用于眼底摄像装置的自动校准和对准的系统和方法与流程
- 国知局
- 2024-08-08 17:05:23
本申请的各种实施例涉及用于眼底摄像机的自动校准和对准的方法、装置和系统。更具体地,本发明涉及用于立体摄像机、可移动平台的校准、基于眼底摄像装置的照明投影的定位及其快速验证的方法、装置和系统。
背景技术:
1、眼底摄像机是一种设计用于拍摄眼底图像(即,眼睛后部的图像)以捕捉诸如视网膜、视神经盘、黄斑等特征的设备。眼底摄像机主要由验光师、眼科医生等专业人士用来进行眼底诊断和成像。眼底摄像装置通常需要训练有素的操作员将眼底摄像机与眼睛的瞳孔对准。
2、通常,眼底摄像装置的设置涉及眼底摄像机和诸如可移动平台、照明源(例如闪光灯)和对准传感器等其他部件。能够使用可移动平台来操纵眼底摄像机以获得用于拍摄眼底图像的理想位置。可移动平台能够在各个轴上进行线性运动或旋转运动。例如,x-y-z运动、平移-倾斜-z运动、一次一个轴或同时多个轴。
3、摄像机校准是指确定摄像机设置的参数并估计摄像机的内在和外在属性的过程。一般来说,固有参数有助于确定哪个入射光线与图像传感器中的哪个像素相关联。内在参数可以包括但不限于单个摄像机的属性,例如其焦距、轴倾斜、畸变、图像中心等。外在参数描述其在现实世界中的位置和方向、多个摄像机之间的位置关系、平移和旋转偏移等。
4、立体摄像机通常是指能够拍摄三维图像的两个摄像机的特殊设置。通常,立体摄像机的校准是使用棋盘格作为校准目标来进行的。
5、此外,由于恶劣的运输条件、操作环境等,眼底摄像机或系统的其他部件的对准或校准很可能会受到影响。眼底摄像机或设备的其他部件的对准或校准的任何变化都可能影响眼底图像的质量。
6、因此,需要在使用眼底摄像机进行任何眼底成像之前确定眼底摄像机和设备的其他部件的工作状况。如参考附图在本申请的其余部分所阐述的,通过将所描述的系统与本公开的一些方面进行比较,常规和传统方法的限制和缺点对于本领域技术人员来说将变得显而易见。
技术实现思路
1、公开了一种如权利要求1所述的校准其上安装有立体摄像机的可移动平台的运动的方法以及相应的系统和计算机程序,该方法用于自动校准摄像装置的系统中。
2、描述了一种眼底摄像装置和该装置的自动对准。在一个实施例中,描述了包括光学系统、眼底摄像机、立体摄像机、照明源和可移动平台的眼底摄像装置的自动对准。位于眼底摄像装置的远端的立体摄像机包括左摄像机和右摄像机。立体摄像机的校准包括拍摄多平面校准目标的图像。多平面校准目标的每个平面包括多个基准标记。用于拍摄眼底图像的眼底摄像装置的最佳位置的校准包括使用照明源的校准,其中照明源可以用于照明眼睛校准目标。在对立体摄像机和眼底摄像装置的最佳位置进行校准时,可以自动对准眼底摄像装置。
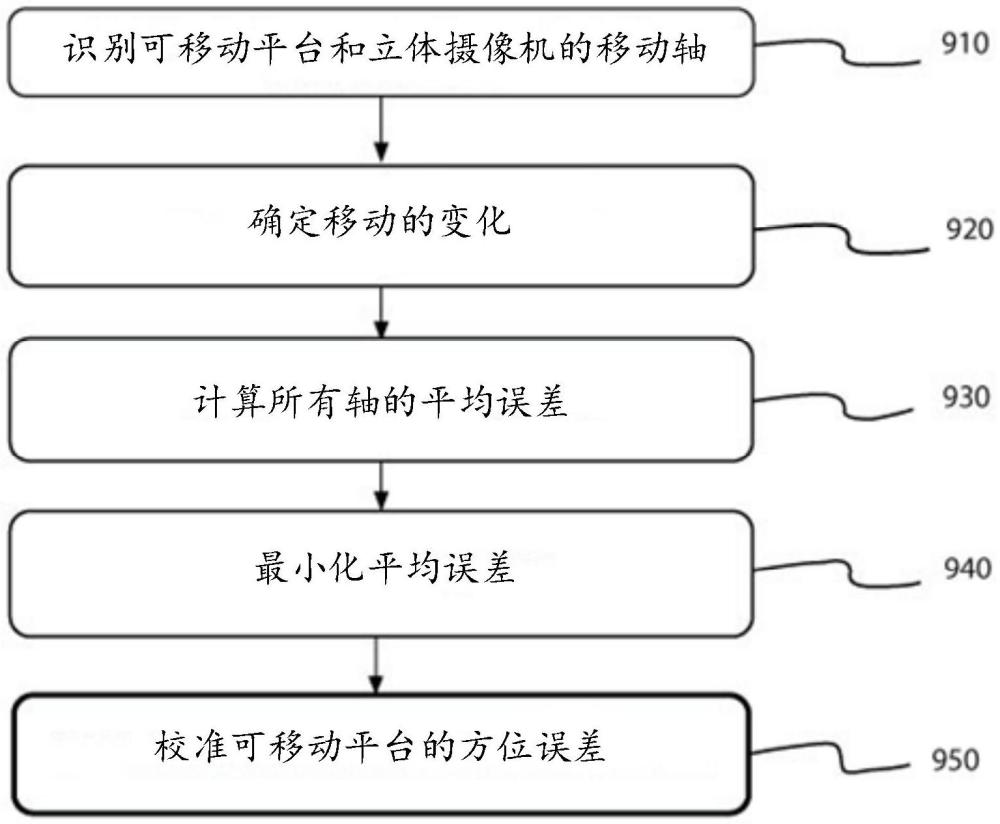
3、本公开还包括可移动平台的校准。可移动平台的轴与立体摄像机的轴之间的运动的变化用于确定误差。一旦确定了误差,就可以计算所有轴的平均误差。为了最小化平均误差,立体摄像机的轴被虚拟地旋转以匹配可移动平台的轴。
4、另外,本公开包括在使用之前对眼底摄像装置的快速验证。使用立体摄像机拍摄多平面校准目标的图像,并计算拍摄图像中所有检测到的基准标记的重投影误差的平均值。根据计算的重投影误差的平均值,验证平均误差是否在预定义阈值内。此外,眼底摄像装置被定位成使得眼睛校准目标处于最佳坐标处。然后打开照明源并照亮眼睛校准目标。计算正确校准的眼底摄像装置的保存的照明投影属性与在该验证中观察到的照明投影属性之间的误差。根据计算出的投影属性误差,验证该误差是否在预定义阈值内。
5、在另一实施例中,验证眼底摄像机的图像传感器与照明源的投影之间的对准。该验证包括计算所识别的照明投影的中心与眼底摄像机图像的中心之间的误差。一旦计算出误差,就能验证误差是否在预定义阈值内。为了计算照明投影的中心与眼底图像的中心之间的误差,在该过程中还可以使用眼睛校准目标和立体摄像机。
6、通过对本公开的以下详细描述以及附图的回顾,可以理解本公开的这些和其他特征和优点,在附图中,相同的附图标记自始至终指代相同的部件。
技术特征:1.一种校准其上安装有立体摄像机的可移动平台的运动的方法,用于自动校准摄像装置的系统中,包括以下步骤:
2.根据权利要求1所述的方法,其中,当所述平均误差在预定义阈值内时,确定所述可移动平台被校准。
3.根据权利要求1所述的方法,其中,通过将所述可移动平台沿第一轴移动第一固定距离并同时使用所述立体摄像机拍摄所述多平面校准目标的图像,来确定所述移动变化。
4.根据权利要求3所述的方法,其中,所述立体摄像机用于计算所述标记的位置偏移以确定沿着所述第一轴的第二固定距离。
5.根据权利要求4所述的方法,其中,计算所述移动变化,作为所述第二固定距离与所述第一固定距离之间的差。
6.根据权利要求5所述的方法,其中,计算沿着第二轴的变化。
7.根据权利要求6所述的方法,其中,计算沿着第三轴的变化。
8.根据前述权利要求中任一项所述的方法,其中,所述虚拟地旋转旋转所述立体摄像机的轴系的取向,以最小化所述可移动平台相对于所述轴系的误差。
9.根据权利要求8所述的方法,其中,使用标量乘法来最小化每个轴中的误差。
10.根据权利要求8所述的方法,其中,所述虚拟地旋转涉及将旋转矩阵乘以预测坐标。
11.根据前述权利要求中任一项所述的方法,其中,所述确定、计算和最小化步骤由控制单元在软件控制下执行。
12.根据前述权利要求中任一项所述的方法,其中,在所述识别步骤之前执行快速验证,其中所述方法判断与所述摄像装置的预校准组件相关的预先存在的校准文件是否与所述摄像装置的功能兼容。
13.根据权利要求12所述的方法,其中,对所述摄像装置的快速验证提供有所述预校准组件中的误差,并且如果这样的误差低于预定义阈值,则确定所述摄像装置被验证并且所述摄像装置被视为准备好使用。
14.根据权利要求13所述的方法,其中,如果所述误差高于所述预定义阈值,则执行权利要求1的步骤。
15.根据前述权利要求中任一项所述的方法,其中,所述一个或多个拍摄的图像具有所述校准目标的部分或完整视图。
16.一种系统,包括适于执行根据前述方法权利要求中任一项所述的方法的所有步骤的装置。
17.一种计算机程序,包括指令,当在计算机系统上执行所述计算机程序时,所述指令执行根据前述方法权利要求中任一项所述的方法的所有步骤。
技术总结用于眼底摄像装置的自动对准和校准的系统、装置和方法的实施例。采用立体摄像机、眼底摄像机、可移动平台、照明源和多平面校准目标。安装在可移动平台上的立体摄像机拍摄多平面校准目标的平面图像。多平面校准目标嵌入有基准标记,以校准立体摄像机的内在和外在属性。照明源被配置为校准眼底摄像机相对于眼睛校准目标的位置的位置。对可移动平台和立体摄像机的轴系进行校准。验证眼底摄像机的图像传感器的对准。使用前对所有组件进行快速验证。如果各部件的误差值在预定阈值内,则眼底摄像装置可以自动对准。技术研发人员:阿达尔什·梅恩迪拉塔,阿哈迈德哈利勒·乌迪亚瓦尔阿卜杜勒,安基特·莫尔亚,安德斯·艾肯内斯,汉斯艾纳尔·厄弗约杜特,萨塔克·普拉卡什,尤卡·阿拉西尔尼奥受保护的技术使用者:奥维阿斯技术研发日:技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/272289.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表