一种适用于时变量测噪声的组合导航数据融合方法
- 国知局
- 2024-08-08 16:58:45
本发明涉及组合导航,尤其涉及一种适用于时变量测噪声的组合导航数据融合方法。
背景技术:
1、在组合导航系统中,数据融合技术对提高系统的可靠性和准确性至关重要。卡尔曼滤波器是常用的数据融合方法之一,它可以处理系统中的随机信号,并基于最小误差协方差原理实现最优状态估计。然而,卡尔曼滤波器假定量测噪声方差是恒定的。若量测噪声是时变的,基于卡尔曼滤波器的方法会出现性能退化,甚至发散的情况。组合导航系统常应用于卫星、高空侦察机、战略导弹等航天器,在复杂多变的空间环境中运行,受到各种随机干扰的影响。因此,量测噪声通常呈现时变特性。针对这一问题,一些基于多模型的自适应滤波方法和基于新息的自适应滤波方法被提出,但存在计算复杂度高、量测噪声过度调整和导航数据融合精度低等问题。
技术实现思路
1、有鉴于此,本发明提供了一种适用于时变量测噪声的组合导航数据融合方法,用以提高数据融合的精确度和实时性,降低计算的复杂度,以及避免量测噪声的过度调整。
2、第一方面,本发明提供了一种适用于时变量测噪声的组合导航数据融合方法,所述方法包括:
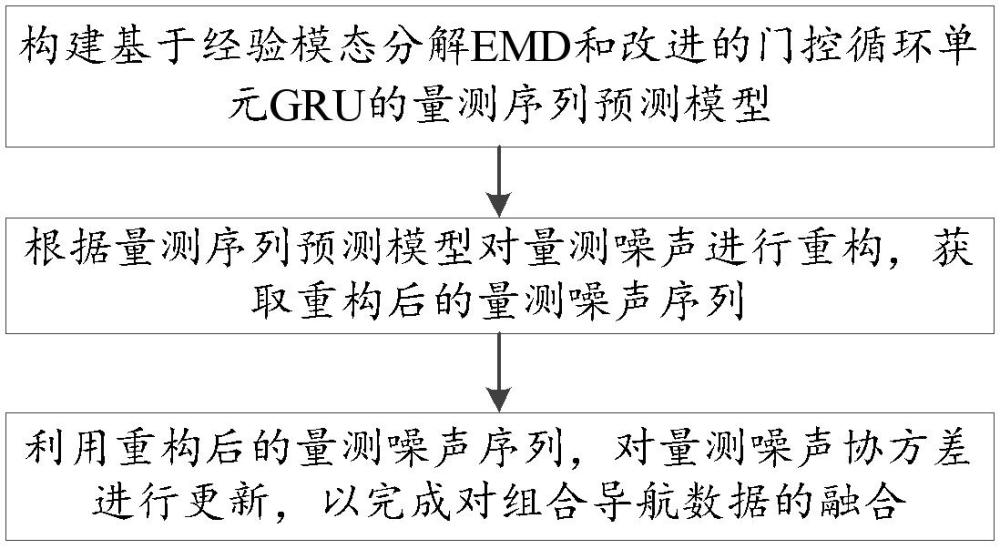
3、步骤1、构建基于经验模态分解emd和改进的门控循环单元gru的量测序列预测模型;
4、步骤2、根据步骤1中的量测序列预测模型对量测噪声进行重构,获取重构后的量测噪声序列;
5、步骤3、利用步骤2中重构后的量测噪声序列,对量测噪声协方差进行更新,以完成对组合导航数据的融合。
6、可选地,所述步骤1包括:
7、步骤11、给定时刻前个时刻的状态估计值序列和时刻以及时刻后个时刻的量测估计值序列,对状态估计值序列进行经验模态分解emd分解,得到高频本征模态函数、中频本征模态函数和低频本征模态函数;
8、步骤12、对步骤11中的高频本征模态函数进行经验模态分解emd分解,得到个本征模态函数;将个本征模态函数、中频本征模态函数和低频本征模态函数组成新的本征模态函数分量集合;
9、步骤13、将步骤12中新的本征模态函数分量集合和步骤11中量测估计值序列分别作为输入样本和输出样本对改进的门控循环单元gru进行训练,得到量测序列预测模型。
10、可选地,所述改进的门控循环单元gru的获取方式为:
11、在门控循环单元gru中增加激活函数leakyrelu,以对全连接层的输出进行约束;将损失函数huber loss作为输出,并将其反馈至门控循环单元gru的重置门和更新门,进行误差的反向传播,以得到改进的门控循环单元gru;
12、激活函数leakyrelu的表达式为:
13、;
14、其中,表示输入量,表示超参数;
15、损失函数huber loss的表达式为:
16、;
17、其中,表示模型的输出值,表示真实值,表示阈值参数。
18、可选地,所述步骤2包括:
19、步骤21、将在时刻累积的量测序列表示为,其中表示在时刻的量测,表示正整数;将时刻前个时刻的状态估计值序列,经步骤1处理后并输入量测序列预测模型,得到预测的量测序列;根据预测的量测序列对时刻累积的量测序列进行扩展,得到扩展后的量测序列为;
20、步骤22、通过经验模态分解emd对扩展后的量测序列进行分解处理,分解得到的第一阶本征模态函数为,即重构的量测噪声序列,其中,。
21、可选地,所述步骤3包括:
22、步骤31、利用重构后的量测噪声序列,对量测噪声协方差进行更新计算,其计算的表达式为:
23、;
24、其中,,的取值范围为[0.99,0.999];
25、步骤32、给定一个组合导航系统的系统模型,其表达式为:
26、;
27、;
28、其中,表示在时刻维的状态量;表示在时刻维的量测;表示状态方程;表示量测方程;表示过程噪声;表示量测噪声;
29、给定在时刻过程噪声的协方差、量测噪声的协方差、状态量估计值和状态量误差协方差的值;
30、首先,通过如下表达式计算容积点:
31、;
32、其中,,表示乔列斯基分解;,表示维单位矩阵的第列向量;;
33、获取组合导航系统的预测状态及其误差协方差,其表达式分别为:
34、;
35、;
36、其中,;
37、获取先验容积点误差矩阵,其表达式为:
38、;
39、其中,,;
40、对先验容积点误差矩阵进行更新,其更新的表达式为:
41、;
42、获取用于近似似然函数的传播容积点,其表达式为:
43、;
44、其中,表示的第列向量,;
45、然后,计算量测预测值以及状态预测值和量测预测值之间的互协方差,其表达式分别为:
46、;
47、;
48、通过更新得到的量测噪声协方差,计算量测预测值误差的协方差,并更新状态估计值及其误差协方差,其表达式分别为:
49、;
50、;
51、;
52、其中,表示卡尔曼增益,且;表示的转置矩阵;
53、最后,更新后验容积点误差矩阵以及用于下一次组合导航数据融合的容积点,其表达式分别为:
54、;
55、;
56、其中,表示参数矩阵,表示的第列向量,。
57、本发明提供的技术方案中,该方法包括构建基于经验模态分解emd和改进的门控循环单元gru的量测序列预测模型;根据量测序列预测模型对量测噪声进行重构,获取重构后的量测噪声序列;利用重构后的量测噪声序列,对量测噪声协方差进行更新,以完成对组合导航数据的融合,该方法提高了数据融合的精确度和实时性,降低了计算的复杂度,以及避免了量测噪声的过度调整。
技术特征:1.一种适用于时变量测噪声的组合导航数据融合方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述步骤1包括:
3.根据权利要求2所述的方法,其特征在于,所述改进的门控循环单元gru的获取方式为:
4.根据权利要求1所述的方法,其特征在于,所述步骤2包括:
5.根据权利要求1所述的方法,其特征在于,所述步骤3包括:
技术总结本发明涉及组合导航技术领域,尤其是提供了一种适用于时变量测噪声的组合导航数据融合方法。该方法包括构建基于经验模态分解EMD和改进的门控循环单元GRU的量测序列预测模型;根据量测序列预测模型对量测噪声进行重构,获取重构后的量测噪声序列;利用重构后的量测噪声序列,对量测噪声协方差进行更新,以完成对组合导航数据的融合,该方法提高了数据融合的精确度和实时性,降低了计算的复杂度,以及避免了量测噪声的过度调整。技术研发人员:柳笛,孙凯,王朝霞,杜明骏,马宇,吕慧受保护的技术使用者:齐鲁工业大学(山东省科学院)技术研发日:技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/271593.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。