多轴运动平台的制作方法
- 国知局
- 2024-08-22 14:44:19
本发明涉及一种多轴运动平台,更具体地,涉及结构简化且响应速度及精度得到改善的平台。
背景技术:
1、通常,并联机器人指的是具有由两个以上的支腿支撑平台或移动平台的结构的机器人,与一个串行链路组成的串联仪器不同。两个以上的支腿可以分别独立驱动,因此也被称为多轴运动平台。串联机器人在所有关节都安装有驱动器,但并联机器人的特征在于,各支腿在固定部或附近都安装有一个至两个驱动器,剩下的关节由手动关节组成。
2、由于并联机器人作用于平台的力量由多个支腿支撑,因此与机器人自身重量相比,具有较高的承载能力和刚性。并且,与串联机器人不同,并联机器人不会累积驱动部的误差,链接的静态/动态变形相对较小。因此,并联机器人适用于精确作业或需要大力量的作业。
3、例如,并联机器人广泛用作飞行装置、海上舰艇及车辆等各种移动性的基础设计及性能评估的模拟器,也可以安装在机床的末端部(end-effector),以进行精细的精密作业。此外,并联机器人在家庭娱乐设备、驾驶模拟器或卫星天线等,在各行业方面的用途正逐渐多样化。
4、如上所述,当考虑到并联机器人的使用领域时,改善精密性和响应速度为重要问题。为了改善精密性和响应速度,存在许多增加支腿数量的并联机器人,但使用六个液压式执行器精密控制各个支腿仍存在规定的困难。
5、因此,需要开发一种具有新型结构的多轴并联仪器,即,结构简单且响应速度及精度得到改善的多轴并联仪器。
技术实现思路
1、技术问题
2、本发明用于解决上述的现有技术的问题,本发明的目的在于,提供能够利用多个臂实现各种运动且响应速度及精度得到改善的多轴运动平台。
3、本发明的目的不限定于以上提及的目的,本领域的普通技术人员可以从以下的记载明确理解未提及的其他目的。
4、技术方案
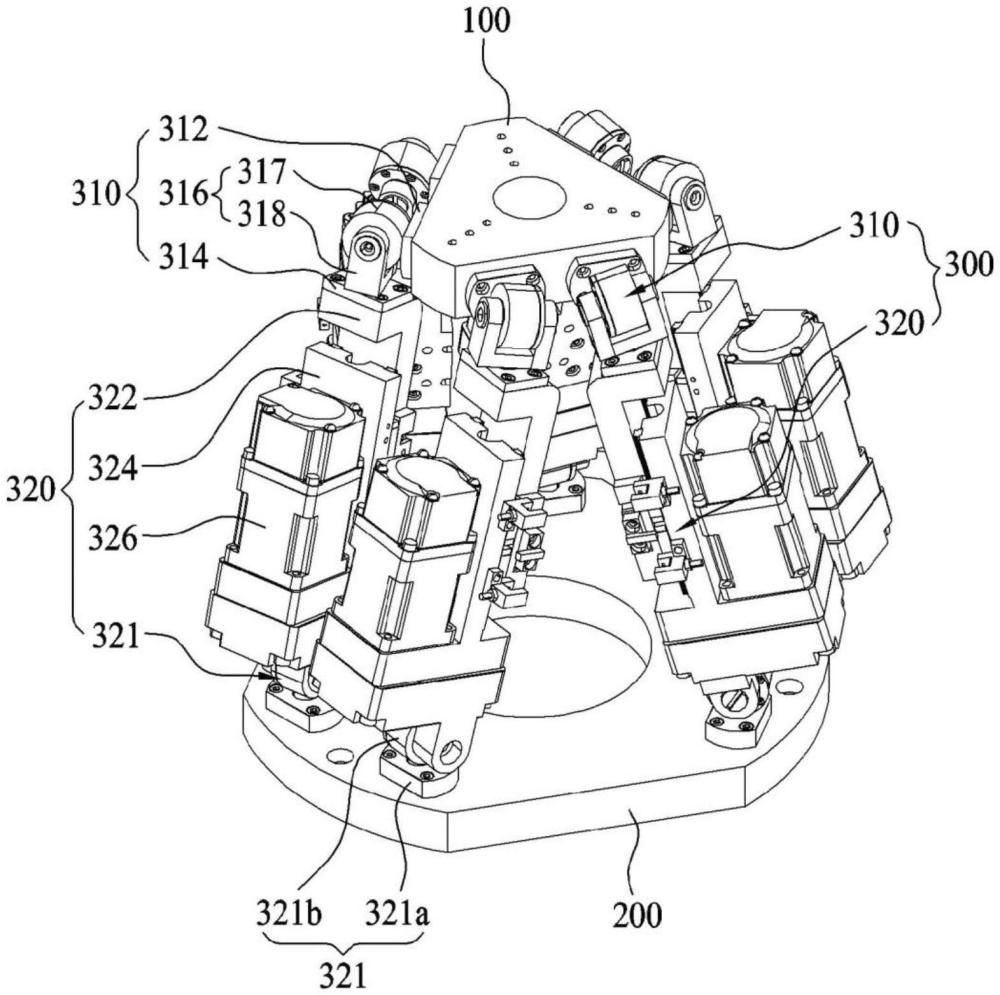
5、用于实现上述目的的本发明的多轴运动平台包括:上部板,沿周向划分为具有规定长度的多个第一结合区域,能够上下运动或倾斜运动;基座,固定在设置面,沿周向划分为具有规定长度的多个第二结合区域;以及六个长度调节模块,上端部以能够转动的方式与上述上部板相结合,下端部以能够转动的方式与上述基座相结合,并沿长度方向伸缩以将直线运动能量传递到上述上部板,在上述长度调节模块中,一对上端部相邻地设置在各个上述第一结合区域,下端部与多个上述第二结合区域中的不同位置相结合并以彼此错开的方式交叉设置。
6、并且,上述长度调节模块可包括:连接单元,延伸形成且一部分以能够弯曲的方式构成,以一侧能够在上述第一结合区域将轴作为中心进行旋转的方式相结合;以及臂(arm),能够伸缩,上端部以能够将轴作为中心进行旋转的方式与上述连接单元的另一侧相结合,下端部以能够多轴旋转的方式与上述基座相结合。
7、并且,上述连接单元可包括:第一轴承部,设置在上述第一结合区域;第二轴承部,设置在上述臂的上端部;以及铰链部,铰链部的两个部件沿长度方向铰链结合,两端部以能够将轴作为中心进行旋转的方式分别与上述第一轴承部及上述第二轴承部相结合。
8、并且,上述第一轴承部及上述第二轴承部形成为滚珠轴承的形态,可分别设置在上述上部板和上述臂的上端部内。
9、并且,上述铰链部可包括:旋转部件,具有预设宽度且沿宽度方向形成中空,一部分突出并与第一轴承部或上述第二轴承部中任意一个相结合;以及支架,一侧形成为“u”字形,以能够将上述旋转部件的中空作为中心进行旋转的方式结合,另一侧与上述第一轴承部或上述第二轴承部中剩下的一个相结合。
10、并且,上述支架可由两个部件组成,能够沿上述旋转部件的宽度方向在两侧调节结合间距。
11、并且,上述臂可包括:固定框架,具有规定长度,下端部与上述基座相结合;工作框架,在上述固定框架上能够沿长度方向升降,上端部与上述连接单元相结合;以及驱动部,与上述固定框架相连接,用于调节上述工作框架的升降。
12、并且,上述驱动部可包括:驱动电机,用于提供旋转驱动力;滚珠丝杆,通过上述驱动电机的旋转运动而一同旋转;以及滚珠螺母,设置在上述工作框架,沿上述滚珠丝杆的长度方向调节位置。
13、并且,可形成用于检测上述臂的伸缩程度的多个检测传感器。
14、发明的效果
15、用于实现上述目的的本发明的多轴运动平台具有如下效果。
16、首先,设置用于支撑上部板并使其进行工作的六个臂,来实现各种运动,同时还能通过精密调节臂的伸缩结构来改善响应速度及精度。
17、其次,连接臂和上部板时,利用滚珠轴承及铰链来能够实现多轴移动,与球形态或万向节形态相比,增加了耐久性并能够防止腐蚀。
18、本发明的效果不限定于以上提及的效果,本领域的普通技术人员可以从发明要求保护范围中的记载明确理解未提及的其他效果。
技术特征:1.一种多轴运动平台,其特征在于,
2.根据权利要求1所述的多轴运动平台,其特征在于,上述长度调节模块包括:
3.根据权利要求2所述的多轴运动平台,其特征在于,上述连接单元包括:
4.根据权利要求3所述的多轴运动平台,其特征在于,上述第一轴承部及上述第二轴承部形成为滚珠轴承的形态,分别设置在上述上部板和上述臂的上端部内。
5.根据权利要求3所述的多轴运动平台,其特征在于,上述铰链部包括:
6.根据权利要求5所述的多轴运动平台,其特征在于,上述支架由两个部件组成,能够沿上述旋转部件的宽度方向在两侧调节结合间距。
7.根据权利要求2所述的多轴运动平台,其特征在于,上述臂包括:
8.根据权利要求7所述的多轴运动平台,其特征在于,上述驱动部包括:
9.根据权利要求7所述的多轴运动平台,其特征在于,形成用于检测上述臂的伸缩程度的多个检测传感器。
技术总结本发明的多轴运动平台包括:上部板,沿周向划分为具有规定长度的多个第一结合区域,且能够上下运动或倾斜运动;基座,固定在设置面,沿周向划分为具有规定长度的多个第二结合区域;以及六个长度调节模块,上端部以能够转动的方式与上述上部板相结合,下端部以能够转动的方式与上述基座相结合,并沿长度方向伸缩以将直线运动能量传递到上述上部板,在上述长度调节模块中,一对上端部相邻地设置在各个上述第一结合区域,下端部与多个上述第二结合区域中的不同位置相结合并以彼此错开的方式交叉设置。技术研发人员:孙文培受保护的技术使用者:株式会社三昇泰克技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/279663.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表