分布式光伏清扫机器人及其控制方法与流程
- 国知局
- 2024-08-22 14:49:03
本申请涉及智能控制领域,且更为具体地,涉及一种分布式光伏清扫机器人及其控制方法。
背景技术:
1、随着可再生能源的快速发展,光伏发电作为清洁能源的重要形式之一有着广泛应用。然而,光伏组件在长期运行过程中会受到各种环境因素的影响,例如灰尘、污垢、鸟粪等会积聚在光伏组件表面,导致光伏发电效率下降。因此,定期清洁和巡检光伏组件表面是确保光伏发电效率的重要措施之一。
2、然而,传统的光伏组件清洁和巡检工作通常由人工完成,人工巡检和清洗工作不仅效率较低,难以适应大规模的光伏组件表面清洗工作,而且安全隐患较大。现有一些分布式光伏清扫机器人的出现能够代替人工来进行光伏组件的清洗和巡检工作,提高了清洗和巡检的效率和准确性。但是,由于一些光伏组件可能会出现缺陷问题,若对于缺陷的光伏组件进行清洗,很可能会造成安全隐患。同时,现有的光伏清扫机器人只能对于光伏组件的表面污垢进行检测,很难捕获关于光伏组件的表面缺陷,尤其是对于微小的缺陷问题,传统的光伏组件清洁和巡检工作很难适应。
3、因此,期望一种优化的分布式光伏清扫机器人。
技术实现思路
1、为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种分布式光伏清扫机器人及其控制方法,其在分布式光伏清扫机器人进行清洗的过程中通过安装在分布式光伏清扫机器人的摄像头实时采集光伏组件表面图像,并在后端利用基于机器视觉的图像处理和分析算法来进行该光伏组件表面图像的分析,以此来利用光伏组件表面图像的不同层次的语义特征来更为充分和准确地捕捉光伏组件表面的缺陷特征,从而进行光伏组件的缺陷检测,并在检测到缺陷问题时生成提示信号并暂停清洗操作。这样,能够实现对于光伏组件的自动化清洗和巡检,以在清洗的过程中避免光伏组件的表面缺陷问题导致的安全隐患,并能够对于光伏组件进行及时的清洗和维护服务,从而保证发电效率和质量。
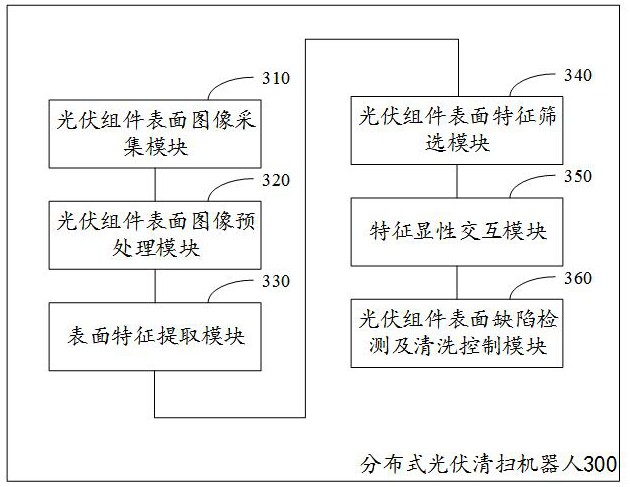
2、根据本申请的一个方面,提供了一种分布式光伏清扫机器人,其包括:光伏组件表面图像采集模块,用于获取由分布式光伏清扫机器人的摄像头采集的光伏组件表面图像;光伏组件表面图像预处理模块,用于对所述光伏组件表面图像进行尺寸标准化和灰度化处理以得到灰度标准化光伏组件表面图像;表面特征提取模块,用于通过基于深度神经网络模型的表面特征提取器对所述灰度标准化光伏组件表面图像进行表面浅层和表面语义特征提取以得到光伏组件表面浅层特征图和光伏组件表面语义特征图;光伏组件表面特征筛选模块,用于将所述光伏组件表面浅层特征图和所述光伏组件表面语义特征图分别通过基于门控注意力开关网络的特征筛选器以得到光伏组件表面浅层纯化特征向量和光伏组件表面语义纯化特征向量;特征显性交互模块,用于对所述光伏组件表面浅层纯化特征向量和所述光伏组件表面语义纯化特征向量进行特征显性交互以得到光伏组件表面多尺度交互融合特征;光伏组件表面缺陷检测及清洗控制模块,用于基于所述光伏组件表面多尺度交互融合特征,确定光伏组件表面是否存在缺陷,并确定是否生成提示信号并暂停清洗操作。
3、根据本申请的另一个方面,提供了一种分布式光伏清扫机器人的控制方法,其包括:获取由分布式光伏清扫机器人的摄像头采集的光伏组件表面图像;对所述光伏组件表面图像进行尺寸标准化和灰度化处理以得到灰度标准化光伏组件表面图像;通过基于深度神经网络模型的表面特征提取器对所述灰度标准化光伏组件表面图像进行表面浅层和表面语义特征提取以得到光伏组件表面浅层特征图和光伏组件表面语义特征图;将所述光伏组件表面浅层特征图和所述光伏组件表面语义特征图分别通过基于门控注意力开关网络的特征筛选器以得到光伏组件表面浅层纯化特征向量和光伏组件表面语义纯化特征向量;对所述光伏组件表面浅层纯化特征向量和所述光伏组件表面语义纯化特征向量进行特征显性交互以得到光伏组件表面多尺度交互融合特征;基于所述光伏组件表面多尺度交互融合特征,确定光伏组件表面是否存在缺陷,并确定是否生成提示信号并暂停清洗操作。
4、与现有技术相比,本申请提供的一种分布式光伏清扫机器人及其控制方法,其在分布式光伏清扫机器人进行清洗的过程中通过安装在分布式光伏清扫机器人的摄像头实时采集光伏组件表面图像,并在后端利用基于机器视觉的图像处理和分析算法来进行该光伏组件表面图像的分析,以此来利用光伏组件表面图像的不同层次的语义特征来更为充分和准确地捕捉光伏组件表面的缺陷特征,从而进行光伏组件的缺陷检测,并在检测到缺陷问题时生成提示信号并暂停清洗操作。这样,能够实现对于光伏组件的自动化清洗和巡检,以在清洗的过程中避免光伏组件的表面缺陷问题导致的安全隐患,并能够对于光伏组件进行及时的清洗和维护服务,从而保证发电效率和质量。
技术特征:1.一种分布式光伏清扫机器人,其特征在于,包括:光伏组件表面图像采集模块,用于获取由分布式光伏清扫机器人的摄像头采集的光伏组件表面图像;光伏组件表面图像预处理模块,用于对所述光伏组件表面图像进行尺寸标准化和灰度化处理以得到灰度标准化光伏组件表面图像;表面特征提取模块,用于通过基于深度神经网络模型的表面特征提取器对所述灰度标准化光伏组件表面图像进行表面浅层和表面语义特征提取以得到光伏组件表面浅层特征图和光伏组件表面语义特征图;光伏组件表面特征筛选模块,用于将所述光伏组件表面浅层特征图和所述光伏组件表面语义特征图分别通过基于门控注意力开关网络的特征筛选器以得到光伏组件表面浅层纯化特征向量和光伏组件表面语义纯化特征向量;特征显性交互模块,用于对所述光伏组件表面浅层纯化特征向量和所述光伏组件表面语义纯化特征向量进行特征显性交互以得到光伏组件表面多尺度交互融合特征;光伏组件表面缺陷检测及清洗控制模块,用于基于所述光伏组件表面多尺度交互融合特征,确定光伏组件表面是否存在缺陷,并确定是否生成提示信号并暂停清洗操作。
2.根据权利要求1所述的分布式光伏清扫机器人,其特征在于,所述表面特征提取模块,包括:光伏组件表面浅层特征提取单元,用于将所述灰度标准化光伏组件表面图像通过基于第一卷积神经网络模型的表面浅层特征提取器以得到所述光伏组件表面浅层特征图;光伏组件表面语义特征提取单元,用于将所述灰度标准化光伏组件表面图像通过基于第二卷积神经网络模型的表面语义特征提取器以得到所述光伏组件表面语义特征图。
3.根据权利要求2所述的分布式光伏清扫机器人,其特征在于,所述光伏组件表面特征筛选模块,用于:将所述光伏组件表面浅层特征图通过所述基于门控注意力开关网络的特征筛选器以如下特征筛选公式进行处理以得到所述光伏组件表面浅层纯化特征向量;其中,所述特征筛选公式为:;其中,和分别为所述光伏组件表面浅层特征图中沿通道维度的各个特征矩阵向量化排列得到的光伏组件表面浅层特征向量的序列中第和第个光伏组件表面浅层特征向量,是所述光伏组件表面浅层特征向量的序列,表示以2为底的对数函数值,为各个所述光伏组件表面浅层特征向量的长度,为所述光伏组件表面浅层特征向量的序列中向量的个数-1,为光伏组件表面浅层局部差异特征向量中各个位置的特征值,为掩码化操作,为掩码光伏组件表面浅层局部差异特征向量中各个位置的特征值,是所述掩码光伏组件表面浅层局部差异特征向量的长度,为指数运算,是所述光伏组件表面浅层纯化特征向量。
4.根据权利要求3所述的分布式光伏清扫机器人,其特征在于,所述特征显性交互模块,用于:使用特征分布特征值粒度交互模块以如下特征值粒度交互公式对所述光伏组件表面浅层纯化特征向量和所述光伏组件表面语义纯化特征向量进行特征显性交互以得到光伏组件表面多尺度交互融合特征向量作为所述光伏组件表面多尺度交互融合特征;其中,所述特征值粒度交互公式为:;其中,和分别为所述光伏组件表面浅层纯化特征向量和所述光伏组件表面语义纯化特征向量中各个位置的特征值,表示常数偏置,为偏置向量,为偏置矩阵,为所述光伏组件表面浅层纯化特征向量或所述光伏组件表面语义纯化特征向量中特征值的个数,为所述光伏组件表面多尺度交互融合特征向量。
5.根据权利要求4所述的分布式光伏清扫机器人,其特征在于,所述光伏组件表面缺陷检测及清洗控制模块,包括:光伏组件表面缺陷检测单元,用于将所述光伏组件表面多尺度交互融合特征向量通过分类器以得到分类结果,所述分类结果用于表示光伏组件表面是否存在缺陷;清洗操作控制单元,用于响应于所述分类结果为光伏组件表面存在缺陷,生成提示信号并暂停清洗操作。
6.根据权利要求5述的分布式光伏清扫机器人,其特征在于,还包括用于对所述基于第一卷积神经网络模型的表面浅层特征提取器、所述基于第二卷积神经网络模型的表面语义特征提取器、所述基于门控注意力开关网络的特征筛选器、所述特征分布特征值粒度交互模块和所述分类器进行训练的训练模块。
7.根据权利要求6所述的分布式光伏清扫机器人,其特征在于,所述训练模块,包括:训练数据获取单元,用于获取由分布式光伏清扫机器人的摄像头采集的训练光伏组件表面图像;训练表面图像预处理单元,用于对所述训练光伏组件表面图像进行尺寸标准化和灰度化处理以得到训练灰度标准化光伏组件表面图像;训练表面浅层特征提取单元,用于将所述训练灰度标准化光伏组件表面图像通过基于第一卷积神经网络模型的表面浅层特征提取器以得到训练光伏组件表面浅层特征图;训练表面语义特征提取单元,用于将所述训练灰度标准化光伏组件表面图像通过基于第二卷积神经网络模型的表面语义特征提取器以得到训练光伏组件表面语义特征图;训练表面特征筛选单元,用于将所述训练光伏组件表面浅层特征图和所述训练光伏组件表面语义特征图分别通过基于门控注意力开关网络的特征筛选器以得到训练光伏组件表面浅层纯化特征向量和训练光伏组件表面语义纯化特征向量;训练特征显性交互单元,用于对所述训练光伏组件表面浅层纯化特征向量和所述训练光伏组件表面语义纯化特征向量进行特征显性交互以得到训练光伏组件表面多尺度交互融合特征向量;优化单元,用于对所述训练光伏组件表面多尺度交互融合特征向量的各个特征值进行聚类优化以得到优化训练光伏组件表面多尺度交互融合特征向量;分类损失单元,用于将所述优化训练光伏组件表面多尺度交互融合特征向量通过分类器以得到分类损失函数值;训练单元,用于基于所述分类损失函数值对所述基于第一卷积神经网络模型的表面浅层特征提取器、所述基于第二卷积神经网络模型的表面语义特征提取器、所述基于门控注意力开关网络的特征筛选器、所述特征分布特征值粒度交互模块和所述分类器进行训练。
8.根据权利要求7所述的分布式光伏清扫机器人,其特征在于,所述优化单元,用于:对所述训练光伏组件表面多尺度交互融合特征向量的各个特征值进行基于特征值间距离的聚类以得到聚类特征集合;基于所述聚类特征集合,对所述光伏组件表面多尺度交互融合特征向量进行基于聚类后的特征类内和类外表征优化以得到所述优化训练光伏组件表面多尺度交互融合特征向量。
9.一种分布式光伏清扫机器人的控制方法,其特征在于,包括:获取由分布式光伏清扫机器人的摄像头采集的光伏组件表面图像;对所述光伏组件表面图像进行尺寸标准化和灰度化处理以得到灰度标准化光伏组件表面图像;通过基于深度神经网络模型的表面特征提取器对所述灰度标准化光伏组件表面图像进行表面浅层和表面语义特征提取以得到光伏组件表面浅层特征图和光伏组件表面语义特征图;将所述光伏组件表面浅层特征图和所述光伏组件表面语义特征图分别通过基于门控注意力开关网络的特征筛选器以得到光伏组件表面浅层纯化特征向量和光伏组件表面语义纯化特征向量;对所述光伏组件表面浅层纯化特征向量和所述光伏组件表面语义纯化特征向量进行特征显性交互以得到光伏组件表面多尺度交互融合特征;基于所述光伏组件表面多尺度交互融合特征,确定光伏组件表面是否存在缺陷,并确定是否生成提示信号并暂停清洗操作。
技术总结本申请公开了一种分布式光伏清扫机器人及其控制方法,其在分布式光伏清扫机器人进行清洗的过程中通过安装在分布式光伏清扫机器人的摄像头实时采集光伏组件表面图像,并在后端利用基于机器视觉的图像处理和分析算法来进行该光伏组件表面图像的分析,以此来利用光伏组件表面图像的不同层次的语义特征来更为充分和准确地捕捉光伏组件表面的缺陷特征,从而进行光伏组件的缺陷检测,并在检测到缺陷问题时生成提示信号并暂停清洗操作。这样,能够实现对于光伏组件的自动化清洗和巡检,以在清洗的过程中避免光伏组件的表面缺陷问题导致的安全隐患,并能够对于光伏组件进行及时的清洗和维护服务,从而保证发电效率和质量。技术研发人员:丁辉,林佳辉,顾栋威受保护的技术使用者:海宁昱天新能源科技有限公司技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/279993.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。