用于输送基于导管的血泵的无荧光系统和方法与流程
- 国知局
- 2024-08-22 15:11:40
本公开涉及基于导管的血泵,并且具体地,涉及可以在不使用荧光透视的情况下输送给患者的血泵。
背景技术:
1、基于导管的血泵,特别是旨在插入患者心脏中的血泵,传统上使用外部成像设备通过外科手术插入或植入血管(例如患者心脏的腔室)中。通常,导丝可以经由导引鞘插入到例如股静脉或颈静脉中,并且通常在荧光透视或其他类似的成像技术下,导丝被操纵通过患者的脉管系统。然后,血泵也在荧光透视(fluoroscopy)下沿着导丝推进,直到血泵处于期望的位置。
2、然而,使用荧光透视或其他类似技术需要额外的扫描仪和检测器,这可能增加已经复杂的手术的复杂性,并且荧光透视设备并不总是在每个手术室中可用。因此,具有一种不依赖于荧光透视或其他类似成像技术的用于插入血泵的简单方法将是有用的。
技术实现思路
1、下面通过所公开的系统和方法解决了常规技术中的各种缺陷。
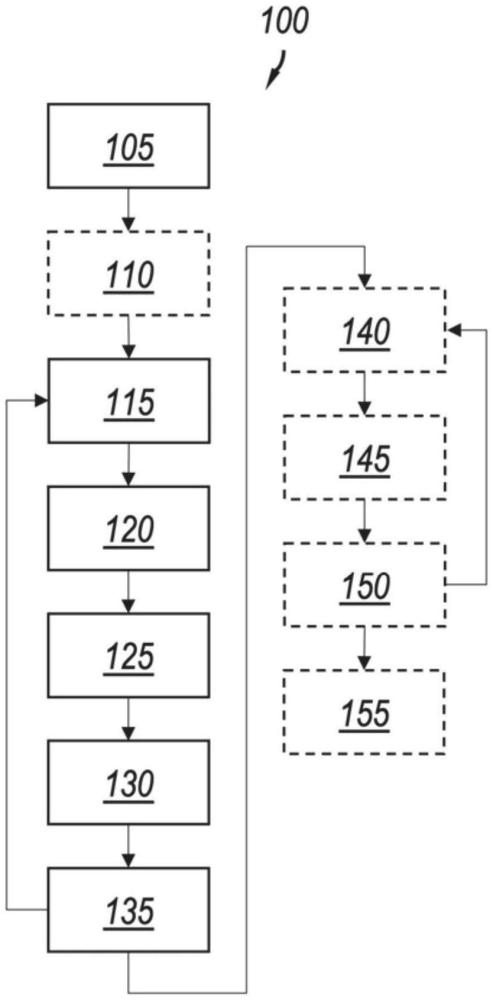
2、可以提供一种用于基于导管的血泵的无荧光输送(flouro-less delivery)的方法。所公开的方法通常涉及使用导丝成像技术来创建从插入部位一直到心脏的血管的三维图像或分布图。该成像技术提供了有用的界标以及关于曲折度和位置的信息。然后,该方法使用直接或间接技术在插入期间测量泵和/或泵导管位置。然后可以将该泵位置叠加到由导丝创建的三维图像或分布图上,以确定血管中的流入位置、与关键标志的接近度,并且在没有荧光透视的情况下辅助输送。
3、更具体地,该方法可以涉及使用导丝上的传感器标测从插入部位通过患者的一个或多个血管(例如,通过患者的脉管系统朝向患者的心脏)的路径。然后,包括血泵的导管可以沿着导丝朝向患者的心脏前进,该导管穿过导引鞘或缝合毂的内腔。在该前进期间,导管通过内腔的双向轴向移动和/或旋转可以使用可操作地连接到导引鞘或缝合毂的传感器直接或间接地测量。传感器可以是例如滚轮编码器、光学检测器(例如,用于在导管穿过内腔时检测导管上的标记),或者可以被配置为测量涡电流(假设导管中存在适当的铁磁材料)。然后,该方法可以涉及基于所测量的导管的双向轴向移动来确定血泵沿着标测路径的位置。利用所确定的位置,可以显示标测路径的至少一部分和沿着标测路径的血泵的所确定的位置的表示。
4、可选地,该方法还可以包括将表示血泵在完全插入位置的位置的值存储在非暂时性计算机可读介质上。这可以在随时间监测和跟踪泵位置时使用,以确保泵保持在适当位置。例如,在血泵完全插入之后,可以存储此时血泵的位置。可选地,该方法可以包括测量导管通过内腔的附加双向轴向移动和/或旋转,并且基于测量到的导管的附加双向轴向移动和/或旋转以及该存储值来确定血泵的位置是否已经改变超过预定阈值。
5、在一些实施例中,可以提供一种用于将基于导管的血泵输送到患者的无荧光系统。该系统可以包括至少两个部件:(i)具有传感器的导引鞘或缝合毂,该传感器被配置成提供关于包括血泵的导管通过内腔的双向轴向移动的反馈,该内腔被配置和尺寸设计成可滑动地接收导管;以及(ii)至少一个处理器,所述至少一个处理器被配置成接收所述反馈,并且基于所述反馈确定所述血泵沿着患者脉管系统内的预标测路径的线性定位和/或旋转取向。
6、该系统优选地还可以包括显示器。所述至少一个处理器可以被配置为发送至少一个图像,所述至少一个图像包括预标测路径和至少针对血泵沿着预标测路径的位置和/或旋转取向的指示。
7、该系统优选地还可以包括具有传感器的导丝,该传感器被配置为向至少一个处理器提供信息,并且其中处理器可以被配置为基于该信息生成导丝的三维路径,然后可以使用所生成的导丝的三维路径作为预标测路径。
8、可选地,至少一个处理器还可以被配置成存储表示在血泵完全插入之后血泵的位置和/或取向的值。表示血泵的位置的值可以包括例如三维坐标、表示旋转取向的一个或多个值、或表示导管沿着预标测路径移动的线性距离的值。
9、可选地,一个或更多个处理器可以被配置成在血泵已经完全插入之后接收关于导管的双向轴向移动和/或旋转的反馈,并且跟踪血泵在一段时间内的位置,该段时间可以包括从最终插入到患者走动之后的时间点的时间段。
10、可选地,该系统还可以包括耦合到至少一个处理器的至少一个有线或无线收发器。
11、可选地,一个或更多个处理器还可以被配置成确定血泵的当前位置与血泵首次完全插入时的位置之间的差异,并且如果该差异大于预定阈值,则生成警告或警报。
12、可选地,所述一个或更多个处理器还可以被配置成确定所述血泵的当前位置与所述血泵的最近确定的位置之间的差异,并且如果所述差异大于预定阈值,则生成警告或警报。
13、可以提供一种用于输送基于导管的血泵的无荧光系统的导引鞘。导引鞘可以包括具有近侧区域和远侧区域的管状主体部分,管状主体部分限定内腔,该内腔构造和尺寸设计成可滑动地接收导管。导引鞘还包括可操作地连接到管状主体部分的近侧区域的传感器;所述传感器被配置成提供关于所述导管通过所述管状主体部分的双向轴向移动和/或旋转的反馈。传感器可以是例如滚轮编码器或光学检测器,或者可以被配置为测量涡电流。
14、可以提供缝合毂。缝合毂可以包括限定内腔的中心主体部分和可操作地连接到中心主体部分的传感器,该内腔被配置和尺寸设计成可滑动地接收导管,该传感器被配置成提供关于导管通过中心主体部分的双向轴向移动和/或旋转的反馈。传感器可以是例如滚轮编码器或光学检测器,或者可以被配置为测量涡电流。
技术特征:1.一种用于基于导管的血泵的无荧光输送的方法,包括:
2.根据权利要求1所述的方法,还包括存储表示所述血泵处于完全插入目标位置中的位置的值。
3.根据权利要求1所述的方法,还包括:
4.一种用于将基于导管的血泵输送到患者的无荧光系统,包括:
5.根据权利要求4所述的系统,还包括显示器,并且其中,所述至少一个处理器还被配置为将包括所述预标测路径的至少一个图像和所述血泵沿着所述预标测路径的位置和/或取向的至少一个指示发送到所述显示器。
6.根据权利要求4所述的系统,还包括:
7.根据权利要求4所述的系统,其中,所述至少一个处理器还被配置成存储表示在所述血泵完全插入之后所述血泵的位置的值。
8.根据权利要求7所述的系统,其中,表示所述血泵的位置的值包括三维坐标。
9.根据权利要求7所述的系统,其中,表示所述血泵的位置的值包括表示所述导管沿着所述预标测路径移动的线性距离的值。
10.根据权利要求4所述的系统,其中,所述至少一个处理器还被配置成在所述血泵已经完全插入之后接收关于所述导管的双向轴向移动和/或旋转的反馈,并且在一段时间内跟踪所述血泵的位置。
11.根据权利要求10所述的系统,其中,在所述患者走动时跟踪所述血泵的位置。
12.根据权利要求4所述的系统,其中,所述系统还包括耦合到所述至少一个处理器的有线或无线收发器。
13.根据权利要求4所述的系统,其中,所述至少一个处理器还被配置成确定所述血泵的当前位置与所述血泵首次完全插入时的位置之间的差异,并且如果所述差异大于预定阈值,则生成警告或警报。
14.根据权利要求4所述的系统,其中,所述至少一个处理器还被配置为:
15.一种用于输送基于导管的血泵的无荧光系统的导引鞘,包括:
16.根据权利要求15所述的导引鞘,其中,所述传感器包括滚轮编码器、光学检测器、涡流传感器或其组合。
17.一种缝合毂,其包括:
18.根据权利要求17所述的缝合毂,其中,所述传感器包括滚轮编码器、光学检测器、涡流传感器或其组合。
技术总结所公开的系统和方法总体涉及使用导丝成像技术来创建从插入部位一直到心脏的血管的三维图像或分布图。该成像提供了有用的界标以及关于曲折度和位置的信息。然后,该方法使用直接或间接技术在插入期间测量泵和/或泵导管位置。然后可以将该泵位置叠加到由导丝创建的三维图像或分布图上,以确定血管中的流入位置、与关键标志的接近度,并且在没有荧光透视的情况下辅助输送。技术研发人员:V·罗伊受保护的技术使用者:阿比奥梅德公司技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/281577.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表