一种多功能一体化的机械臂的制作方法
- 国知局
- 2024-08-30 14:34:02
本技术涉及机械臂,具体为一种多功能一体化的机械臂。
背景技术:
1、机械臂是指高精度,高速点胶机器手,机械臂是一个多输入多输出、高度非线性、强耦合的复杂系统,因其独特的操作灵活性,已在工业装配,安全防爆等领域得到广泛应用,机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。
2、根据公示的一种多功能一体化机械臂(公开号:cn206913164u),包括机械臂主体,所述机械臂主体由设置在该机械臂主体底部的底座、设置在底座顶部的后臂及设置在后臂顶部的前臂构成的,上述申请文件中通过采用底座、前臂和后壁,进行夹持操作,但是该装置在对于弧形工件夹持时,存在工件跌落的情况产生。
技术实现思路
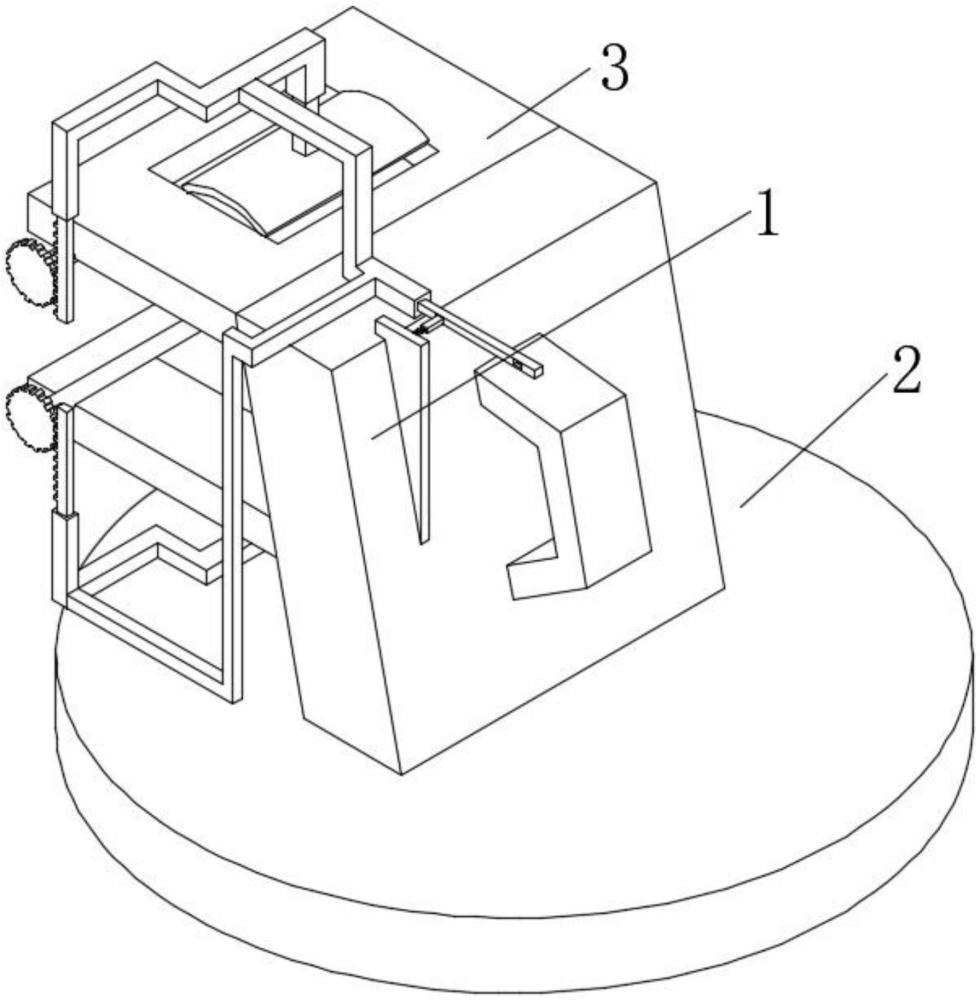
1、针对现有技术的不足,本实用新型提供了一种多功能一体化的机械臂,解决了上述背景技术中提出的问题。为实现以上目的,本实用新型通过以下技术方案予以实现:一种多功能一体化的机械臂,包括机械臂主体,所述机械臂主体的底部转动连接有底座,所述机械臂主体的侧面固定连接有固定夹,所述机械臂主体的侧面设置有调节组件;
2、所述调节组件包括液压仓,所述液压仓的内部转动连接有挡板,所述挡板的前端和后端固定连接有弹性杆,所述液压仓的一端活塞滑动连接有操纵杆,所述液压仓的一端活塞滑动连接有齿杆,所述液压仓的另一端活塞滑动连接有弧形板,所述固定夹靠近所述机械臂主体中心轴的一端转动连接有转轴,所述转轴的前端固定连接有齿轮,所述转轴的侧面固定连接有横板。
3、优选的,所述弹性杆设置有两组,每组所述弹性杆设置有两个,两个所述弹性杆关于所述挡板呈对称分布,使得挡板受到弹性杆的力更均匀。
4、优选的,所述齿轮位于所述齿杆的侧面位置,所述齿轮与所述齿杆之间呈啮合状态,使得齿杆移动,齿轮即可随之转动。
5、优选的,所述机械臂主体的顶部设置有卡紧组件;
6、所述卡紧组件包括固定板,所述固定板的后端固定连接有弹簧,所述弹簧的后端固定连接有卡杆,所述操纵杆的前端开设有限制槽。
7、优选的,所述固定板位于所述机械臂主体的侧面位置,所述固定板与所述机械臂主体之间呈固定状态。
8、优选的,所述限制槽设置有两个,两个所述限制槽截面的形状与所述卡杆截面的形状相同,使得卡杆置于限制槽内,即可限制操纵杆移动。
9、本实用新型提供了一种多功能一体化的机械臂。具备以下有益效果:
10、(1)该多功能一体化的机械臂,通过手动移动操纵杆,配合液压仓、挡板、弹性杆、齿杆、齿轮和转轴,使得横板优先产生转动,弧形板随后产生移动,使得该装置在对于弧形工件夹持时,降低工件跌落的可能性。
11、(2)该多功能一体化的机械臂,当需要移动操纵杆前,向固定板挤压弹簧,使得与弹簧固定连接的卡杆产生移动,卡杆从限制槽内移出,使得操纵杆失去限制,即可在无需移动操纵杆的情况下,降低误触的可能性。
技术特征:1.一种多功能一体化的机械臂,包括机械臂主体(1),其特征在于:所述机械臂主体(1)的底部转动连接有底座(2),所述机械臂主体(1)的侧面固定连接有固定夹(3),所述机械臂主体(1)的侧面设置有调节组件;
2.根据权利要求1所述的一种多功能一体化的机械臂,其特征在于:所述弹性杆(6)设置有两组,每组所述弹性杆(6)设置有两个,两个所述弹性杆(6)关于所述挡板(5)呈对称分布。
3.根据权利要求2所述的一种多功能一体化的机械臂,其特征在于:所述齿轮(10)位于所述齿杆(8)的侧面位置,所述齿轮(10)与所述齿杆(8)之间呈啮合状态。
4.根据权利要求3所述的一种多功能一体化的机械臂,其特征在于:所述机械臂主体(1)的顶部设置有卡紧组件;
5.根据权利要求4所述的一种多功能一体化的机械臂,其特征在于:所述固定板(16)位于所述机械臂主体(1)的侧面位置,所述固定板(16)与所述机械臂主体(1)之间呈固定状态。
6.根据权利要求5所述的一种多功能一体化的机械臂,其特征在于:所述限制槽(15)设置有两个,两个所述限制槽(15)截面的形状与所述卡杆(14)截面的形状相同。
技术总结本技术公开了一种多功能一体化的机械臂,涉及机械臂技术领域。该多功能一体化的机械臂,包括机械臂主体,所述机械臂主体的底部转动连接有底座,所述机械臂主体的侧面固定连接有固定夹,所述机械臂主体的侧面设置有调节组件;所述调节组件包括液压仓,所述液压仓的内部转动连接有挡板,所述挡板的前端和后端固定连接有弹性杆,所述液压仓的一端活塞滑动连接有操纵杆,所述液压仓的一端活塞滑动连接有齿杆。该多功能一体化的机械臂,通过手动移动操纵杆,配合液压仓、挡板、弹性杆、齿杆、齿轮和转轴,使得横板优先产生转动,弧形板随后产生移动,使得该装置在对于弧形工件夹持时,降低工件跌落的可能性。技术研发人员:赵宗岭受保护的技术使用者:上海沃勒起重设备有限公司技术研发日:20240115技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/282735.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表