基于区域边界网格模型剪裁的空间点阵建模方法及系统与流程
- 国知局
- 2024-08-22 14:28:11
本发明涉及点阵结构的有限元仿真建模和几何建模,尤其涉及一种基于区域边界网格模型剪裁的空间点阵建模方法及系统。
背景技术:
1、点阵结构是一种用于填充在承载结构内部空腔中,能够有效增强结构刚度的轻量化填充结构。结合增材制造等先进制备方法,点阵结构已被成功应用于薄壁承载、维型结构中,典型的应用例如:飞行器的薄壁翼面结构,在上下蒙皮间填充点阵,通过增材制造工艺实现点阵结构的快速成型,在实现结构刚度强度性能提升的同时,也能够大幅度提升增材制造过程中效率,实现结构的轻量化和低成本。
2、目前,现有的空间点阵建模方法包括两种,一种是基于几何模型布尔运算的建模方法,该方法主要用于几何建模和增材制造,需要使用专门的几何建模软件进行布尔操作,运算量和模型规模大,也难以直接生成有限元仿真模型;另一种是基于有限元体网格的建模方法,该方法需要先在点阵填充空间生成三维体网格,再根据体网格信息生成点阵的杆模型,此类方法受几何体形状限制严重,对于复杂工程结构,难以生成均匀分布的点阵模型。
3、为了解决对工程中复杂几何结构的点阵快速建模问题,本发明提出一种不依赖几何和体网格的点阵建模方法,该方法以结构内部填充区域的内表面边界网格模型为输入来快速生成空间点阵模型,生成的模型可直接应用于有限元仿真分析以及点阵结构的优化设计,同时,通过将模型文件进一步转换为结构设计和增材制造所需的数据格式,可应用于结构的精细化建模及增材制造。
技术实现思路
1、本发明提供了一种基于区域边界网格模型剪裁的空间点阵建模方法及系统,能够解决现有技术中模型运算量大、规模大、受几何形状限制严重的技术问题。
2、根据本发明的一方面,提供了一种基于区域边界网格模型剪裁的空间点阵建模方法,方法包括:
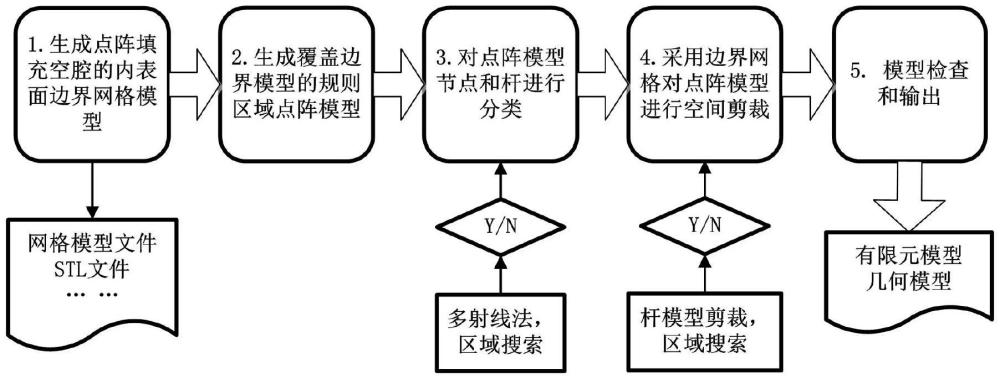
3、s1,根据目标结构模型生成点阵填充空腔的内表面边界网格模型;
4、s2,根据目标结构的形状建立包含内表面边界网格模型的规则空间区域,并根据预设点阵分布参数对规则空间区域进行点阵填充;
5、s3,对规则空间区域内的每个点阵节点均沿多个不同矢量方向引出射线,根据每个点阵节点引出的多条射线与内表面边界网格模型的交点数量判断每个点阵节点与内表面边界网格模型的位置关系;
6、s4,根据每个点阵节点与内表面边界网格模型的位置关系判断每个点阵杆与内表面边界网格模型的位置关系;
7、s5,根据任意两个点阵节点间的点阵杆与内表面边界网格模型的位置关系对规则空间区域内填充的点阵进行剪裁以得到填充目标结构模型空腔的空间点阵模型。
8、进一步地,规则空间区域为六面体、球或圆柱体。
9、进一步地,预设点阵分布参数包括点阵初始位置、点阵类型、点阵复制方向和点阵几何参数。
10、进一步地,s3包括:
11、s31,确定一个矢量方向;
12、s32,利用平行于所确定矢量方向的平面将规则空间区域划分为多个原始子域;
13、s33,将每个原始子域的每个面沿其法向向外膨胀预设距离以得到对应的多个膨胀子域;
14、s34,遍历表面边界网格模型的每个面网格以及规则空间区域内每个点阵节点以将其归类到各个膨胀子域中;
15、s35,对规则空间区域内的每个点阵节点均沿确定的矢量方向引出射线;
16、s36,改变矢量方向,重复s32至s35以分别得到每种矢量方向下每个膨胀子域内每个点阵节点引出的射线与对应膨胀子域中面网格的交点数量;
17、s37,根据s36得到的交点数量判断每个点阵节点与内表面边界网格模型的位置关系。
18、进一步地,s37包括:
19、将出现0个交点或偶数个交点的点阵节点判断为在内表面边界网格模型的外部;
20、将全部为奇数个交点的点阵节点判断为在内表面边界网格模型的内部。
21、进一步地,s4包括:
22、当点阵杆的两个点阵节点均在内表面边界网格模型的外部时,判断该点阵杆在内表面边界网格模型的外部;
23、当点阵杆的两个点阵节点均在内表面边界网格模型的内部时,判断该点阵杆在内表面边界网格模型的内部;
24、当点阵杆的两个点阵节点分别位于内表面边界网格模型的内部和外部时,判断该点阵杆跨越内表面边界网格模型。
25、进一步地,s5包括:
26、s51,当点阵杆在内表面边界网格模型的内部时,保留该点阵杆以及该点阵杆的两个点阵节点;
27、s52,当点阵杆在内表面边界网格模型的外部时,删除该点阵杆,并判断其两个点阵节点是否与其他点阵杆相连,当其点阵节点不与其他点阵杆相连时,删除该点阵节点,当其点阵节点与内表面边界网格模型外部的点阵杆相连时,删除该点阵节点,当其点阵节点与跨越内表面边界网格模型的点阵杆相连时,保留该点阵节点;
28、s53,当点阵杆跨越内表面边界网格模型时,计算得到该点阵杆的两个点阵节点之间的有向线段与内表面边界网格模型的跨界交点,进而计算得到该点阵杆上位于内表面边界网格模型内部的点阵节点与跨界交点的距离,判断距离是否小于或等于预设杆长容差值,如果是,则利用跨界交点代替该点阵杆上位于内表面边界网格模型内部的点阵节点,并删除该点阵杆以及该点阵杆上位于内表面边界网格模型外部的点阵节点,如果否,则用跨界交点代替该点阵杆上位于内表面边界网格模型外部的点阵节点。
29、进一步地,s53中,当点阵杆跨越内表面边界网格模型时,计算得到该点阵杆的两个点阵节点之间的有向线段与内表面边界网格模型的跨界交点,进而计算得到该点阵杆上位于内表面边界网格模型内部的点阵节点与跨界交点的距离包括:
30、将内表面边界网格模型进行网格离散以得到若干个平面边界网格;
31、计算该点阵杆的两个点阵节点之间的有向线段与对应的平面边界网格的跨界交点,进而计算得到该点阵杆上位于平面边界网格内部的点阵节点与跨界交点的距离。
32、进一步地,通过以下公式计算该点阵杆的两个点阵节点之间的有向线段与对应的平面边界网格的跨界交点,进而计算得到该点阵杆上位于平面边界网格内部的点阵节点与跨界交点的距离:
33、a(x'-x0)+b(y'-y0)+c(z'-z0)=0,
34、
35、上式中,表示平面边界网格的法向矢量,(x0,y0,z0)表示平面边界网格上任意已知点的空间坐标,(x',y',z')表示平面边界网格上任一点的空间坐标,(xa,ya,za)表示该点阵杆上位于平面边界网格内部的点阵节点的空间坐标,(xb,yb,zb)表示该点阵杆上位于平面边界网格外部的点阵节点的空间坐标,(x,y,z)表示跨界交点的空间坐标,t表示(xa,ya,za)与(x,y,z)的距离。
36、根据本发明的另一方面,提供了一种基于区域边界网格模型剪裁的空间点阵建模系统,系统包括初始点阵填充模块,位置关系判断模块和剪裁模块;
37、初始点阵填充模块用于根据目标结构模型生成点阵填充空腔的内表面边界网格模型;根据目标结构的形状建立包含内表面边界网格模型的规则空间区域,并根据预设点阵分布参数对规则空间区域进行点阵填充;
38、位置关系判断模块用于对规则空间区域内的每个点阵节点均沿多个不同矢量方向引出射线,根据每个点阵节点引出的多条射线与内表面边界网格模型的交点数量判断每个点阵节点与内表面边界网格模型的位置关系;根据每个点阵节点与内表面边界网格模型的位置关系判断每个点阵杆与内表面边界网格模型的位置关系;
39、剪裁模块用于根据任意两个点阵节点间的点阵杆与内表面边界网格模型的位置关系对规则空间区域内填充的点阵进行剪裁以得到填充目标结构模型空腔的空间点阵模型。
40、应用本发明的技术方案,提供了一种基于区域边界网格模型剪裁的空间点阵建模方法及系统,该方法首先生成待填充点阵的空腔区域的内表面边界网格模型;其次生成包含该空腔区域内表面边界网格的规则区域并进行点阵模型的生成,点阵模型可以是任意所需样式;之后通过射线法判断点阵模型中的点阵节点和点阵杆与空腔区域内表面边界网格的位置关系;最后根据位置关系对点阵模型进行剪裁,实现空间点阵模型的最终创建。该方法兼顾了点阵建模的效率、精度和灵活性,利用该方法能够在结构内部空腔中快速生成空间点阵填充模型,是一种高效实用的新型建模方法,已成功应用于含点阵工程结构的有限元仿真分析快速建模、简化的点阵几何建模和结构优化设计以及后续的点阵结构增材制造中。
本文地址:https://www.jishuxx.com/zhuanli/20240822/278802.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。