一种微型清污机器人及其清污方法
- 国知局
- 2024-08-08 17:01:07
本发明涉及光伏发电运维,具体涉及一种微型清污机器人及其清污方法。
背景技术:
1、大型光伏电站一般由多个光伏阵列组成,大多建在如沙漠,山地等自然环境比较恶劣的地区,光伏板阵列容易遭受树叶、沙砾、鸟粪等障碍物阻挡或大气中灰尘、矿物质结晶等物质附着导致光伏发电组件产生热斑效应,影响发电效率、大幅减少光伏板件的使用寿命。
2、为消除由污物遮挡所导致的热斑现象,专利 cn112620194a 一种用于平铺光伏板的遥控式清扫机器人,其第一毛刷通过第一转动电机进行打扫,且第一电机通过转轴与第二转动电机相互连接,使得第一毛刷和第二毛刷交叉,优化产品结构,机器人本体在打扫时能够更加快速高效的完成作业。
3、然而,该专利中通过毛刷清理光伏板件表面时,不可避免的使光伏板件表面变得粗糙,导致光线在表面形成漫反射,影响组件的透光率和光电转换效率。
技术实现思路
1、本发明的目的在于克服上述技术不足,提出一种微型清污机器人及其的清污方法,解决现有技术中通过毛刷清理光伏板件表面时,不可避免的使光伏板件表面变得粗糙,导致光线在表面形成漫反射,影响组件的透光率和光电转换效率的技术问题。
2、为达到上述技术目的,本发明采取了以下技术方案:
3、第一方面,本发明提供了一种微型清污机器人,包括:
4、机座;
5、清污罩,包括罩体及清污驱动部,所述罩体具有收纳于所述机座的收纳状态,以及罩设于待清理设备表面的工作状态,所述罩体设有连通其内腔的进液流道,所述清污驱动部设于所述机座,并与所述罩体驱动连接,用于驱使所述罩体在所述收纳状态与所述工作状态之间切换;
6、储液箱,连通所述进液流道,能够经由所述进液流道向所述罩体的内腔提供清洗液;
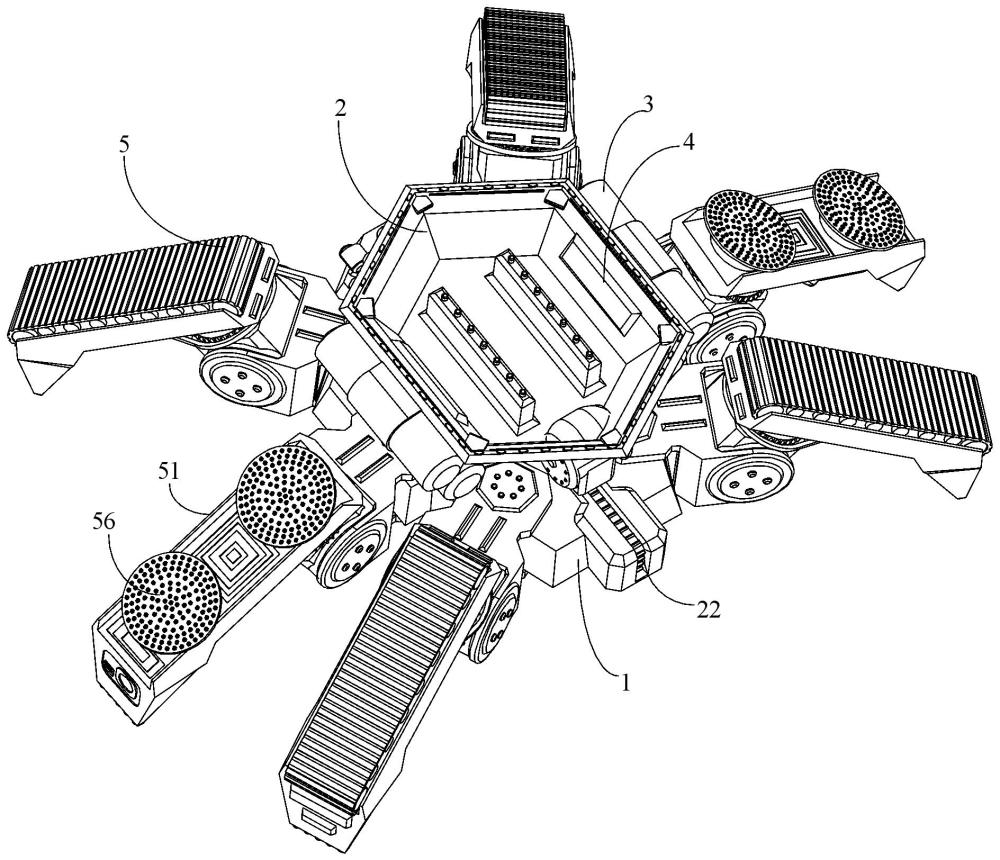
7、超声波发生器,设于所述罩体的内腔,用于产生超声波;及
8、行走机构,安装于所述机座,用于带动所述机座移动。
9、在一些实施例中,所述清污罩还包括废液箱,所述罩体设有排液流道,所述排液流道连通所述废液箱及所述罩体的内腔,且其连通所述罩体内腔的一端靠近所述罩体的开口端。
10、在一些实施例中,所述清污罩还包括红外信号收发装置,所述红外信号收发装置设于所述罩体的内腔,且靠近所述罩体的开口端。
11、在一些实施例中,所述清污罩还包括鼓风机,所述鼓风机安装于所述罩体,并位于所述罩体的内腔外,且其风口连通所述罩体的内腔;
12、所述清污罩还包括密封圈,所述密封圈设于所述罩体的开口端。
13、在一些实施例中,所述清污驱动部包括驱动链条及驱动电机,所述驱动链条设于所述机座,且自所述机座的中部延伸至端缘,所述驱动电机的座体安装于所述驱动链条;
14、所述罩体安装于所述驱动电机的转子。
15、在一些实施例中,所述行走机构包括多个行走臂,多个所述行走臂安装于所述机座,且沿所述机座的周向间隔设置,各所述行走臂包括安装轴、连接轴、行走足、第一驱动部及第二驱动部,所述安装轴转动安装于所述机座,所述连接轴固定安装于所述安装轴,且其轴向与所述安装轴的轴向相交,所述行走足转动安装于所述连接轴,所述第一驱动部与所述安装轴驱动连接,用于驱动所述安装轴转动,所述第二驱动部与所述行走足驱动连接,用于驱动所述行走足绕所述连接轴的轴向转动。
16、在一些实施例中,所述行走足包括行走板及行走座,所述行走板一端转动安装于所述连接轴,所述行走座连接于所述行走板的另一端,且与所述连接轴位于所述行走板的同侧;
17、所述行走臂还包括多组行走吸盘,多组所述行走吸盘分别设于多个所述行走座,各所述行走吸盘位于所述行走座远离所述行走板的一侧。
18、在一些实施例中,至少一所述行走板设有行走履带;和/或,
19、各所述行走座设有超声波避障装置;和/或,
20、所述行走座远离所述连接轴的一侧设有侧位视觉识别装置,且所述机座的下侧设有俯位视觉识别装置。
21、在一些实施例中,至少一所述行走板远离所述连接轴的一侧设有磨刷盘及水雾发生器;
22、所述行走机构还包括第三驱动部,所述第三驱动部与所述磨刷盘驱动连接,用于驱动所述磨刷盘转动。
23、第二方面,本发明还提供了一种微型清污机器人的清污方法,用于如上任意一项所述的微型清污机器人,所述的微型清污机器人的清污方法包括如下步骤:
24、控制所述行走机构带动所述机座移动至光伏板件表面的污物位置;
25、然后控制所述清污驱动部驱使所述罩体相对所述机座活动,使得所述罩体罩设在光伏板的污物位置区域,以在罩体与光伏板污物区域之间形成密闭空间;
26、再控制所述储液箱将其中的清洗液经由进液流道输向所述密闭空间内;
27、然后控制所述超声波发生器产生超声波,对污物进行超声波清洗;
28、待清理预设时间后,再控制所述清污驱动部驱使所述罩体收纳于所述机座。
29、与现有技术相比,本发明提供的微型清污机器人在通过无人机搭载至光伏板上后,再借助行走机构移动至光伏板表面的污物位置,然后通过清污驱动部驱使罩体相对机座活动,使得罩体罩设在光伏板的污物位置区域,以在罩体与光伏板污物区域之间形成密闭空间;再将储液箱内的清洗液经由进液流道输向罩体与光伏板形成的密闭空间内,然后通过超声波发生器产生超声波,对污物进行超声波清洗,以消除污物,避免毛刷磨损光伏板表面,极大程度的保证板件表面的完整度。
技术特征:1.一种微型清污机器人,其特征在于,包括:
2.根据权利要求1所述的微型清污机器人,其特征在于,所述清污罩还包括废液箱,所述罩体设有排液流道,所述排液流道连通所述废液箱及所述罩体的内腔,且其连通所述罩体内腔的一端靠近所述罩体的开口端。
3.根据权利要求2所述的微型清污机器人,其特征在于,所述清污罩还包括红外信号收发装置,所述红外信号收发装置设于所述罩体的内腔,且靠近所述罩体的开口端。
4.根据权利要求1至3中任意一项所述的微型清污机器人,其特征在于,所述清污罩还包括鼓风机,所述鼓风机安装于所述罩体,并位于所述罩体的内腔外,且其风口连通所述罩体的内腔;
5.根据权利要求1所述的微型清污机器人,其特征在于,所述清污驱动部包括驱动链条及驱动电机,所述驱动链条设于所述机座,且自所述机座的中部延伸至端缘,所述驱动电机的座体安装于所述驱动链条;
6.根据权利要求1所述的微型清污机器人,其特征在于,所述行走机构包括多个行走臂,多个所述行走臂安装于所述机座,且沿所述机座的周向间隔设置,各所述行走臂包括安装轴、连接轴、行走足、第一驱动部及第二驱动部,所述安装轴转动安装于所述机座,所述连接轴固定安装于所述安装轴,且其轴向与所述安装轴的轴向相交,所述行走足转动安装于所述连接轴,所述第一驱动部与所述安装轴驱动连接,用于驱动所述安装轴转动,所述第二驱动部与所述行走足驱动连接,用于驱动所述行走足绕所述连接轴的轴向转动。
7.根据权利要求6所述的微型清污机器人,其特征在于,所述行走足包括行走板及行走座,所述行走板一端转动安装于所述连接轴,所述行走座连接于所述行走板的另一端,且与所述连接轴位于所述行走板的同侧;
8.根据权利要求7所述的微型清污机器人,其特征在于,至少一所述行走板设有行走履带;和/或,
9.根据权利要求7所述的微型清污机器人,其特征在于,至少一所述行走板远离所述连接轴的一侧设有磨刷盘及水雾发生器;
10.一种微型清污机器人的清污方法,用于如权利要求1至9中任意一项所述的微型清污机器人,其特征在于,所述的微型清污机器人的清污方法包括如下步骤:
技术总结本发明公开了一种微型清污机器人及其清污方法,微型机器人包括机座、清污罩、储液箱、超声波发生器及行走机构;清污罩包括罩体及清污驱动部,罩体具有收纳于机座的收纳状态,以及罩设于待清理设备表面的工作状态,罩体设有连通其内腔的进液流道,清污驱动部设于机座,并与罩体驱动连接,用于驱使罩体在收纳状态与工作状态之间切换;储液箱连通进液流道,能够经由进液流道向罩体的内腔提供清洗液;超声波发生器设于罩体的内腔,用于产生超声波;行走机构安装于机座,用于带动机座移动。本方案通过超声波发生器对污物进行超声波清洗,以消除污物,避免毛刷磨损光伏板表面,极大程度的保证板件表面的完整度。技术研发人员:张彦,罗阳,原江浩,李建超,王华浩受保护的技术使用者:武汉理工大学技术研发日:技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/271838.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。