一种急救呼吸机及双环控制方法
- 国知局
- 2024-08-05 12:18:55
本发明涉及医疗器械设计领域,特别是涉及一种急救呼吸机及双环控制方法。
背景技术:
1、呼吸机作为医疗设备,在预防和救治呼吸衰竭、慢性呼吸疾病方面发挥着不可替代的作用。由于急救呼吸机在实际应用中面临复杂而恶劣的环境,对其精准性和适应性提出了更高的要求,使得高精准性、高适应性的急救呼吸机成为当前研究的重要焦点。
2、在目前市场上,主要的通气控制方案包括传统的开环定频定量通气和单一气流量闭环反馈的pid控制。然而,由于急救呼吸机工作环境的复杂性和适应性要求,一些呼吸机在气路机构上进行了便携式简化设计,提高了呼吸机的便携性。然而,在高海拔地区工作时,室外大气压远低于标准大气压,导致传统方案的控制精度较低,而单一气流量反馈的pid控制方案虽然在通气控制精度方面能够满足紧急呼吸机设计要求,但其控制精度的降低限制了急救呼吸机的救治效果。
技术实现思路
1、本发明的目的是提供一种急救呼吸机及双环控制方法,可提高控制精度。
2、为实现上述目的,本发明提供了如下方案:
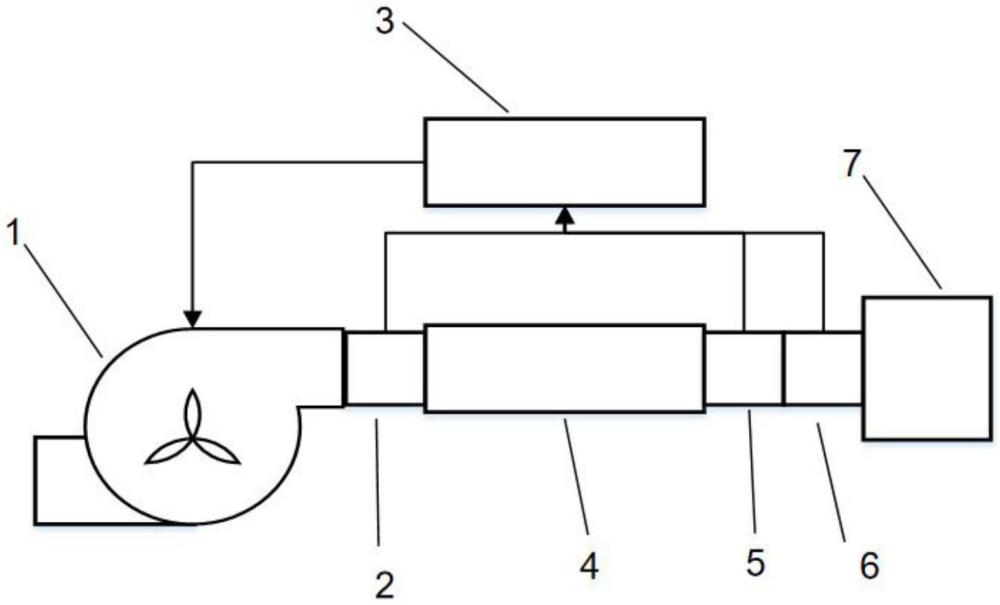
3、一种急救呼吸机,所述急救呼吸机包括:风机、流量传感器、控制电路模块、压差传感器、呼吸管路和面罩;
4、所述流量传感器设置在所述风机的出口处,且所述流量传感器设置在所述呼吸管路的一端;
5、所述面罩设置在所述呼吸管路的另一端;
6、在所述面罩和所述呼吸管路的另一端之间,设置有所述压差传感器;
7、所述风机、所述流量传感器和所述压差传感器均与所述控制电路模块连接;
8、所述流量传感器用于采集所述风机输出的当前时刻的气流速值;
9、所述压差传感器用于采集所述面罩处当前时刻的潮气量值;
10、所述控制电路模块,用于:
11、根据当前时刻的潮气量值和当前时刻的目标潮气量值,确定当前时刻的潮气量偏差;
12、根据当前时刻的潮气量偏差,采用外环pid运算进行逻辑控制,确定下一时刻的目标气流速值;
13、根据当前时刻的气流速值和当前时刻的目标气流速值,确定当前时刻的气流速偏差;
14、根据当前时刻的气流速偏差,采用内环pid运算进行逻辑控制,确定下一时刻的目标风机转速值;
15、根据下一时刻的目标风机转速值对风机的转速进行调整,得到下一时刻的运行数据;下一时刻的运行数据包括:下一时刻的气流速值、下一时刻的潮气量值和下一时刻的输出气压值。
16、可选地,所述急救呼吸机还包括:超压监测器;
17、所述超压监测器设置在所述面罩和所述呼吸管路的另一端之间,且与所述压差传感器相接;
18、所述超压监测器还与所述控制电路模块连接;
19、所述超压监测器用于采集所述面罩处当前时刻的输出气压值;
20、所述控制电路模块,还用于:
21、根据当前时刻的输出气压值与设定阈值进行比较;所述设定阈值包括:超压阈值和急停阈值;所述超压阈值小于所述急停阈值;
22、若当前时刻的输出气压值大于所述急停阈值,则控制风机进行急停处理;
23、若当前时刻的输出气压值大于所述超压阈值,但是小于等于所述急停阈值,则采用均值法进行异常统计以及平均值计算,并根据计算后的数据与设定阈值进行比较。
24、可选地,所述超压监测器为气压传感器。
25、可选地,所述流量传感器和所述压差传感器的采样率均为100hz。
26、可选地,所述气压传感器的采样率为50hz。
27、可选地,所述控制电路模块包括:主控芯片和驱动电路子模块;
28、所述主控芯片分别与所述流量传感器、所述压差传感器和所述超压监测器连接;
29、所述驱动电路字模块与所述风机连接。
30、一种急救呼吸机的双环控制方法,所述方法采用上述所述的急救呼吸机实现;所述方法包括:
31、获取当前时刻的运行数据;所述运行数据包括:气流速值、潮气量值和输出气压值;
32、根据当前时刻的潮气量值和当前时刻的目标潮气量值,确定当前时刻的潮气量偏差;
33、根据当前时刻的潮气量偏差,采用外环pid运算进行逻辑控制,确定下一时刻的目标气流速值;
34、根据当前时刻的气流速值和当前时刻的目标气流速值,确定当前时刻的气流速偏差;
35、根据当前时刻的气流速偏差,采用内环pid运算进行逻辑控制,确定下一时刻的目标风机转速值;
36、根据下一时刻的目标风机转速值对风机的转速进行调整,得到下一时刻的运行数据。
37、可选地,所述方法还包括:
38、根据当前时刻的输出气压值与设定阈值进行比较;所述设定阈值包括:超压阈值和急停阈值;所述超压阈值小于所述急停阈值;
39、若当前时刻的输出气压值大于所述急停阈值,则控制风机进行急停处理;
40、若当前时刻的输出气压值大于所述超压阈值,但是小于等于所述急停阈值,则采用均值法进行异常统计以及平均值计算,并根据计算后的数据与设定阈值进行比较。
41、根据本发明提供的具体实施例,本发明公开了以下技术效果:
42、本发明公开一种急救呼吸机及双环控制方法,通过流量传感器采集当前时刻的气流速值;压差传感器采集当前时刻的潮气量值;控制电路模块根据当前时刻的潮气量值和当前时刻的目标潮气量值,确定当前时刻的潮气量偏差,采用外环pid运算进行逻辑控制,确定下一时刻的目标气流速值;根据当前时刻的气流速值和当前时刻的目标气流速值,确定当前时刻的气流速偏差,采用内环pid运算进行逻辑控制,确定下一时刻的目标风机转速值;根据下一时刻的目标风机转速值对风机的转速进行调整,得到下一时刻的运行数据;由此提高控制精度。
技术特征:1.一种急救呼吸机,其特征在于,所述急救呼吸机包括:风机、流量传感器、控制电路模块、压差传感器、呼吸管路和面罩;
2.根据权利要求1所述的急救呼吸机,其特征在于,所述急救呼吸机还包括:超压监测器;
3.根据权利要求2所述的急救呼吸机,其特征在于,所述超压监测器为气压传感器。
4.根据权利要求1所述的急救呼吸机,其特征在于,所述流量传感器和所述压差传感器的采样率均为100hz。
5.根据权利要求3所述的急救呼吸机,其特征在于,所述气压传感器的采样率为50hz。
6.根据权利要求2所述的急救呼吸机,其特征在于,所述控制电路模块包括:主控芯片和驱动电路子模块;
7.一种急救呼吸机的双环控制方法,其特征在于,所述方法采用权利要求1-6中任意一项所述的急救呼吸机实现;所述方法包括:
8.根据权利要求7所述的急救呼吸机的双环控制方法,其特征在于,所述方法还包括:
技术总结本发明公开一种急救呼吸机及双环控制方法,涉及医疗器械设计领域;流量传感器采集当前时刻的气流速值;压差传感器采集当前时刻的潮气量值;控制电路模块根据当前时刻的潮气量值和当前时刻的目标潮气量值,确定当前时刻的潮气量偏差,采用外环PID运算进行逻辑控制,确定下一时刻的目标气流速值;根据当前时刻的气流速值和当前时刻的目标气流速值,确定当前时刻的气流速偏差,采用内环PID运算进行逻辑控制,确定下一时刻的目标风机转速值;根据下一时刻的目标风机转速值对风机的转速进行调整,得到下一时刻的运行数据;本发明能够提高控制精度。技术研发人员:王慧泉,魏志鹏,陈国盛,李城钰,赵喆受保护的技术使用者:天津工业大学技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/262115.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。