一种挖泥船耙臂姿态传感器的制作方法
- 国知局
- 2024-08-19 14:16:48
本发明涉及河道疏浚领域,特别涉及一种挖泥船耙臂姿态传感器。
背景技术:
1、随着工业技术的发展,现代的河道清理技术发展越来越完善,耙吸式挖泥船是疏浚船舶主要船型之一,他通过将耙臂放至水底,运行时船上泵组产生吸力,通过安装在耙管末端的耙头吸入水底的泥沙实现挖掘作用。由于耙臂工作时处于水平面以下,无法直接观察耙管的姿态,需要通过各种传感器来实现耙管的姿态,耙管一般有2-3节组成,每节之间有橡胶软管连接,现有的姿态指示是在每节耙管安装各自的倾斜角度传感器和关节处的水平角度传感器来计算耙臂姿态。
技术实现思路
1、本发明的目的在于提供一种挖泥船耙臂姿态传感器,该装置在使用的时候,耙臂姿态传感器下固定端与下耙管固定,耙臂姿态传感器上固定端与上耙管固定,当上耙管与下耙管有相对运动时,耙臂姿态传感器柔性测量段跟随运动,并改变内部测量段光纤的三维形状,耙臂姿态传感器柔性测量段形成的光变化信号通过光纤传输段与光纤解调器相连,通过解调器计算光纤姿态数据,并反馈给船上的耙臂指示系统,用于施工作业,以解决上述背景技术中提出的问题。
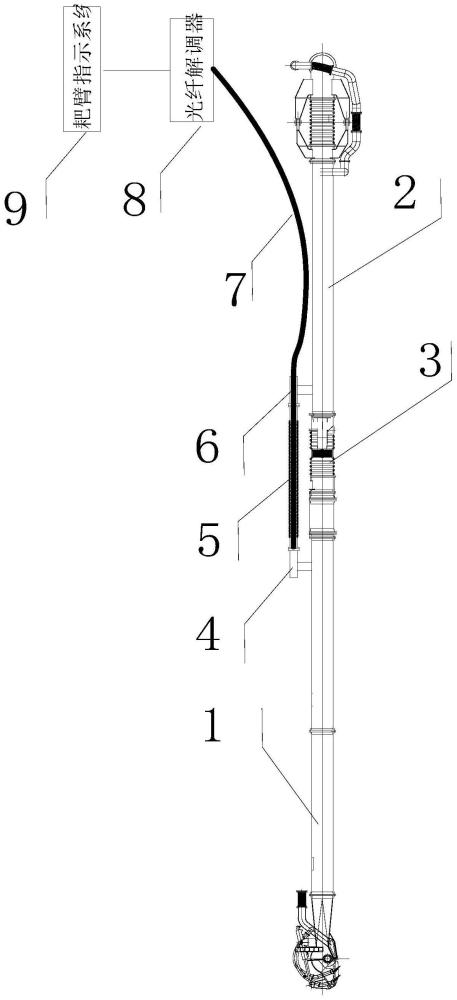
2、为实现上述目的,本发明提供如下技术方案:一种挖泥船耙臂姿态传感器,包括船体和耙臂,耙臂处在船体的底部,所述耙臂包括下耙管和上耙管,上耙管的顶端通过第一踝关节和船体底部连接,下耙管和上耙管之间通过第二踝关节连接,所述下耙管的底部设置有挖泥兜,所述下耙管的侧壁上设置有耙臂姿态传感器下固定端,上耙管的侧壁上设置有耙臂姿态传感器上固定端,耙臂姿态传感器下固定端和耙臂姿态传感器上固定端的轮廓呈l型,耙臂姿态传感器下固定端和耙臂姿态传感器上固定端之间连接有耙臂姿态传感器柔性测量段,耙臂姿态传感器柔性测量段连接到数据上传机构上。
3、进一步,所述数据上传机构包括光纤传输段,光纤传输段连接到耙臂姿态传感器上固定端上,所述光纤传输段的上端连接到船体内部的数据整合机构上。
4、进一步,所数据整合机构述包括光纤解调器和耙臂指示系统,耙臂指示系统连接到中央控制室,光纤传输段连接到光纤解调器上,光纤解调器将耙臂姿态传感器柔性测量段的形变数字化传输给耙臂指示系统。
5、进一步,所述第二踝关节的外侧包裹连接软管,连接软管的两个端口分别与下耙管和上耙管的外侧壁防水贴合,所述下耙管和上耙管的外侧喷涂腐蚀漆料,连接软管的内部注满柔软硅胶。
6、进一步,所述船体的底部设置有半球腔,第一踝关节安装在船体底部的半球腔里,所述半球腔的开口处设置有圆形皮垫,圆形皮垫的中间设置有圆口,圆口和上耙管的顶部密封连接,圆形皮垫的边缘和半球腔的开口密闭连接。
7、进一步,所述圆形皮垫和半球腔的内部冲入高压空气,圆形皮垫胀大之后和半球腔形成整球轮廓。
8、进一步,所述耙臂姿态传感器柔性测量段的内部设置有光纤段,光纤处于柔性外壳的中心,且光纤段通过填充物固定。
9、综上所述,由于采用了上述技术,本发明的有益效果是:
10、其一,该装置在使用的时候,耙臂姿态传感器下固定端与下耙管固定,耙臂姿态传感器上固定端与上耙管固定,当上耙管与下耙管有相对运动时,耙臂姿态传感器柔性测量段跟随运动,并改变内部测量段光纤的三维形状,耙臂姿态传感器柔性测量段形成的光变化信号通过光纤传输段与光纤解调器相连,通过解调器计算光纤姿态数据,并反馈给船上的耙臂指示系统,用于施工作业。
11、其二,船体内部装入的泥沙越来越的时候,船体的重力会越来越大然船体下沉,工作人员根据船体吃水的深浅往圆形皮垫和半球腔的内部加压来保证球空间内部的容积,第一踝关节在球形的空间内部可以避免水中杂草等漂浮物的干扰。
技术特征:1.一种挖泥船耙臂姿态传感器,其特征在于:包括船体和耙臂,耙臂处在船体的底部,所述耙臂包括下耙管(1)和上耙管(2),上耙管(2)的顶端通过第一踝关节和船体底部连接,下耙管(1)和上耙管(2)之间通过第二踝关节连接,所述下耙管(1)的底部设置有挖泥兜,所述下耙管(1)的侧壁上设置有耙臂姿态传感器下固定端(4),上耙管(2)的侧壁上设置有耙臂姿态传感器上固定端(6),耙臂姿态传感器下固定端(4)和耙臂姿态传感器上固定端(6)的轮廓呈l型,耙臂姿态传感器下固定端(4)和耙臂姿态传感器上固定端(6)之间连接有耙臂姿态传感器柔性测量段(5),耙臂姿态传感器柔性测量段(5)连接到数据上传机构上。
2.根据权利要求1所述的一种挖泥船耙臂姿态传感器,其特征在于:所述数据上传机构包括光纤传输段(7),光纤传输段(7)连接到耙臂姿态传感器上固定端(6)上,所述光纤传输段(7)的上端连接到船体内部的数据整合机构上。
3.根据权利要求2所述的一种挖泥船耙臂姿态传感器,其特征在于:所数据整合机构述包括光纤解调器(8)和耙臂指示系统(9),耙臂指示系统(9)连接到中央控制室,光纤传输段(7)连接到光纤解调器(8)上,光纤解调器(8)将耙臂姿态传感器柔性测量段(5)的形变数字化传输给耙臂指示系统(9)。
4.根据权利要求1所述的一种挖泥船耙臂姿态传感器,其特征在于:所述第二踝关节的外侧包裹连接软管(3),连接软管(3)的两个端口分别与下耙管(1)和上耙管(2)的外侧壁防水贴合,所述下耙管(1)和上耙管(2)的外侧喷涂腐蚀漆料,连接软管(3)的内部注满柔软硅胶。
5.根据权利要求1所述的一种挖泥船耙臂姿态传感器,其特征在于:所述船体的底部设置有半球腔,第一踝关节安装在船体底部的半球腔里,所述半球腔的开口处设置有圆形皮垫,圆形皮垫的中间设置有圆口,圆口和上耙管(2)的顶部密封连接,圆形皮垫的边缘和半球腔的开口密闭连接。
6.根据权利要求5所述的一种挖泥船耙臂姿态传感器,其特征在于:所述圆形皮垫和半球腔的内部冲入高压空气,圆形皮垫胀大之后和半球腔形成整球轮廓。
7.根据权利要求1所述的一种挖泥船耙臂姿态传感器,其特征在于:所述耙臂姿态传感器柔性测量段(5)的内部设置有光纤段,光纤处于柔性外壳的中心,且光纤段通过填充物固定。
技术总结本发明公开了一种挖泥船耙臂姿态传感器,属于河道疏浚领域,该装置包括船体和耙臂,耙臂处在船体的底部,所述耙臂包括下耙管和上耙管,耙臂姿态传感器下固定端和耙臂姿态传感器上固定端之间连接有耙臂姿态传感器柔性测量段,耙臂姿态传感器柔性测量段连接到数据上传机构上。本发明在使用的时候,耙臂姿态传感器下固定端与下耙管固定,耙臂姿态传感器上固定端与上耙管固定,当上耙管与下耙管有相对运动时,耙臂姿态传感器柔性测量段跟随运动,并改变内部测量段光纤的三维形状,耙臂姿态传感器柔性测量段形成的光变化信号通过光纤传输段与光纤解调器相连,通过解调器计算光纤姿态数据,并反馈给船上的耙臂指示系统,用于施工作业。技术研发人员:华文博,操喜峰受保护的技术使用者:镇江明润信息科技有限公司技术研发日:技术公布日:2024/8/16本文地址:https://www.jishuxx.com/zhuanli/20240819/274562.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表