图精度的影响,并极大减小人力消耗。技术研发人员:于航,李大伟受保护的技术使用者:法睿兰达科技(武汉)有限公司技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/260480.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表