一种喷涂机器人故障诊断方法及系统与流程
- 国知局
- 2024-08-08 16:54:38
本发明涉及汽车喷涂生产线故障检测,更具体的说是涉及一种喷涂机器人故障诊断方法及系统。
背景技术:
1、汽车涂装生产线是汽车生产中焊接、冲压、涂装、动力总成四大部分的重要环节,喷涂机器人则是涂装生产线的核心设备之一。对喷涂机器人的故障进行快速准确地检测并排出故障,对保证涂装生产线的稳定运行以及保证汽车涂装工艺的可靠具有重要意义。
2、喷涂机器人通常具有多个活动的关节,从而实现多自由度的运动,灵活地进行喷涂作业,由于长时间的使用磨损消耗、电气老化等,经常发生机械故障和伺服电机故障。现有的喷涂机器人故障检测通常通过在机器人上设置多种传感器采集喷涂机器人的轴承温度、电机温度、振动等信号,通过对信号进行分解和特征提取,利用统计方法建立甄别模型或者算法,进行设备故障和异常状态识别。这种方法虽然能够监测机器人故障,但是监测设备需要对喷涂机器人设置多种传感器,对于已有的喷涂机器人改造难度大,传感器数量众多成本高昂,并且,由于传感器数量众多,容易因传感器故障频繁出现误警情况,影响喷涂生产线的正常工作。
3、因此,如何提出一种无需布置大量传感器,能够直接应用于现有喷涂生产线的喷涂机器人诊断方法是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种喷涂机器人故障诊断方法及系统,基于图像识别技术的运动检测和伺服电机馈电数据,利用故障诊断神经网络进行喷涂机器人故障诊断。
2、为了实现上述目的,本发明提供如下技术方案:
3、本发明公开了一种喷涂机器人故障诊断方法,具体步骤如下:
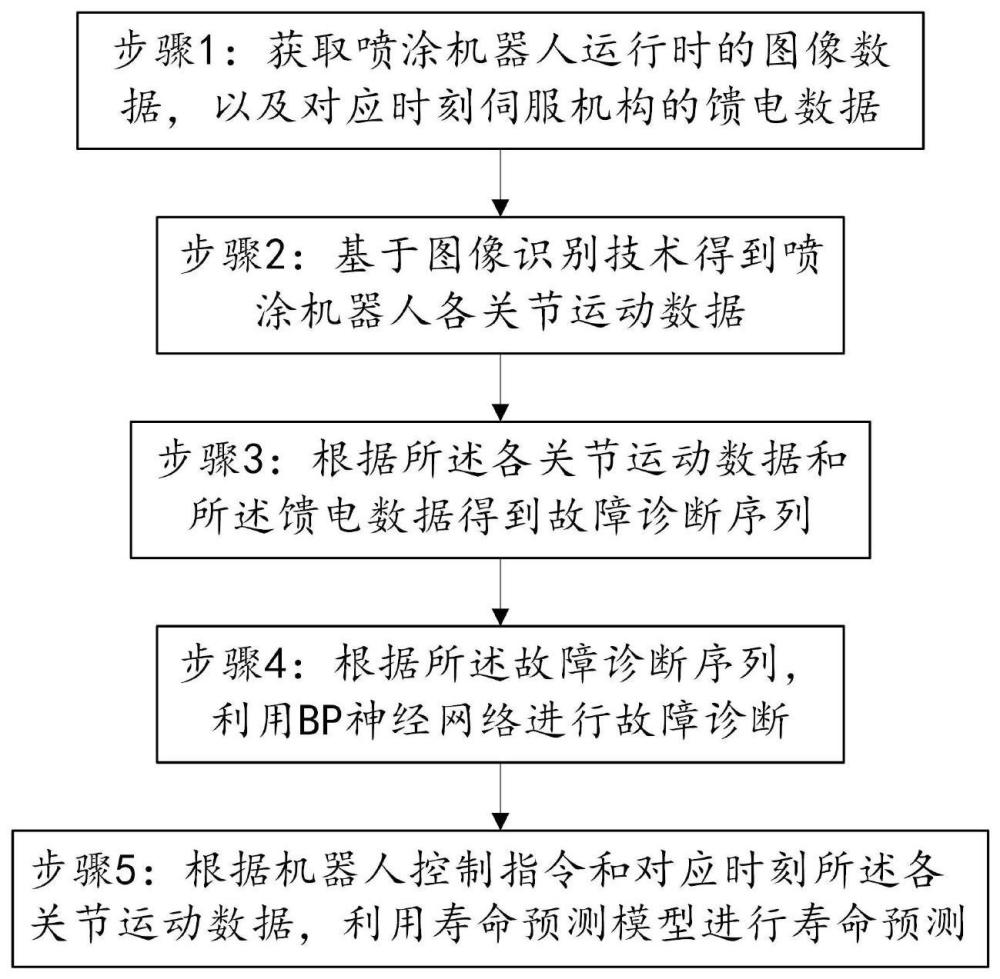
4、步骤1:获取喷涂机器人运行时的图像数据,以及对应时刻伺服机构的馈电数据;
5、步骤2:基于图像识别技术得到喷涂机器人各关节运动数据;
6、步骤3:根据所述各关节运动数据和所述馈电数据得到故障诊断序列;
7、步骤4:根据所述故障诊断序列,利用bp神经网络进行故障诊断;
8、步骤5:根据机器人控制指令和对应时刻所述各关节运动数据,利用寿命预测模型进行寿命预测。
9、进一步的,所述步骤1包括:在喷涂机器人拍摄背景处设置荧光定位点;通过2d相机实时拍摄喷涂机器人运动视频并分帧,为每一帧图像添加时间信息得到2d图像;通过3d结构光相机实时拍摄喷涂机器人运动视频并分帧,为每一帧图像添加时间信息得到3d结构光图像;根据所述时间信息,记录各时刻喷涂机器人各关节驱动机构的馈电电压、馈电电流。
10、进一步的,所述步骤2包括以下步骤:
11、步骤2.1:根据所述2d图像和所述3d结构光图像,确定喷涂机器人各时刻关节和机械臂的空间坐标信息;
12、步骤2.2:根据各时刻关节的所述空间坐标信息拟合关节运动轨迹,并计算各关节各时刻的移动速度和加速度;
13、步骤2.3:根据各时刻关节邻接机械臂的空间坐标信息,计算各时刻关节转动角度,并拟合关节转动角度曲线,进而计算各关节各时刻的转动角速度和角加速度。
14、进一步的,所述步骤2.1包括:
15、步骤2.1.1:根据所述2d图像和所述3d结构光图像中的荧光定位点,建立所述2d图像中各像素与3d结构光图像中各像素的对应关系矩阵;
16、步骤2.1.2:对3d结构光图像进行三维解析,得到各像素的三维坐标数据;
17、步骤2.1.3:利用卷积神经网络模型对所述2d图像进行识别,得到喷涂机器人关节和机械臂的轮廓像素;
18、步骤2.1.4:根据所述对应关系矩阵,赋予步骤2.1.3中轮廓像素三维坐标数据,得到所述空间坐标信息。
19、进一步的,所述步骤3中,以任意时刻任意关节的移动速度和加速度、角速度和角加速度、启动延迟、停止延迟,以及伺服机构的馈电电压、馈电电流为一个数据单元,同一关节的各数据单元按时间顺序排列,并以喷涂机器人运动启动和停止时刻确定时间起始点和结束点,得到各关节的故障诊断序列。
20、进一步的,步骤4中,所述利用bp神经网络进行故障诊断,具体包括:
21、步骤4.1:采集喷涂机器人在正常工作时和发生不同故障时的图像数据和馈电数据;
22、步骤4.2:根据所述图像数据,利用所述图像识别技术,识别喷涂机器人各关节运动数据,并进行数据处理得到喷涂机器人的故障诊断序列和对应的故障类型作为样本数据,进一步得到训练集和验证集;
23、步骤4.3:构建bp神经网络模型,并利用所述训练集进行自监督学习;
24、步骤4.4:利用所述验证集验证所述bp神经网络模型故障识别准确率,准确率达到阈值后得到训练好的bp神经网络模型;
25、步骤4.5:利用训练好的bp神经网络模型对步骤3得到的故障诊断序列进行识别,得到故障诊断结果。
26、进一步的,所述步骤5包括:
27、步骤5.1:通过机器人当前控制指令确定各关节执行指令时的理论启动和停止位置;
28、步骤5.2:基于所述空间坐标信息确定喷涂机器人各关节启动和停止的摆动幅度,以及启动和停止的摆动频率,并根据所述理论启动和停止位置确定各关节启动漂移值和停止漂移值;
29、步骤5.3:根据所述启动和停止的摆动幅度、所述启动和停止的摆动频率、所述启动漂移值、所述停止漂移值得到预测向量,利用寿命预测模型得到当前控制指令的寿命预测范围值;
30、步骤5.4:重复步骤5.1-5.3,得到基于设定数量的控制指令对应的寿命预测范围值,求平均得到最终寿命预测范围值。
31、进一步的,所述步骤5.3具体包括:
32、获取设定数量的喷涂机器人全寿命的关节历史特征数据,所述关节历史特征数据包括:不同时间点的喷涂机器人的关节启动和停止的摆动幅度、启动和停止的摆动频率、启动漂移值、停止漂移值;
33、根据喷涂机器人全寿命周期的不同阶段,将所述关节历史特征数据划分为多个集合,计算各集合内启动和停止的摆动幅度、启动和停止的摆动频率、启动漂移值、停止漂移值的代表值,得到各集合的中心向量;
34、计算所述预测向量和各集合中心向量的距离,选取距离最近的集合的时间端点作为当前时刻的寿命预测范围值。
35、本发明还公开了一种喷涂机器人故障诊断系统,包括:
36、数据获取模块:获取喷涂机器人运行时的图像数据,以及对应时刻伺服机构的馈电数据;
37、图像识别模块:基于图像识别技术得到喷涂机器人各关节运动数据;
38、数据处理模块:根据所述各关节运动数据和所述馈电数据得到故障诊断序列;
39、故障诊断模块:根据所述故障诊断序,利用bp神经网络进行故障诊断;
40、寿命预测模块:根据所述各关节运动数据,利用寿命预测模型进行寿命预测。
41、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种喷涂机器人故障诊断方法及系统,通过2d和3d相机采集喷涂机器人图像数据,利用图像识别技术即可实时准确地识别喷涂机器人的运动信息,从而根据机器人运动信息与驱动伺服机构的馈电信息,利用神经网络模型判及时判断喷涂机器人故障,无需大量传感器和监测设备,减少了因传感器故障造成的误警;还能够基于喷涂机器人运行时的运动轨迹,综合判断喷涂机器人的寿命;并且本发明故障诊断和寿命预测无需对现有的喷涂生产线和喷涂机器人进行大规模改造,成本低廉易于部署。
本文地址:https://www.jishuxx.com/zhuanli/20240808/271140.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表