一种临地安防十字形激光光斑自适应定位与测量方法
- 国知局
- 2024-08-05 12:06:31
本发明涉及视觉数据处理,具体涉及一种临地安防十字形激光光斑自适应定位与测量方法。
背景技术:
1、随着科学技术的不断发展,人们对测量精度的要求越来越高,而激光凭借其良好的方向性和较小的发散角,成为目前很多测量系统的辅助测量手段,被广泛应用于武器工程、航空航天和检测仪器中。光斑作为激光测量的重要组成部分,其定位和测量准确度直接影响到测量系统的性能和精度,因此,对光斑定位和测量算法的创新和优化具有十分重要的意义。
2、目前常用的光斑定位和测量算法大致可以分为两类,一类是灰度重心法,另一类是高斯拟合法。(1)灰度重心法是用光斑所形成图像的灰度分布来确定光斑的中心位置,通过计算各个像素的灰度值与其在图像中的位置之积的平均值,估计出光斑的中心位置。这是一种简单且迅速的测量方法,常用于实时监测。现有技术中公开了基于star1000探测器的光斑质心算法,对影响定位精度的因素进行了分析和仿真,证明了降低噪声,提高像元占空比,扩大有效光斑直径均可提高定位精度,但灰度重心法要求光斑比较规则,对于十字形光斑会产生较大误差。(2)高斯拟合法也要用到灰度图像,利用高斯数学模型对光斑的灰度分布进行拟合,通过得到的高斯分布函数计算出光斑的中心位置、形状参数等信息,它的精确度很高,稳定性也很好,对图像中的噪声具有一定的抑制能力。本领域技术人员利用光斑图像中的不饱和点对光斑进行高斯拟合,并以拟合函数的幅值点作为光斑中心的方法,避免了光斑中心区饱和引入的误差,充分利用了光斑的有效部分。但高斯拟合法易受图像的具体分布和采样数据样本大小的影响,在实际处理中往往需要对图像和数据样本大小进行具体分析。
技术实现思路
1、为了解决现有技术中如下技术问题:灰度重心法适用于某些特定的场景和光斑类型,对于十字形这种特殊形状的光斑检测误差较大;灰度重心法十分依赖图像中的灰度变化,在复杂情况下会准确度会受到影响;高斯拟合法计算复杂度高,不适合于实时系统,需要更多计算资源;高斯拟合法受到拟合过程中选择的参数影响,需要不断优化参数以适应不同场景。本发明为适应临地安防中十字形激光光斑的定位与测量任务需求,提出了一种临地安防十字形激光光斑自适应定位与测量方法,结合图像处理技术,特别是几何优化和形态学特征引导方法,能够在复杂光照、振动环境中实现对十字形光斑的精准定位和测量。
2、本发明第一个目的是提供一种临地安防十字形激光光斑自适应定位与测量方法,包括:
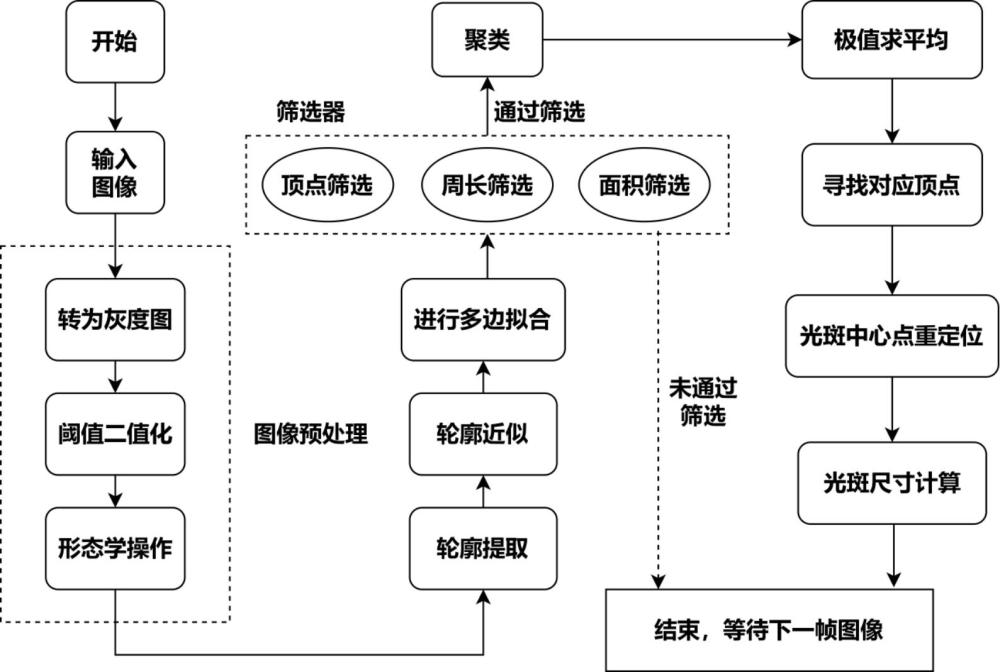
3、获取十字形光斑图像;根据十字形光斑图像进行二值化处理,获取二值图像;
4、从二值图像进行轮廓提取,获取多个闭合轮廓;对每个闭合轮廓进行轮廓近似获取多个轮廓;
5、根据十字形光斑的形态特征设置筛选器,通过筛选器从多个轮廓中筛选出目标轮廓;
6、获取目标轮廓的多个凸包点;采用k-means方法对凸包点进行聚类,获取多类凸包点集合;
7、根据极值平均法获取每类凸包点集合的中心点,将该中心点作为光斑顶点;
8、根据各个光斑顶点获取光斑中心;根据光斑中心进行自适应定位。
9、优选的,对每个闭合轮廓进行轮廓近似时,包括:
10、选择闭合轮廓上任意的两个相邻的点作为轮廓点并将它们之间的连线作为起始线段,计算闭合轮廓上这两点之间的点到此线段的距离并选出距离最远的点作为关键点;
11、若关键点到起始线段的距离高于阈值,则将该点加入轮廓点;
12、将起始线段分为其端点到关键点的两条线段,对这两条线段递归执行以上操作,直至所有线段到它们的关键点的距离均小于阈值,此时的轮廓点集合即为提取的轮廓。
13、优选的,根据十字形光斑的形态特征设置筛选器,所述筛选器包括三部分:
14、第一部分是顶点筛选,对轮廓顶点个数进行判断,若顶点个数不为8个,则排除此轮廓;
15、第二部分是面积筛选,计算轮廓中凸包面积和轮廓面积的比值进行筛选,若比值低于预设第一阈值,则排除此轮廓;
16、第三部分是周长筛选,计算轮廓中凸包周长和轮廓周长的比值进行筛选,若比值高于预设第二阈值,则排除此轮廓。
17、优选的,所述极值平均法计算公式如下:
18、
19、其中,第i个类的凸包点;
20、表示第i个类中所有凸包点的最小横坐标和最小纵坐标;
21、表示第i个类中所有凸包点的最大横坐标和最大纵坐标。
22、优选的,所述光斑中心是按照以下步骤获取:
23、根据各个光斑顶点计算光斑中心;
24、根据各个光斑顶点与计算所得的光斑中心的反正切角度;
25、根据所得的光斑中心的反正切角度获取相互对应的光斑顶点;
26、将相互对应的光斑顶点进行连线,作为十字形光斑轴的中线;
27、根据十字形光斑轴的中线的交点作为光斑中心。
28、优选的,还包括对十字形激光光斑的光斑长轴的长度和指定位置的光斑宽度进行测量,包括:
29、根据相互对应的光斑顶点之间的距离获取光斑长轴的长度;
30、对于指定位置的光斑宽度的计算,根据光斑宽度与光斑长轴相垂直的几何关系,确定经过指定位置的光斑宽度所在直线,并获取之间交点,记为初始化点;获取光斑宽度直线上初始化点的左、右两个相邻点,记为左、右停止点,通过确定左、右两个停止点最终位置获取指定位置的光斑宽度。
31、本发明第二个目的是提供一种临地安防十字形激光光斑自适应定位与测量系统,包括:
32、数据采集模块,用于获取十字形光斑图像;根据十字形光斑图像进行二值化处理,获取二值图像;
33、轮廓提取模块,用于从二值图像进行轮廓提取,获取多个闭合轮廓;对每个闭合轮廓进行轮廓近似获取多个轮廓;根据十字形光斑的形态特征设置筛选器,通过筛选器从多个轮廓中筛选出目标轮廓;
34、顶点识别模块,用于获取目标轮廓的多个凸包点;采用k-means方法对凸包点进行聚类,获取多类凸包点集合;根据极值平均法获取每类凸包点集合的中心点,将该中心点作为光斑顶点;
35、定位模块,用于根据各个光斑顶点获取光斑中心;根据光斑中心进行自适应定位。
36、本发明第三个目的是提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述方法的步骤。
37、本发明第四个目的是提供一种存储介质,其上存储有计算机程序,该计算机程序被运行时,用于执行上述方法的步骤。
38、本发明至少具有如下有益效果:
39、本发明提供了一种临地安防十字形激光光斑自适应定位与测量方法,针对十字形光斑进行精准定位。现有的光斑定位方法主要运用于形状规则的光斑,对十字形光斑定位误差大,本方法结合十字形光斑的形态特征,做专门的轮廓提取和多边拟合,并进行特征筛选,实现对十字形光斑的精准定位。
40、本发明提供的方法在复杂环境中表现良好。本发明采用形态特征对十字形光斑进行检测,避开了目前主流光斑定位方法常用的灰度图像,能有效排除其他干扰,在复杂环境中表现良好。本发明的参数采用自适应方法,结合目标特征自动进行变化,无需手动反复调试。
41、本发明提供的算法时间复杂度低。整套定位流程简单快速,多边拟合操作不需要高精度便能有效检测出十字形光斑的特征,严格限制住了迭代的次数,使得整体定位流程加快。在中央处理器为amd ryzen 7 3.2ghz、内存16g、ubuntu 20.04操作系统上,运行visual studio code软件进行测试,对于单个十字形光斑的定位加测量平均总耗时3ms。
42、本发明提供的方法定位测量精度高。采用本方法对十字形光斑进行重复成像定位测量测试(例如,典型值100次),测量结果的标准差估计值为0.2像素(图像分辨率10800×7450)。实验结果表明该算法是一种稳定性高、鲁棒性强的十字形光斑定位测量算法。
本文地址:https://www.jishuxx.com/zhuanli/20240802/261099.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表