一种飞行器的姿态校准方法、飞行器、程序产品及介质与流程
- 国知局
- 2024-08-22 14:34:38
本申请涉及飞行器,具体而言,涉及一种飞行器的姿态校准方法、飞行器、程序产品及介质。
背景技术:
1、随着无人机的广泛应用,机载小型惯性导航系统逐渐成为人们的研究热点。惯性导航系统主要由三轴陀螺仪、加速度计和地磁传感器构成,是无人机的飞行控制器(也称飞控)获取自身姿态信息的主要来源和稳定飞行的保障,广泛应用于消费级、行业等领域无人机。其中,地磁传感器用于测量磁场强度和方向,提供绝对偏航信息,其精度决定了飞控姿态解算的精度,也直接影响进一步的位置解算结果,因此对无人机飞行有重要的影响。然而,地磁传感器容易受到测量环境的干扰,导致难以向飞控提供准确的姿态数据,这成为了本领域亟待解决的技术问题。
技术实现思路
1、本申请实施例的目的在于提供一种飞行器的姿态校准方法、飞行器、程序产品及介质,用以实现提供飞行器准确的姿态信息的技术效果。
2、本申请实施例第一方面提供了一种飞行器的姿态校准方法,所述飞行器搭载有地磁传感器;所述方法包括:
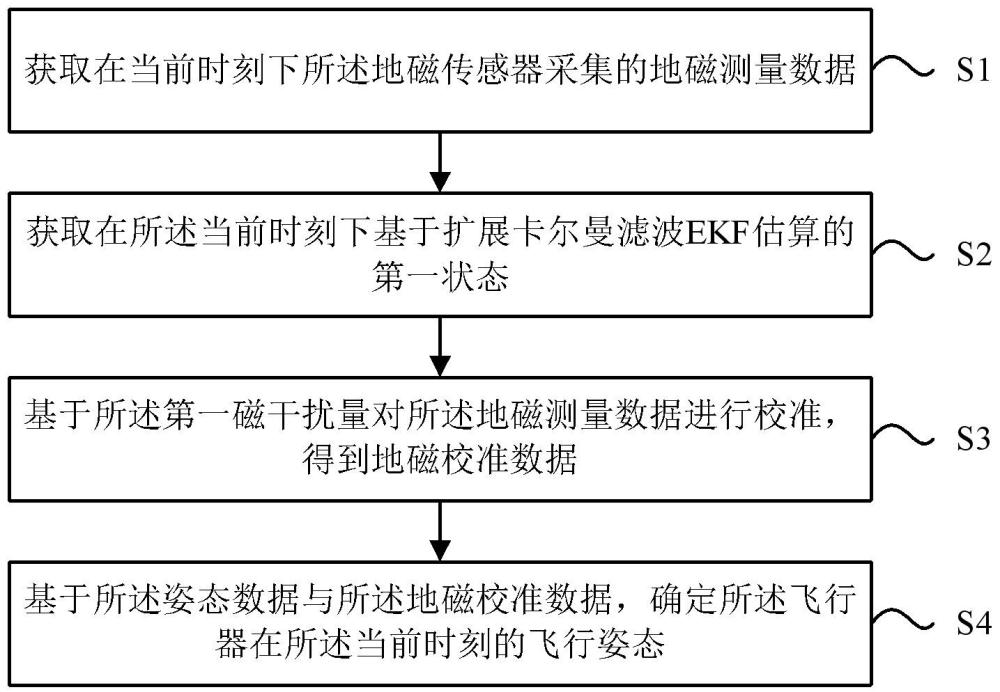
3、获取在当前时刻下所述地磁传感器采集的地磁测量数据;
4、获取在所述当前时刻下基于扩展卡尔曼滤波ekf估算的第一状态;所述第一状态包括姿态数据与第一磁干扰量;
5、基于所述第一磁干扰量对所述地磁测量数据进行校准,得到地磁校准数据;
6、基于所述姿态数据与所述地磁校准数据,确定所述飞行器在所述当前时刻的飞行姿态。
7、在上述实现过程中,基于ekf估算的第一磁干扰量随时间变化,可以反映动态的硬磁干扰。利用在线估算的第一磁干扰量对地磁测量数据进行校准,能够消除动态的硬磁干扰对地磁传感器的影响。因此基于估算的姿态信息与地磁测量数据所确定的飞行姿态是精准的,由此可以向飞控提供精准的姿态信息。
8、进一步地,所述飞行器预存有第二磁干扰量,所述第二磁干扰量是通过预设的校准运动确定的;所述地磁测量数据是基于所述第二磁干扰量校准的。
9、在上述实现过程中,利用预存的第二磁干扰量与在线估算的第一磁干扰量对地磁传感器先后进行离线校准与在线校准,一方面有助于在线校准的快速收敛,另一方面能够进一步提高飞行姿态的精准度。
10、进一步地,所述飞行器还搭载有加速度传感器,所述飞行器预存有基于ekf的预测方程、加速度更新方程、与地磁更新方程;所述获取在所述当前时刻下基于扩展卡尔曼滤波ekf估算的第一状态,包括:
11、获取在所述当前时刻下所述加速度传感器采集的加速度测量数据;
12、基于所述加速度测量数据、所述预测方程与所述加速度更新方程,估算在当前时刻下的第二状态;
13、基于所述地磁测量数据与所述地磁更新方程对所述第二状态进行校准,得到所述第一状态。
14、在上述实现过程中,完成了基于预测方程、加速度更新方程与地磁更新方程进行第一状态的估算。
15、进一步地,所述飞行器还搭载有陀螺仪;所述预测方程、加速度更新方程与所述地磁更新方程通过以下步骤预先建立:
16、建立用于表征状态量随时间变化的状态方程;其中,所述状态量包括:姿态数据、陀螺仪零偏、参考坐标系的地磁数据、与机体坐标系的磁干扰量;
17、建立加速度测量方程与地磁测量方程;其中,所述加速度测量方程用于表征机体坐标系的加速度观测量随所述状态量的变化;所述地磁测量方程用于表征所述机体坐标系的地磁观测量随所述状态量的变化;
18、基于所述状态方程、所述加速度测量方程与所述地磁测量方程,建立所述预测方程、加速度更新方程与所述地磁更新方程。
19、在上述实现过程中,完成了基于加速度测量方程与地磁测量方程建立预测方程、加速度更新方程与地磁更新方程。
20、进一步地,所述基于所述姿态数据与所述地磁校准数据,确定所述飞行器在所述当前时刻的飞行姿态,包括:
21、基于所述姿态数据,确定所述飞行器的滚转角和俯仰角;
22、基于所述校准数据确定所述飞行器的航向角。
23、在上述实现过程中,通过ekf估算的第一状态来消除动态的硬磁干扰对地磁传感器的影响,能够提供飞行器在每一时刻下精准的飞行姿态。
24、进一步地,所述方法还包括:
25、基于所述滚转角、所述俯仰角与所述航向角,确定目标姿态四元数;
26、基于所述目标姿态四元数控制所述飞行器的位姿。
27、在上述实现过程中,通过将欧拉角转换为目标姿态四元数进行飞行器位姿的控制,保障了飞行器的飞行安全,避免了“刷锅”现象甚至是炸机的发生。
28、进一步地,所述方法还包括:
29、在所述第一磁干扰量大于预设阈值的情况下,向用户输出磁干扰校准提示;
30、在所述飞行器进行预设的校准运动的过程中,将满足校准结束条件时的第一磁干扰量存储为第二磁干扰量。
31、在上述实现过程中,提供了离线校准与在线校准这两种方式,确保了飞行姿态的高准确性,为飞行安全提供了强而有效的保障。
32、本申请实施例第二方面提供了一种飞行器,包括:
33、地磁传感器,用于采集地磁测量数据;
34、处理器;
35、用于存储处理器可执行指令的存储器;
36、其中,所述处理器调用所述可执行指令时实现第一方面任一所述方法的操作。
37、本申请实施例第三方面提供了一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现第一方面任一所述的方法。
38、本申请实施例第四方面提供了一种计算机可读存储介质,其上存储有计算机指令,所述计算机指令被处理器执行时实现第一方面任一所述方法的步骤。
技术特征:1.一种飞行器的姿态校准方法,其特征在于,所述飞行器搭载有地磁传感器;所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述飞行器预存有第二磁干扰量,所述第二磁干扰量是通过预设的校准运动确定的;所述地磁测量数据是基于所述第二磁干扰量校准的。
3.根据权利要求1所述的方法,其特征在于,所述飞行器还搭载有加速度传感器,所述飞行器预存有基于ekf的预测方程、加速度更新方程、与地磁更新方程;所述获取在所述当前时刻下基于扩展卡尔曼滤波ekf估算的第一状态,包括:
4.根据权利要求3所述的方法,其特征在于,所述飞行器还搭载有陀螺仪;所述预测方程、加速度更新方程与所述地磁更新方程通过以下步骤预先建立:
5.根据权利要求1所述的方法,其特征在于,所述基于所述姿态数据与所述地磁校准数据,确定所述飞行器在所述当前时刻的飞行姿态,包括:
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,所述方法还包括:
8.一种飞行器,其特征在于,包括:
9.一种计算机程序产品,其特征在于,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现权利要求1-7中任意一项权利要求所述的方法。
10.一种计算机可读存储介质,其特征在于,其上存储有计算机指令,所述计算机指令被处理器执行时实现权利要求1-7任一所述方法的步骤。
技术总结本申请实施例提供一种飞行器的姿态校准方法、飞行器、程序产品及介质,飞行器搭载有地磁传感器;所述方法包括:获取在当前时刻下地磁传感器采集的地磁测量数据;获取在当前时刻下基于扩展卡尔曼滤波EKF估算的第一状态;第一状态包括姿态数据与第一磁干扰量;基于第一磁干扰量对地磁测量数据进行校准,得到地磁校准数据;基于姿态数据与地磁校准数据,确定所述飞行器在当前时刻的飞行姿态。利用在线估算的第一磁干扰量量化动态的硬磁干扰,并利用第一磁干扰量对地磁测量数据进行校准,从而消除动态的硬磁干扰对地磁传感器的影响。因此基于估算的姿态信息与地磁测量数据所确定的飞行姿态是精准的,由此提供精准的姿态信息。技术研发人员:陈方平,王娟,倪学斌,陈海诺,张小杰受保护的技术使用者:天津云圣智能科技有限责任公司技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/279178.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。