基于网格化的停车区与充电车的自动匹配方法及装置与流程
- 国知局
- 2024-08-08 16:55:19
本发明涉及计算机,尤其是涉及一种基于网格化的停车区与充电车的自动匹配方法及装置。
背景技术:
1、现有的停车场中会安装多个充电桩,在车辆需要充电时,车主可以使用充电桩进行充电。
2、但是采用该方式,充电桩的位置固定,只有几个固定的位置可以充电,为车辆充电十分不方便。
技术实现思路
1、本发明提供一种基于网格化的停车区与充电车的自动匹配方法及装置,可以更加方便的为车辆充电。
2、为了解决上述技术问题,本发明是这样实现的:
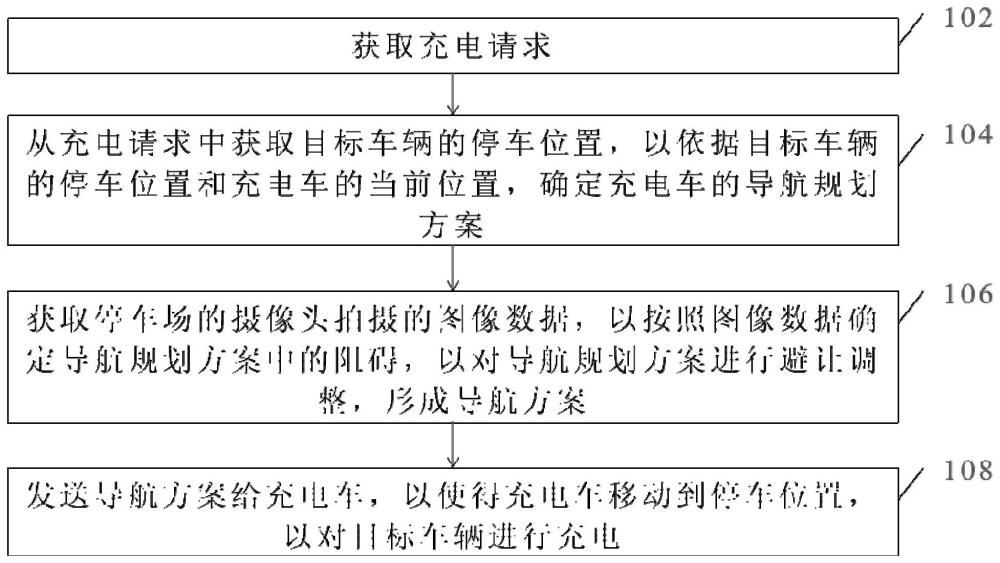
3、第一方面,本申请提供了一种基于网格化的停车区与充电车的自动匹配方法,所述方法包括:获取充电请求,所述充电请求为用户扫描停车场内与待充电的目标车辆的停车位置对应的二维码后获得,目标车辆的停车位置为停车场内按照网格化的方式预先划分的停车区;从充电请求中获取目标车辆的停车位置,以依据目标车辆的停车位置和充电车的当前位置,确定充电车的导航规划方案;获取停车场的摄像头拍摄的图像数据,以按照图像数据确定导航规划方案中的阻碍,以对导航规划方案进行避让调整,形成导航方案;发送导航方案给充电车,以使得充电车移动到停车位置,以对目标车辆进行充电。
4、优选的,所述从充电请求中获取目标车辆的停车位置,以依据目标车辆的停车位置和充电车的当前位置,确定充电车的导航规划方案,包括:从充电请求中获取目标车辆的停车位置,并获取停车位置的停车视频数据;依据停车视频数据,确定目标车辆在停车位置的朝向信息,以确定目标车辆的充电位置;依据目标车辆的充电位置和充电车的当前位置,确定充电车的导航规划方案。
5、优选的,所述依据停车视频数据,确定目标车辆在停车位置的朝向信息,包括:依据停车视频数据,确定目标车辆的运动轨迹;依据目标车辆的运动轨迹,确定目标车辆在停车位置的朝向信息。
6、优选的,所述停车场内设置有导航线,导航规划方案包括导航线与充电车之间的位置关系,导航线与充电车之间的位置关系包括充电车中部与导航线对应、充电车左侧与导航线对应、充电车右侧与导航线对应;所述对导航规划方案进行避让调整,形成导航方案,包括:对导航规划方案中导航线与充电车之间的位置关系进行调整。
7、优选的,所述充电车上设置有导航摄像头,所述充电车内设置有对照图像,所述对照图像包括第一图像、第二图像和第三图像,所述第一图像为充电车中部与导航线对应时的图像,所述第二图像为充电车左侧与导航线对应时的图像,所述第三图像为充电车右侧与导航线对应时的图像;充电车在基于导航线行驶过程中,用于:通过导航摄像头获取行驶图像,并获取导航线在行驶图像中的图像位置;基于导航线在行驶图像中的图像位置图像位置与导航线在对照图像中的对照位置进行行驶。
8、优选的,所述方法还包括:下发第四图像给充电车,以使得充电车按照第四图像进行行驶;其中,所述第四图像为充电车避让导航线上的阻碍时的图像,第四图像包括导航线以及障碍物,第四图像基于停车场的多个摄像头的图像数据进行三维建模后生成。
9、优选的,充电车上设置有定位模块,所述定位模块用于确定充电车的第一位置,所述方法还包括:获取停车场的摄像头拍摄的图像数据,并基于图像数据确定充电车的第二位置;下发第二位置给充电车,以使得充电车依据第一位置和第二位置确定充电车的当前位置。
10、优选的,充电车周围设置有多个距离传感器;所述充电车用于:基于距离传感器获取充电车周围物体的距离信息;在依据距离信息确定周围物体距离充电车过近时,充电车停止行动并上传重新规划路径请求;接收重新规划的导航方案,并重新行驶。
11、第二方面,本申请提供了一种基于网格化的停车区与充电车的自动匹配装置,所述装置包括:充电请求获取模块,用于获取充电请求,所述充电请求为用户扫描停车场内与待充电的目标车辆的停车位置对应的二维码后获得,目标车辆的停车位置为停车场内按照网格化的方式预先划分的停车区;导航规划生成模块,用于从充电请求中获取目标车辆的停车位置,以依据目标车辆的停车位置和充电车的当前位置,确定充电车的导航规划方案;导航方案生成模块,用于获取停车场的摄像头拍摄的图像数据,以按照图像数据确定导航规划方案中的阻碍,以对导航规划方案进行避让调整,形成导航方案;导航方案下发模块,用于发送导航方案给充电车,以使得充电车移动到停车位置,以对目标车辆进行充电。
12、第三方面,本申请提供了一种电子设备,包括:存储器和至少一个处理器;所述存储器用于存储计算机执行指令;所述至少一个处理器用于执行所述存储器中存储的计算机执行指令,使得所述至少一个处理器执行如第一方面所述的方法。
13、第四方面,本申请提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,该计算机程序被处理器执行时实现如第一方面所述的方法。
14、本申请提供了一种基于网格化的停车区与充电车的自动匹配方法,所述方法包括:获取充电请求,所述充电请求为用户扫描停车场内与待充电的目标车辆的停车位置对应的二维码后获得,目标车辆的停车位置为停车场内按照网格化的方式预先划分的停车区;从充电请求中获取目标车辆的停车位置,以依据目标车辆的停车位置和充电车的当前位置,确定充电车的导航规划方案;获取停车场的摄像头拍摄的图像数据,以按照图像数据确定导航规划方案中的阻碍,以对导航规划方案进行避让调整,形成导航方案;发送导航方案给充电车,以使得充电车移动到停车位置,以对目标车辆进行充电。
15、本申请可以应用在停车场内为车辆进行充电的场景中,本方案可以在停车场划分出网格化的停车区,并设置充电车,待充电的车辆停在网格内的停车区内发起充电请求,在车辆需要充电时,可以为充电车导航,使得充电车到达待充电的车辆附近,为车辆进行充电。本方案使采用非固定的充电车为车辆进行充电,可以更方便的为车辆进行充电。具体来说,本申请可以在停车场内网格化的停车区设置相应的二维码,用户在将车辆停到停车区之后,扫描对应的二维码生成充电请求。之后,可以从充电请求中获取目标车辆的停车位置,以依据目标车辆的停车位置和充电车的当前位置,确定充电车的导航规划方案;确定导航规划方案之后,由于导航路径上可能有其他车辆停车不规范或者有其他障碍物的阻碍,若是按照导航规划方案进行行驶可能会被阻碍,因此,本方案可以获取停车场的摄像头拍摄的图像数据,以按照图像数据确定导航规划方案中的阻碍,以对导航规划方案进行避让调整,形成导航方案;之后,发送导航方案给充电车,以使得充电车移动到停车位置,以对目标车辆进行充电。需要说明的是,本方案中充电车的自动导航是在停车场内的封闭区域内进行导航。
技术特征:1.一种基于网格化的停车区与充电车的自动匹配方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述从充电请求中获取目标车辆的停车位置,以依据目标车辆的停车位置和充电车的当前位置,确定充电车的导航规划方案,包括:
3.根据权利要求2所述的方法,其特征在于,所述依据停车视频数据,确定目标车辆在停车位置的朝向信息,包括:
4.根据权利要求3所述的方法,其特征在于,所述停车场内设置有导航线,导航规划方案包括导航线与充电车之间的位置关系,导航线与充电车之间的位置关系包括充电车中部与导航线对应、充电车左侧与导航线对应、充电车右侧与导航线对应;
5.根据权利要求4所述的方法,其特征在于,所述充电车上设置有导航摄像头,所述充电车内设置有对照图像,所述对照图像包括第一图像、第二图像和第三图像,所述第一图像为充电车中部与导航线对应时的图像,所述第二图像为充电车左侧与导航线对应时的图像,所述第三图像为充电车右侧与导航线对应时的图像;
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,充电车上设置有定位模块,所述定位模块用于确定充电车的第一位置,所述方法还包括:
8.根据权利要求7所述的方法,其特征在于,充电车周围设置有多个距离传感器;所述充电车用于:
9.一种基于网格化的停车区与充电车的自动匹配装置,其特征在于,所述装置包括:
10.一种电子设备,其特征在于,包括:存储器和至少一个处理器;
技术总结本发明公开了一种基于网格化的停车区与充电车的自动匹配方法及装置,所述方法包括:获取充电请求,所述充电请求为用户扫描停车场内与待充电的目标车辆的停车位置对应的二维码后获得;从充电请求中获取目标车辆的停车位置,以依据目标车辆的停车位置和充电车的当前位置,确定充电车的导航规划方案;获取停车场的摄像头拍摄的图像数据,以按照图像数据确定导航规划方案中的阻碍,以对导航规划方案进行避让调整,形成导航方案;发送导航方案给充电车,以使得充电车移动到停车位置,以对目标车辆进行充电。本方案使采用非固定的充电车为车辆进行充电,可以更方便的为车辆进行充电。技术研发人员:罗豫韦华受保护的技术使用者:托尔动力(北京)智能科技有限公司技术研发日:技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/271210.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表